畸变与标定三
一 相机标定
- 定义
在图像测量过程中,为确定空间物体表面某点三维几何位置与其在图像中对应的点之间相互关系,必须建立相机成像的几何模型,几何模型的参数就是相机的参数,在大多数条件下,
这些参数需要通过实验和计算,而这个求解过程就是相机标定。
- 标定目的
视觉识别,测量,然后就去拍照,在对数字图像做各种处理,如颜色处理,灰度化,滤波,边缘检测,霍夫变换,最后得到的希望的的特征,不过请注意,进行到这一步我们仅仅是得
到感兴趣的像素而已, 但怎么将像素转换到现实世界中呢?换句话说,究竟怎么样对这些仅存予图像的东西进行测量,才能得到具有实际意义和适度的数据呢?????
摄像机标定存在的意义就是为了解决这个蛋疼的问题!!!!!
继续看,通过相机标定可以知道以下:
1. 外参数矩阵。告诉现实世界点(世界坐标系)是怎么经过旋转和平移,然后落到另一个现实世界点(摄像机坐标系)上;
2. 内参数矩阵。告诉上述那个点在1的基础上,是如何经过摄像机的镜头,并通过针孔成像和电子转化成为像素点;
3. 畸变矩阵。告诉为什么没有落在理论的位置,还TMD的产生了一点偏差(偏移和变形)。
4. 结构参数。告诉有摄像机怎么相对于做相机经过旋转和平移到达现在位置。通过结构参数,便可以把左右相机获取的图像的每一个像素点之间的关系用数学语言描述,保证两个相机
处于我们渴求的状 态。
总的来说:谁相机标定通过寻找对象在图像和现实世界的转换数学关系,并找出其定量的联系,从而实现从图像中测量出实际数据的目的!
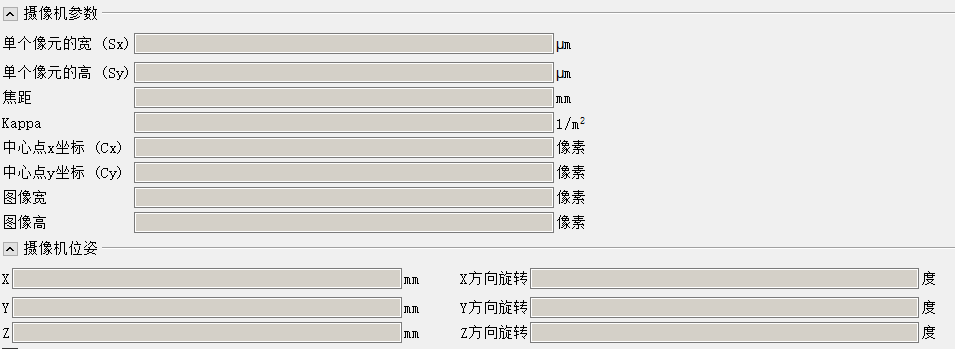
标定可以获取相机内参,外参,畸变系数: