

相机标定 <1>
相机标定原理
1. 相机标定
机器视觉中,确定某物体表面某点的几何位置与其在图像中对应的位置之间关系,必须建立相机成像的几何模型,而求取几何模型参数的过程叫做标定。通过定义可知,所谓标定就是求取坐标系之间转换对应关系。现求出这种对应关系,先了解集中坐标系。
2. 四种坐标系
-
世界坐标系(World coordinate system)
世界坐标系(world coordinate)(xw,yw,zw)(xw,yw,zw),也称为测量坐标系,是一个三维直角坐标系,以其为基准可以描述相机 和待测物体的空间位置。世界坐标系的位置可以根据实际情况自由确定。
-
相机坐标系(Camera coordinate system)
相机坐标系(camera coordinate)(xc,yc,zc)(xc,yc,zc),也是一个三维直角坐标系,原点位于镜头光心处,x、y轴分别与相面的两边平行,z轴为镜头光轴,与像平面垂直
-
像素坐标系(Pixel coordinate system)
像素坐标系uov是一个二维直角坐标系,反映了相机CCD/CMOS芯片中像素的排列情况。原点O位于图像的左上角,uu轴、vv轴分别于像面的两边平行。像素坐标系不利于坐标变换,因此需要建立图像坐标系XOY,
其坐标轴的单位通常为毫米(mm),原点是相机光轴与相面的交点(称为主点),即图像的中心点,XX轴、YY轴分别与uu轴、vv轴平行。故两个坐标系实际是平移关系,即可以通过平移就可得到。
-
像平面坐标系
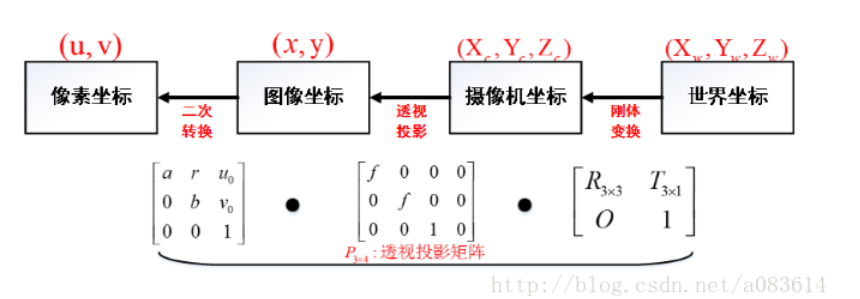
3. 坐标系之间转换关系
像平面坐标系转化像素坐标系(其中UOV为像素坐标系,XOY像平面坐标系)
下图是两坐标系互相垂直情况
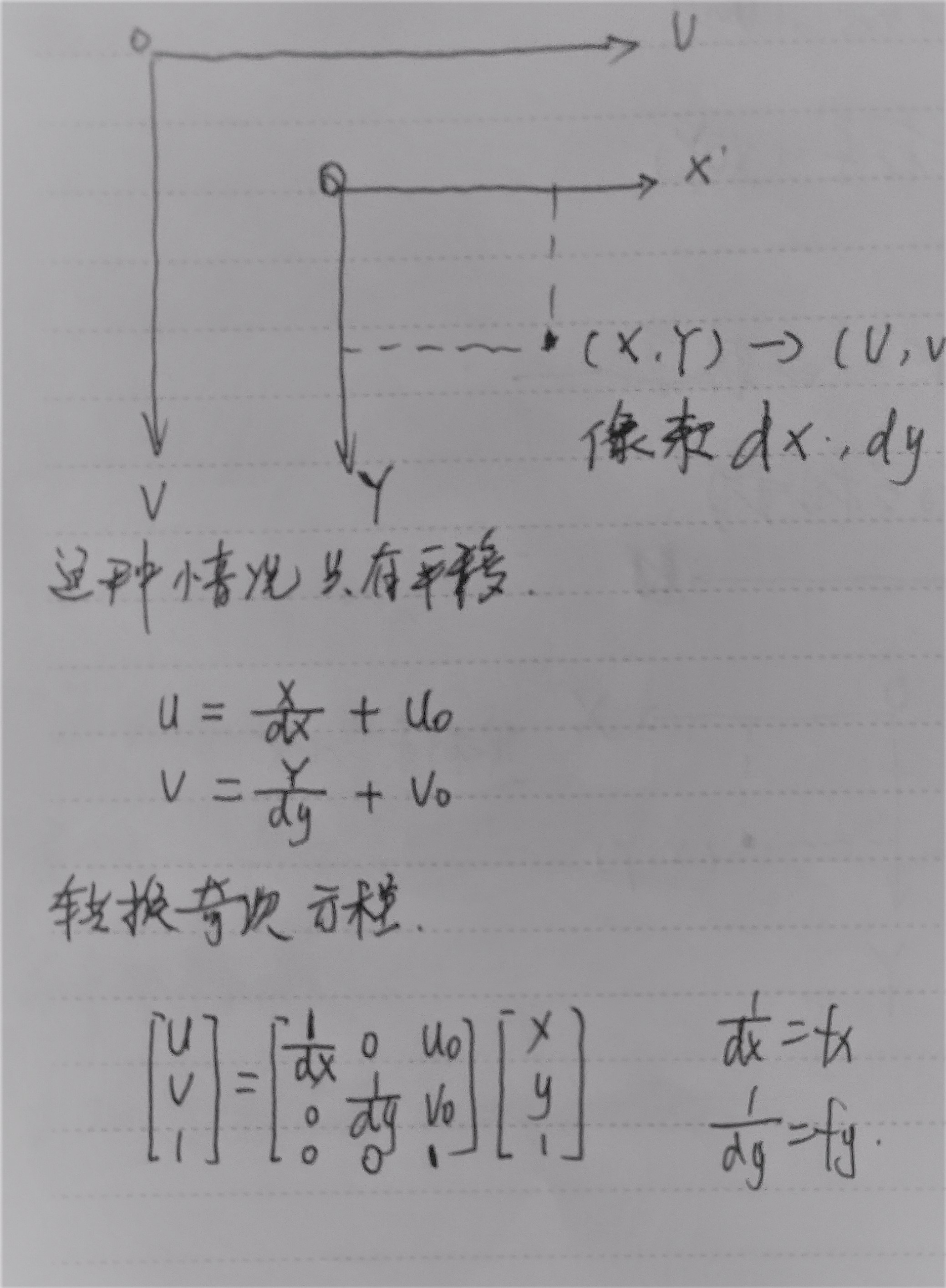
下面是两坐标系不垂直情况

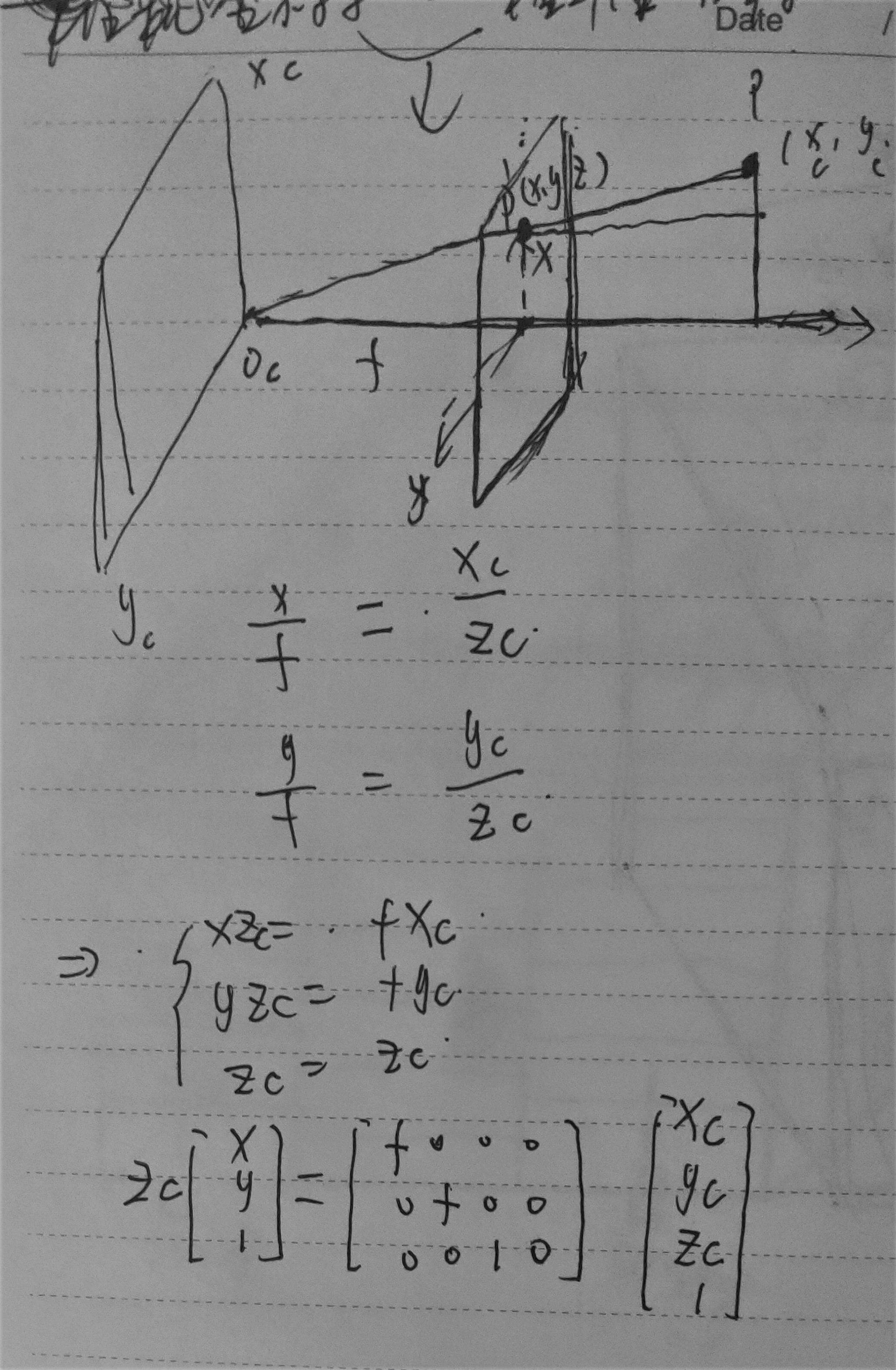
相机坐标系转化相平面坐标系
世界坐标系转化相机坐标系
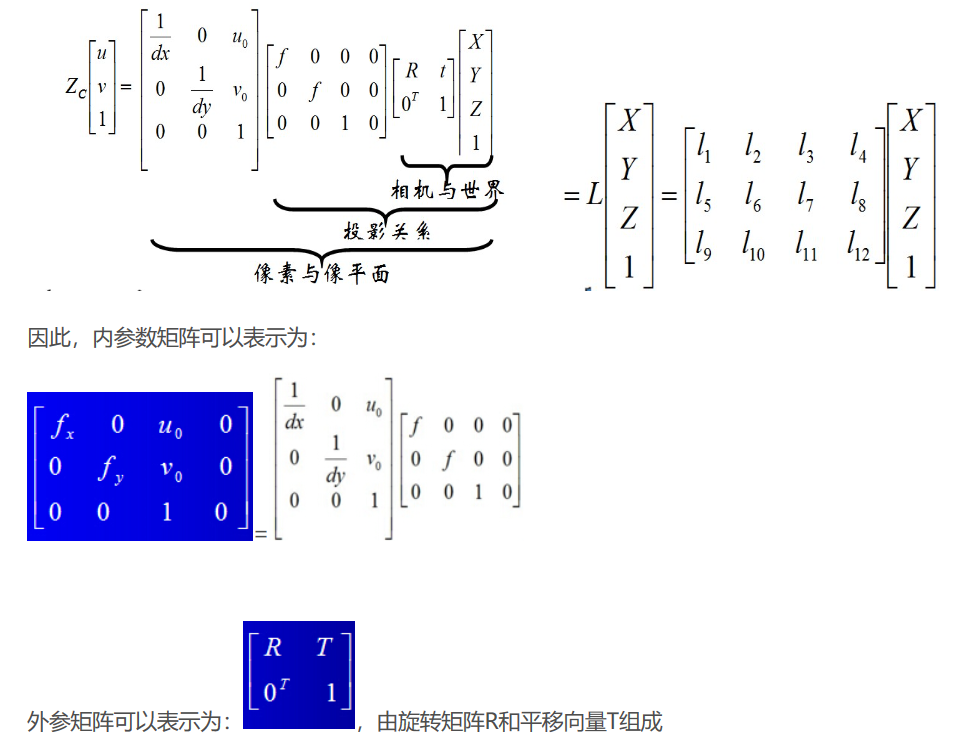
对于任意的两个坐标系,我们都可以通过旋转和平移变换来进行转换,其中旋转变换可以通过分别绕x,y,z轴的旋转来实现并得到旋转矩阵。为了便于矩阵运算,我们引入齐次坐标系,于是世界坐标系到相机坐标系的转换矩阵为:(https://blog.csdn.net/chentravelling/article/details/53558096)这篇博客介绍了RT矩阵由来。
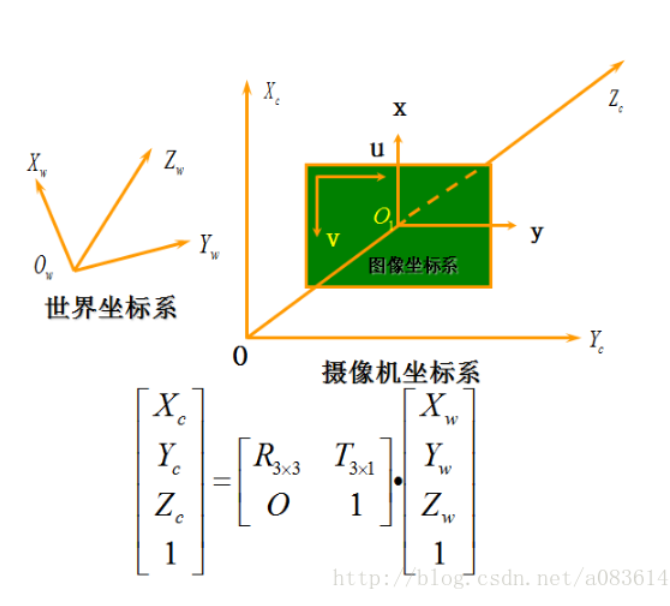
R是旋转矩阵3 X 3,T是平移矩阵3 X 1;
公式合并即可求出内部参数!!
详细可参考:https://blog.csdn.net/waeceo/article/details/50580607
