

【新阁教育】爱普生机器人建立工具坐标系教程
本文主要针对爱普生4轴机器人如何建立工具坐标系及其验证进行详细阐述。
1、建立与机器人之间的通信:通过EPSON RC+软件,点击设置>>电脑与控制器通信,实现PC与机器人之间的通信,这里可以采用USB或者以太网通信。

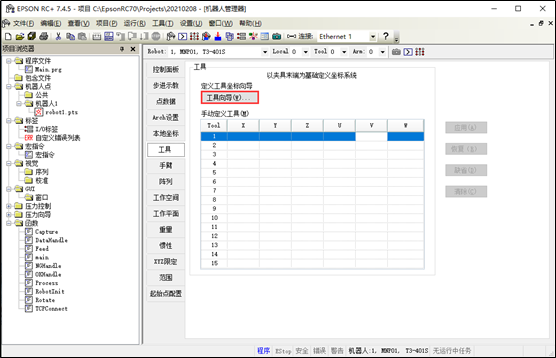
2、打开工具向导:通过EPSON RC+软件,点击工具>>机器人管理器>>工具>>工具向导,打开工具向导。
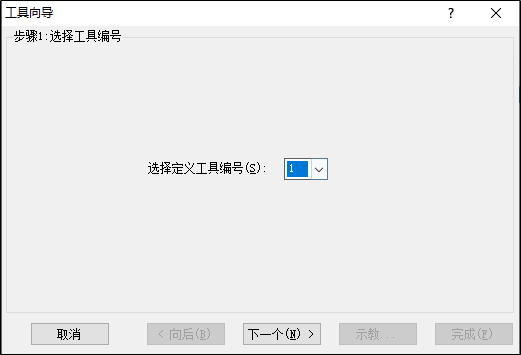
3、选择工具编号:这里可以选择一个需要创建的工具编号,本例为工具1。
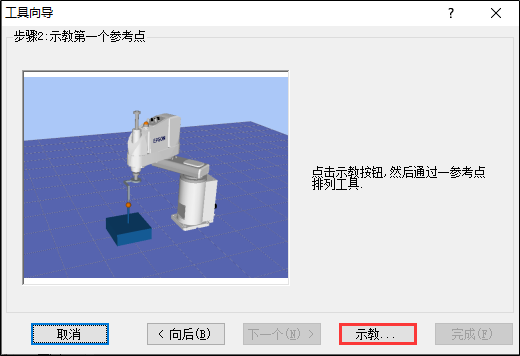
4、示教第一个参考点:直接点击示教即可。
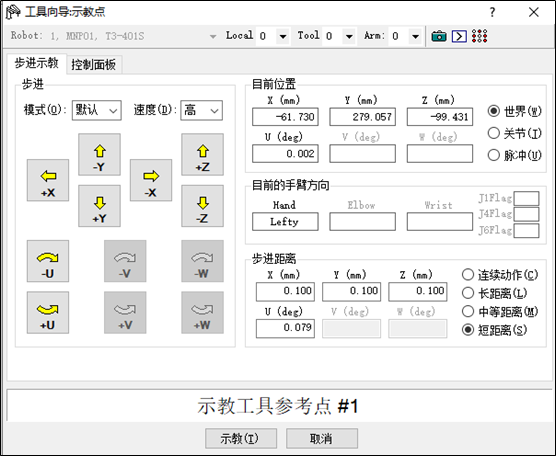
5、工具向导,示教参考点1:在步进示教界面,控制U轴为0°,接着再控制XY,将工具的中心对准特征点,完成后点击示教按钮。
6、示教第二个参考点:直接点击示教即可。
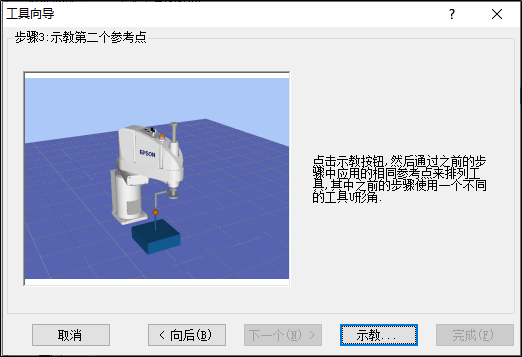
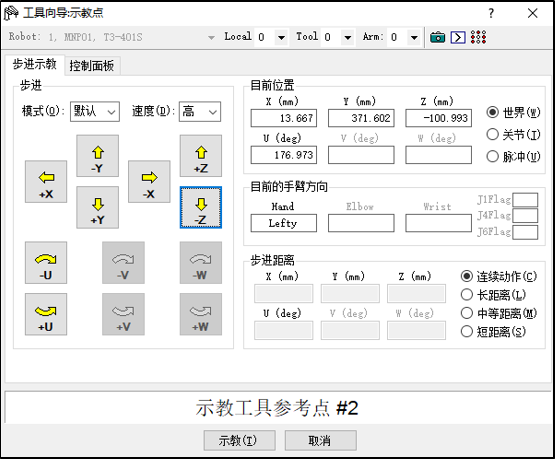
7、工具向导,示教参考点2:在步进示教界面,控制U轴为180°,如果由于机械原因,旋转不了180°也没关系,接着再控制XY,将工具的中心对准特征点,完成后点击示教按钮。
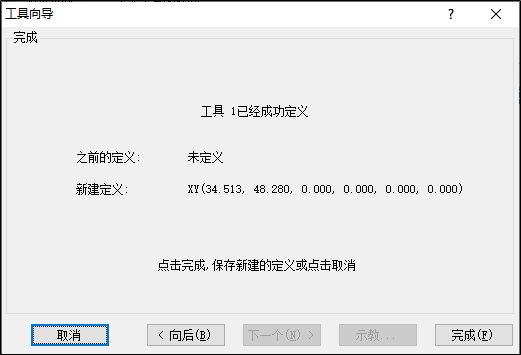
8、示教完成。
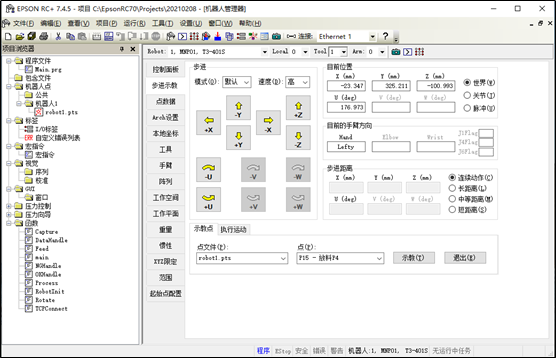
9、工具示教完成后,需要进行验证,在步进示教界面,切换Tool为刚刚示教的工具1,然后旋转U轴,观察工具的中心是否始终对准特征点,如果始终对准,说明该工具可用,如果存在偏移,说明需要重新创建工具。



【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 10年+ .NET Coder 心语,封装的思维:从隐藏、稳定开始理解其本质意义
· .NET Core 中如何实现缓存的预热?
· 从 HTTP 原因短语缺失研究 HTTP/2 和 HTTP/3 的设计差异
· AI与.NET技术实操系列:向量存储与相似性搜索在 .NET 中的实现
· 基于Microsoft.Extensions.AI核心库实现RAG应用
· TypeScript + Deepseek 打造卜卦网站:技术与玄学的结合
· 阿里巴巴 QwQ-32B真的超越了 DeepSeek R-1吗?
· 【译】Visual Studio 中新的强大生产力特性
· 10年+ .NET Coder 心语 ── 封装的思维:从隐藏、稳定开始理解其本质意义
· 【设计模式】告别冗长if-else语句:使用策略模式优化代码结构