

图论浅谈
存图
存图一般分为两种,邻接矩阵与邻接表(链式前向星)。
邻接矩阵
邻接矩阵比较简单,就是定义一个二维数组 \(E\),然后 \(E[i][j]\) 就是代表有一条有向边 \(i \rightarrow j\)。
空间复杂度为 \(O(n^2)\),\(n\) 为节点数。
示例代码如下:
struct MatrixGraph{
int matrix[100][100];
MatrixGraph(){
memset(matrix, 0x3f, sizeof(matrix));
}
void add(int from,int to,int weight){
matrix[from][to] = weight;
}
void add_undirected(int from,int to,int weight){
matrix[from][to] = weight;
matrix[to][from] = weight;
}
};
其中 add 代表添加一个有向边 \(from \rightarrow to\),而add_undirected 代表一个无向边。
邻接表
这里以链式前向星为例。
它存的是边,而边有三个属性 next , to , weight ,分别代表边的终点、边同起点的下一条边的存储位置、边权。
示例代码如下:
// 链式前向星
struct Graph{
struct Edge{
int next;
int to;
int weight;
} edges[100];
int head[100];
int edge_count;
Graph(){
edge_count = 0; // 初始化
}
void add(int from,int to,int weight){
edges[++edge_count].next=head[from];
edges[edge_count].to=to;
edges[edge_count].weight=weight;
head[from]=edge_count;
}
void add_undirected(int from,int to,int weight){
add(from,to,weight);
add(to,from,weight);
}
};
直接存储边
这个不用说了,上代码!
// 直接存边
struct EdgeGraph{
struct Edge{
int from;
int to;
int weight;
} edges[100];
int edge_count;
EdgeGraph(){
edge_count = 1;
}
void add(int from,int to,int weight){
edges[edge_count].from=from;
edges[edge_count].to=to;
edges[edge_count].weight=weight;
edge_count++;
}
void add_undirected(int from,int to,int weight){
add(from,to,weight);
add(to,from,weight);
}
};
最短路问题
Floyed
适用存图方法:邻接矩阵
多源最短路算法,一次可以求出所有节点之间的最短路。
复杂度比较高,但是常数小,容易实现。
适用于任何图,不管有向无向,边权正负,但是最短路必须存在。(不能有个负环)
时间复杂度为 \(O(n^3)\),\(n\) 为节点数。经过优化的空间复杂度为 \(O(n^2)\)。
用DP的思想,枚举\(x\)到\(y\)的边进行计算。
状态转移方程如下:
\(f[x][y] = min(f[x][y], f[x][k]+f[k][y])\)
代码如下:
void floyed(int** f,MatrixGraph &g,int n){
memcpy(f, g.matrix, sizeof(g.matrix));
for(int k=1;k<=n;k++){
for(int x=1;x<=n;x++){
for(int y=1;y<=n;y++){
f[x][y]=min(f[x][y],f[x][k]+f[k][y]);
}
}
}
}
\(f[x][y]\) 就是从 \(x\) 到 \(y\) 的最短路的权值和(说白了就是距离)
Floyed的应用——传递闭包
如果忽略权重(也就是说,将初始化的 0x3f 改为 0,连接为 1,否则为 0),Floyed的结果就是图上任意两点的连通性,这一操作名为图的传递闭包。
需要把方程改为 f[x][y] |= f[x][k] & f[k][y]。
代码如下:
void transitive_closure(int **f,MatrixGraph &g,int n){
memcpy(f, g.matrix, sizeof(g.matrix));
for(int k=1;k<=n;k++){
for(int x=1;x<=n;x++){
for(int y=1;y<=n;y++){
f[x][y] |= f[x][k] & f[k][y];
}
}
}
}
练手题目链接:洛谷B3611 【模板】传递闭包
参考代码如下:
#include <iostream>
#include <cstdio>
using namespace std;
int n;
int f[200][200];
int main(){
cin>>n;
for(int i=1;i<=n;i++){
for(int j=1;j<=n;j++){
cin>>f[i][j];
}
}
for(int k=1;k<=n;k++){
for(int x=1;x<=n;x++){
for(int y=1;y<=n;y++){
f[x][y] |= f[x][k] & f[k][y];
}
}
}
for(int i=1;i<=n;i++){
for(int j=1;j<=n;j++){
cout<<f[i][j];
putchar(32);
}
cout<<endl;
}
return 0;
}
前置知识——松弛
对边\((u,v)\),松弛操作是 \(dis(v)=min(dis(v),dis(u)+weight(u,v))\)
其实就是DP的选择最优策略。要么不走,要么走(加上权重)。
Dijkstra
Dijkstra,读作/ˈdikstrɑ/!
算法流程
将结点分成两个集合:已确定最短路长度的点(记为 $ S $ 集合)的和未确定最短路长度的点(记为 $ T $集合)。一开始所有的点都属于 $ T $ 集合。(废话)
初始化数组 \(dis[start]=0\) ,其他点的 \(dis\) 均为 $\inf $。
然后重复这些操作:从
$ T \(
集合中,选取一个最短路长度最小的结点,移到\) S$
集合中。
对那些刚刚被加入 $ S $集合的结点的所有出边执行松弛操作。
直到 \(T\)
集合为空,算法结束。
多种实现方式
Dijkstra有许多实现方法。
- 暴力算法,全过程复杂度为 \(O(n^2)\)。
- 二叉堆/优先队列优化,简称堆优,全过程复杂度为 \(O(m \log n)\)。如果使用优先队列,则为 \(O(m \log m)\)
- 线段树优化,优化单点修改,全过程复杂度为 \(O(m \log n)\)。
参考代码
暴力版本(\(1\)为起点)
void dijkstra(int* dis,Graph &g,int n){
const int inf = 0x3f3f3f3f;
for(int i=1;i<=n;i++){
dis[i]=inf;
}
dis[1]=0;
for(int i=1;i<=n;i++){
int u=0;
for(int j=1;j<=n;j++){
if(dis[j]<dis[u]){
u=j;
}
}
if(dis[u]==inf) break;
for(int j=g.head[u];j;j=g.edges[j].next){
int v=g.edges[j].to;
if(dis[v]>dis[u]+g.edges[j].weight){
dis[v]=dis[u]+g.edges[j].weight;
}
}
}
}
堆优版本:
void heap_dijkstra(int start,int *dis,int *vis,Graph &g,int n){
priority_queue<pair<int,int> > q;
for(int i=1;i<=n;i++){
dis[i]=0x3f3f3f3f;
}
dis[start]=0;
q.push(make_pair(0,start));
while(!q.empty()){
pair<int,int> x=q.top();
q.pop();
int u=x.second;
if(vis[u]) continue;
vis[u]=1;
for(int j=g.head[u];j;j=g.edges[j].next){
int v=g.edges[j].to;
if(dis[v]>dis[u]+g.edges[j].weight){
dis[v]=dis[u]+g.edges[j].weight;
q.push(make_pair(dis[v],v));
}
}
}
}
线段树就不打了,毕竟太毒瘤了。
SPFA
SPFA死了,但永垂不朽! 关于这个梗,请看NOI2018 Day 1 T1 归程(洛谷P4768)。
SPFA是Bellman-Ford算法的优化版本。时间复杂度为 $ O(\alpha m) $,其中 \(\alpha\),是常数,一般是 \(2\) ,但在毒瘤题哪里就可能退化为 \(O(nm)\),应只用于有负边权的稀疏图!
有兴趣自己找资料吧,我不讲。
参考代码如下:
void spfa(int start,int *dis,int* vis,Graph &g,int n){
for(int i=1;i<=n;i++){
dis[i]=0x3f3f3f3f;
}
int u,v;
queue<int> q;
q.push(start);
dis[start]=0;
while(!q.empty()){
u=q.front();
q.pop();
for(int j=g.head[u];j;j=g.edges[j].next){
v=g.edges[j].to;
if(dis[v]>dis[u]+g.edges[j].weight){
dis[v]=dis[u]+g.edges[j].weight;
if(!vis[v]){
vis[v]=1;
q.push(v);
}
}
}
}
}
最小生成树
什么是最小生成树
最小生成树(MST)为边权和最小的生成树。
只有连通图才存在生成树。
Kruskal 算法
Kruskal 算法是基于并查集、贪心的简单易写的算法。
步骤如下:
- 把边按照权重排序。
- 枚举排过序的边,如果边的左右两点的祖先不是一个(并查集实现),那么合并它们。
代码如下:
bool _kruksal_cmp(EdgeGraph::Edge a,EdgeGraph::Edge b){
return a.weight<b.weight;
}
int find(int *fa,int x){
if(fa[x]=x){
return x;
}
else{
return fa[x]=find(fa,fa[x]);
}
}
int kruksal(EdgeGraph g,int n){
int fa[n+1];;
for(int i=1;i<=n;i++){
fa[i]=i;
}
sort(g.edges+1,g.edges+g.edge_count,_kruksal_cmp);
int ans=0;
for(int i=1;i<=g.edge_count;i++){
int x=find(fa,g.edges[i].from);
int y=find(fa,g.edges[i].to);
if(x!=y){
ans+=g.edges[i].weight;
fa[x]=y;
}
}
return ans;
}
上面函数返回的总权值。可以用 \(cnt\)统计数量,当大于\(n-1\)时结束。
改的代码如下:
int kruksal2(EdgeGraph g,int n){
int fa[n+1];;
for(int i=1;i<=n;i++){
fa[i]=i;
}
sort(g.edges+1,g.edges+g.edge_count,_kruksal_cmp);
int ans=0;int cnt=0;
for(int i=1;i<=g.edge_count;i++){
int x=find(fa,g.edges[i].from);
int y=find(fa,g.edges[i].to);
if(x!=y){
cnt++;
ans+=g.edges[i].weight;
fa[x]=y;
if(cnt+1==n){
break;
}
}
}
return ans;
}
拓扑排序
介绍
拓扑排序作用在有向无环图(Directed Acyclic Graph,简称DAG)上。
拓扑排序干了这样一件事情:如果图上有一条边 \(u \rightarrow v\),那么排序后 \(u\) 一定在 \(v\) 前。或说是在不破坏DAG内部的顺序的前提下,将DAG拉直成一条链。
比如说下面的图:
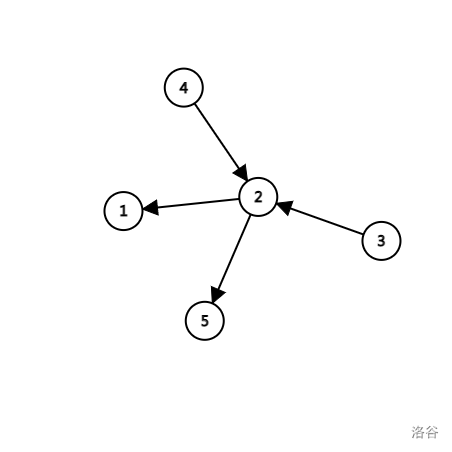
就是一个DAG。它的拓扑排序后的链是:3 4 2 1 5 (答案不唯一)
Kahn算法
Kahn算法用来求解一个DAG的拓扑排序。
步骤
-
首先,先删除所有入度为 \(0\) 的点。如上图,就是 \(3\) 与 \(4\)。
-
重复以上步骤直到图上所有点都被删除,删除的顺序就是拓扑排序的结果。
这个算法用到了一个定理:DAG删点时,整个图仍然是一个DAG。
代码如下:
void _topological_sort_dfs(int u,int *vis,int *stk,int *top,int *fa,Graph &g){
vis[u]=1;
for(int i=g.head[u];i;i=g.edges[i].next){
int v=g.edges[i].to;
if(!vis[v]){
_topological_sort_dfs(v,vis,stk,top,fa,g);
}
}
stk[++(*top)]=u;
}
void topological_sort(int *stk,Graph &g,int n){
int vis[n+1];
int top=0;
int fa[n+1];
for(int i=1;i<=n;i++){
vis[i]=0;
}
for(int i=1;i<=n;i++){
if(!vis[i]){
_topological_sort_dfs(i,vis,stk,&top,fa,g);
}
}
return ;
}
使用 int *stk 来保存结果(其实就是一个栈)
强连通分量
定义
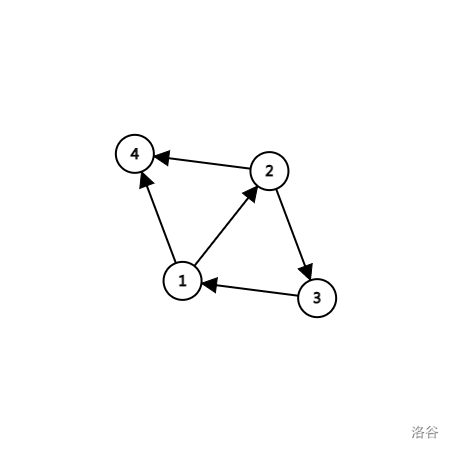
如果在有向图中,\(u\) 与 \(v\) 存在一种路径,而 \(v\) 与 \(u\) 也存在一条路径,那么称\(u\)与\(v\)强连通。
如果任意两点都强连通,那么称这个图为强连通图。
如果一个非强连通图中存在一个最大的强连通图,那么称这个子图为 强连通分量。
比如说下图,1与2强连通,\(Edge\{1,2,3\}\)是强连通图,也是整个图的强连通分量。
Tarjan算法
tarjan算法基于图的深度优先搜索(DFS)。每一个可能的强联通分类都是搜索树中的一棵子树。
搜索时,把当前搜索树中未处理的节点放入一个栈,回溯时判断栈顶到栈中的节点是否为一个强连通分量。
一些定义
\(DFN(u)\) :搜索到节点 \(u\) 时的次序。(换句话说,就是搜索的时间戳)。
\(LOW(u)\) 为 \(u\) 或 \(u\) 的子树能够追溯到的最早的栈中节点的次序。
步骤
-
当第一次搜索到点u时 \(DFN[u]=LOW[u]=time\) ;
-
每搜索到一个点,就把该点压入栈(顶);
-
当u和v有边相连时:如果v不在栈中(树枝边),搜索 \(v\) 节点,并且 \(LOW[u] = min\{LOW(u),LOW(v)\}\) ;如果 \(v\) 在栈中(前向边/后向边),此时 \(LOW[u] = min\{LOW[u],DFN[v]\}\) 。
-
当 \(DFN[u]=LOW[u]\) 时 ,将它以及在它之上的元素弹出栈,此时,弹出栈的结点就构成一个强连通分量;
-
继续搜索,直到整张图搜索完毕。
这个算法,每条边只会遍历一次,每个点也只会遍历一次,因此如果令边数为 \(n\),点数为 \(m\),那么Tarjan算法的时间复杂度就是 \(O(n+m)\)。是一种非常高效的算法。
代码
#define MEMZERO(a) memset(a,0,sizeof(a))
void tarjan(int u,Graph &g,int N){
int dfn[N], low[N], dfncnt=0, s[N], in_stack[N], tp=0;
int scc[N], sc=0;
int sz[N];
MEMZERO(dfn);
MEMZERO(low);
MEMZERO(s);
MEMZERO(in_stack);
MEMZERO(scc);
MEMZERO(sz);
for(int i=g.head[u];i;i=g.edges[i].next){
const int &v=g.edges[i].to;
if(!dfn[v]){
tarjan(v,g,N);
low[u]=min(low[u],low[v]);
}
else if(in_stack[v]){
low[u]=min(low[u],dfn[v]);
}
}
if(dfn[u]==low[u]){
++sc;
while(s[tp]!=u){
scc[s[tp]]=sc;
sz[sc]++;
in_stack[s[tp]]=0;
--tp;
}
scc[s[tp]]=sc;
sz[sc]++;
in_stack[s[tp]]=0;
--tp;
}
}
Kosaraju算法
Kosaraju算法也是基于DFS的实现。
实现方法
跑两个DFS。
第一个DFS:选取任意顶点作为起点,遍历所有未访问过的顶点,并在回溯之前给顶点编号。
第二个DFS:对于反向后的图,以标号最大的顶点作为起点开始 DFS。这样遍历到的顶点集合就是一个强连通分量。对于所有未访问过的结点,选取标号最大的,重复上述过程。
强连通分量已经找出,时间复杂度也是 \(O(n+m)\)。
例题大全
P5960 【模板】差分约束算法
题面
给出一组包含 \(m\) 个不等式,有 \(n\) 个未知数的形如:
的不等式组,求任意一组满足这个不等式组的解。
分析
乍一看以为是数学题,但看标签可知道是图论。
解一个方程组,每个方程都满足 \(x_i - x_j \le c_k\),这个式子很不友好,可以化成 \(x_i \le x_j + c_k\),然后就变成了一个最短路了,把 \(j\) 向 \(i\) 连一条有向边就可以了。
然后再建一个节点 \(0\) ,连向所有边,边权为 \(0\)。以起点为 \(0\) 跑最短路。如果有负环就输出 NO就可以了。答案是 dis 数组。
由于可能有负权边,所以用SPFA算法(是的,他没死),最坏复杂度为 \(O(nm+m)=O(nm)\) 。
此即所谓差分约束算法。
哦对了,判断负权边的SPFA代码在下面,自助领取。
int tot[5005];
bool spfa(int start,int *dis,int* vis,Graph &g,int n){
int u,v;
queue<int> q;
q.push(start);
dis[start]=0;
vis[start]=1;
while(!q.empty()){
u=q.front();
vis[u]=0;
q.pop();
for(int j=g.head[u];j;j=g.edges[j].next){
v=g.edges[j].to;
if(dis[v]>dis[u]+g.edges[j].weight){
dis[v]=dis[u]+g.edges[j].weight;
if(!vis[v]){
vis[v]=1;
tot[v]++;
if(tot[v]==n+1){
return false;
}
q.push(v);
}
}
}
}
return true;
}
代码
#include <iostream>
#include <queue>
#include <cstring>
using namespace std;
struct Graph{
struct Edge{
int next;
int to;
int weight;
} edges[10005];
int head[5005];
int edge_count;
Graph(){
edge_count = 0; // 初始化
}
void add(int from,int to,int weight){
edges[++edge_count].next=head[from];
edges[edge_count].to=to;
edges[edge_count].weight=weight;
head[from]=edge_count;
}
void add_undirected(int from,int to,int weight){
add(from,to,weight);
add(to,from,weight);
}
};
int n,m;
Graph g;
int tot[5005];
int Dis[5005];
int Vis[5005];
bool spfa(int start,int *dis,int* vis,Graph &g,int n){
int u,v;
queue<int> q;
q.push(start);
dis[start]=0;
vis[start]=1;
while(!q.empty()){
u=q.front();
vis[u]=0;
q.pop();
for(int j=g.head[u];j;j=g.edges[j].next){
v=g.edges[j].to;
if(dis[v]>dis[u]+g.edges[j].weight){
dis[v]=dis[u]+g.edges[j].weight;
if(!vis[v]){
vis[v]=1;
tot[v]++;
if(tot[v]==n+1){
return false;
}
q.push(v);
}
}
}
}
return true;
}
int main(){
memset(Dis,0x3f,sizeof(Dis));
ios::sync_with_stdio(false);
cin.tie(0);
cout.tie(0);
cin>>n>>m;
for(int i=1;i<=n;i++){
g.add(0,i,0); // 初始化
}
for(int i=0;i<m;i++){
int from,to,weight;
cin>>to>>from>>weight;
g.add(from,to,weight);
}
bool res = spfa(0,Dis,Vis,g,n); // 跑一遍差分约束
if(!res)
cout<<"NO";
else{
for(int i=1;i<=n;i++)cout<<Dis[i]<<" ";
}
cout<<endl;
return 0;
}
