


K-Shape 高效且准确的时间序列的聚类方法
基本信息
- 论文题目:k-Shape: Efficient and Accurate Clustering of Time Series
- 论文地址:https://dl.acm.org/doi/10.1145/2949741.2949758
- 相关源码:https://github.com/tslearn-team/tslearn/
- 用法示例:https://tslearn.readthedocs.io/en/stable/auto_examples/clustering/plot_kshape.html#sphx-glr-auto-examples-clustering-plot-kshape-py
这是一篇发表于2015年SIGMODE数据管理国际顶会的论文,它主要针对时序数据的聚类问题,提出了K-Shape方法。与以往的方法相比,它优化了距离计算方法,质心计算方法,还引入了提取频域特征方法,以提升效率。
作者认为它是一种独立于领域、高精度、高效率的时间序列聚类方法。
我觉得相对于传统方法,它聚类效果更好;相对于DTW类方法,效果稍差,但速度快很多。毕竟从原理来看,K-Shape只考虑了纵向拉伸和横向平移,而DTW还考虑了横向拉伸。
算法
K-Shape原理和K-means相似,不同在于它改进了距离计算方法,并优化了质心计算方法。一方面支持振幅缩放和平移不变性,另一方面计算效率也比较高,并且不用手动设置参数,便于扩展到更多领域。
距离算法
距离算法用于计算两组时序数据的差异,其中的核心问题是如何处理时序数据的形变,论文中的图-1 展示的心电图数据被分为A/B两类:

其中A类的特点是:上升->下降->上升,而B类的特点是:下降->上升。图-1 的右下图展示了理想的建模效果,它识别到了相同的模式,而忽略了幅度和相位的差异。人们也更倾向使用这种方法计算距离,很多时候甚至认为距离计算方法比聚类方法更加重要。一般来说,支持振幅缩放和平移不变性的方法,计算成本较高,难以对大数据量建模。
其它距离计算方法
K-Shape之前的主流距离算法如下:
- ED: 欧几里得距离,最简单效率也最高,直接计算两个时间序列的距离,不考虑横向纵向缩放平移等问题。
- DTW: 动态时间规整,考虑缩放和平移的情况,可用于比较长短不一的序列,效果好但资源占用高。
- cDTW: DTW的限制版本,它将变化限制在一定的“带”之内,有效地提高了DTW的效率和准确率。

互相关方法
K-Shape用互相关方法计算两个时间序列的距离。假设有X和Y两个时间序列,序列长度均为m。为实现平移不变性,Y不变,一步一步划动X,并计算每一步X与Y的差异。


如上图所示:假设绿色区域为Y,白色区域为划动的X,每一行s(step)向前划动一步,序列长度为m=4,s∈(-3,3)共7种取值,w是所有移动的可能性2m-1=7次,w-m=s=k,也就是下面公式中的对齐位置(对齐逻辑贯穿整个算法)。
定义互相关系数CC:

利用R来计算x和y在每一步的相似度,在对的上(在X,Y中都存在)的位置计算点积,最终R是有效区域的点积之和(对每个对上的小块加和)。可以说,R越大两个序列越相似。
由于对比的每个子序列振幅不同,块数也不同,所以在对比时需要进行归一化,归一化方法有三种, 第三种使用了互相关方法,效果最好。

归一化效果如下图所示:
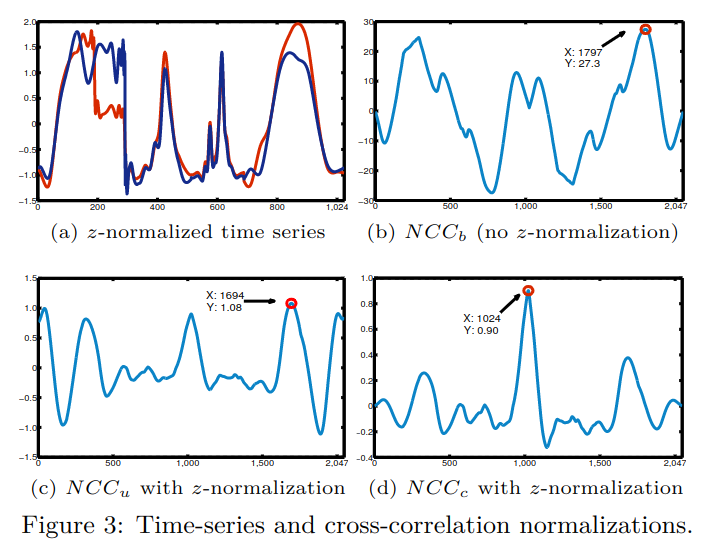
其中图(a)使用z-normalization只做了对振幅的归一化,没有平移,可见在上述情况下,不平移(正对上)时对齐效果最好。从(b)(c)(d)可以看到:(d)图使用第三种方法,在最中间的点上相似度值最大(s=0时),即正对上的时候,其相似度最大,这与(a)呈现出的效果一致。而(b)(c)都认为最相似的情况出现在右侧,这明显不太对。

文中定义了基于形态的距离SBD(Shape-based distance),块重叠越多形状越像CC越大,对比所有可能位置的相似度值,取最相似的max(CC),然后用1-max(CC)得到SBD,也就是说形状越相似,距离SBD越小,归一化后的NCC值在[-1,1]之间,因此,SBD值在[0,2]之间。
可以看到,用以上方法时间在序列较长时复杂度比较高,当序列较长时,计算量也会很大,为解决这一问题,作者提出使用傅里叶变换将序列由时域转到频域再比较,以节约计算量。
计算质心
定义了距离之后,还需要根据距离逻辑来调整质心算法。

从图-4 可以看到:时序数据的质心也是一条时序变化线,图中的蓝色线使用均值方法(计算每个点的均值)来计算质心;由于错位,波峰和波谷被拉成了直线,因此不能正确地表达形状趋势。
K-Shape使用基于SBD的方式计算质心。

该公式的目标是寻找μk*,使质心μk与该簇Pk中各条序列xi的相似度NCC最大。

算法一:先使用SBD() 函数计算dist和y',dist是时序x,y之间的距离,y'是y中与x最匹配的子段。使用这种方法解决了波峰波谷对不齐,以致相互抵消的问题。
然后用基于线性代数方法,将公式13展开成公式15:

最终可利用瑞利商公式加以简化:

瑞利商R(M,x)的一个重要的性质是:R的最大值等于矩阵M最大的特征值,最小值等于矩阵M最小的特征值。此时,就不用太考虑R(M,x)中的x(即本问题中的uk)。公式13被简化成以下算法:

算法二:ShapeExtraction()根据簇的当前质心C和簇内的所有点X,计算更合理的质心C'。
line2: 遍历簇内所有的点X(i)
line3: 计算各点与质心的距离dist以及其中与质心最为相似的片断x'
line4: 将最为相似的片断加入X'
line5: X'转置与X相乘生成一个方阵(X的平方)
line6: 创建用于正则化的矩阵Q
line7: 正则化后生成矩阵M
line8: 取矩阵M对应最大特征值时的特征向量,以实现对X'的特征抽取
(以上说明为个人理解,不一定对,仅供参考)
基于形状的时序聚类
最终的聚类方法通过迭代实现,每次迭代分为两步:第一步重新计算质心,第二步根据每个序列与新质心的距离将它们重新分配到不同的簇中;一直循环迭代到标签不再变化为止。
算法三:聚类的完整过程由 k-Shape() 实现:

其中X是所有序列,k是簇的个数,IDX是标签。
line3: 在标签稳定前&迭代次数不超过100次的条件下,不断迭代
line4-10:根据簇中的元素重新计算每个簇的质心C
line11-line17:计算每个序列与各个质心的距离,并将它分配到新的簇中(重新打标签)。
时间复杂度
K-Shape算法每次迭代所需时间为:
O(max{n·k·m·log(m), n·m^2, k·m^3})
其中n是实例个数,k是簇个数,m是序列长度。可见,该算法大部分的计算代价依赖于时间序列的长度m。然而,这个长度通常比时间序列的数目小得多,因此,对m的依赖不是瓶颈。在m非常大的极少数情况下,可以使用分段或降维方法来有效地减小序列的长度。
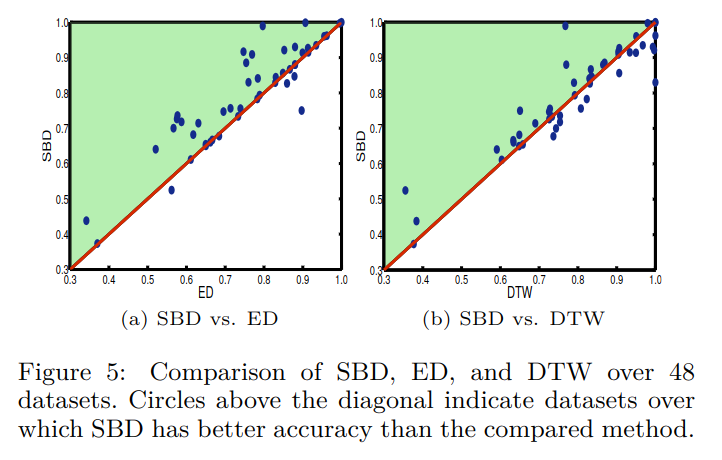
模型效果
图-5对比了K-Shape、ED和DTW模型效果,可以看到绝大多数情况下,SBD好于ED,部分情况下SBD好于DTW。但SBD比DTW好在它速度更快。


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 阿里最新开源QwQ-32B,效果媲美deepseek-r1满血版,部署成本又又又降低了!
· 开源Multi-agent AI智能体框架aevatar.ai,欢迎大家贡献代码
· Manus重磅发布:全球首款通用AI代理技术深度解析与实战指南
· 被坑几百块钱后,我竟然真的恢复了删除的微信聊天记录!
· AI技术革命,工作效率10个最佳AI工具