一、空间直线方程
1.1 一般方程
空间直线可以看成成两个平面的交线,设两个平面方程分别为A1x+B1y+C1z+D1=0 和 A2x+B2y+C2z+D2=0,则直线l的一般方程可以表示为:
{A1x+B1y+C1+D1=0A2x+B2y+C2+D2=0
1.2 点向式
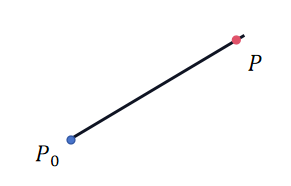
设直线方向向量为v=(m,n,t),直线上一点P0:(x0,y0,z0),则任意点P:(x,y,z)可以表示为 P=kP0,所以直线也可以表示为:
x−x0m=y−y0n=z−z0t=k
1.3 参数式
点向式经过简单变形即可得到:
⎧⎪⎨⎪⎩x=x0+mky=y0+nkz=z0+tk
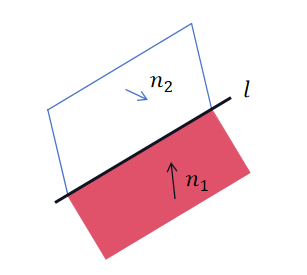
1.4 平面法线叉乘表示
设两平面法线分别为:n1=(x1,y1,z1) 和 n2=(x2,y2,z2),则直线的方向向量v(i,j,k)可以表示为:
v=n1×n2=∣∣
∣∣ijkx1y1z1x2y2z2∣∣
∣∣
在到直线上取一点即可表示直线。
二、公式推导
这里参考链接1给出基于最小二乘法拟合直线的推导,设直线点向式方程为:x−x0m=y−y0n=z−z0t,则转换后可以得到
{x=mt(z−z0)+x0=k1z+b1y=nt(z−z0)+y0=k2z+b2
其中K1=mt,b1=x0−mtz0,k2=nt,b2=y0−ntz0。
所以空间直线可以看作
{x=k1z+b1y=k2z+b2
两个平面相交,因此对空间之间拟合就可以转换为对这两个平面的拟合,假设有n个点(x1,y1,z1),(x2,y2,z2),...,(xn,yn,zn),则可以得到这些点和两个平面的残差的平方和为:
{Q1=∑ni=1(xi−k1zi−b1)2Q2=∑ni=1(yi−k2zi−b2)2
依据最小二乘法有:MinQ1 和 MinQ2,因此分别对k1,b1,k2,b2求导,然后令导数为0可以得到:
⎧⎪
⎪
⎪
⎪
⎪⎨⎪
⎪
⎪
⎪
⎪⎩∑ni=12(xi−k1zi−b1)(−zi)=0∑ni=12(xi−k1zi−b1)(−1)=0∑ni=12(yi−k2zi−b2)(−zi)=0∑ni=12(yi−k2zi−b2)(−zi)=0
依据第一个式子有:
∑ni=1(−xizi−k1z2i+bizi)=0
==>
k1=∑ni=1xizi−∑ni=1bizi∑ni=1z2i
依据第二个式子有:
b1=∑ni=1xi−k1∑ni=1zin
将b1代入k1中可以得到:
k1=n∑ni=1xizi−∑ni=1xi∑ni=1zin∑ni=1z2i−∑ni=1zi∑ni=1zi
同理可以得到:
k2=n∑ni=1yizi−∑ni=1yi∑ni=1zin∑ni=1z2i−∑ni=1zi∑ni=1zi
b2=∑ni=1yi−k2∑ni=1zin
求出k1,k2,b1,b2后就可以算出直线的方向向量v=(m,n,t),令t=1,则m=k1,n=k2,所以v(k1,k2,1),还可以求出直线上一个点p(x,y,z) ,令z=1,则x=k1+b1,y=k2+b2,所以点坐标可以表示为:p(k1+b1,k2+b2,1)。
三、代码实现
double FitLine(const std::vector<Vector3>& pointArray, Vector3& dir, Vector3& pt)
{
core::Vector3 center = core::Vector3(0.0, 0.0, 0.0);
int n = pointArray.size();
for (const core::Vector3& pt : pointArray) {
center += pt;
}
double sumXZ = 0.0, sumYZ = 0.0, sumZ2 = 0.0;
for (const core::Vector3& pt : pointArray) {
sumXZ += pt.x() * pt.z();
sumYZ += pt.y() * pt.z();
sumZ2 += pt.z() * pt.z();
}
double den = n * sumZ2 - center.z() * center.z();
double k1 = (n * sumXZ - center.x() * center.z()) / den;
double b1 = (center.x() - k1 * center.z()) / n;
double k2 = (n * sumYZ - center.y() * center.z()) / den;
double b2 = (center.y() - k2 * center.z()) / n;
dir = core::Vector3(k1, k2, 1.0);
dir.Normalize();
double z = 1.0;
double x = k1 + b1;
double y = k2 + b2;
pt = core::Vector3(x, y, 1.0);
return 0.0;
}
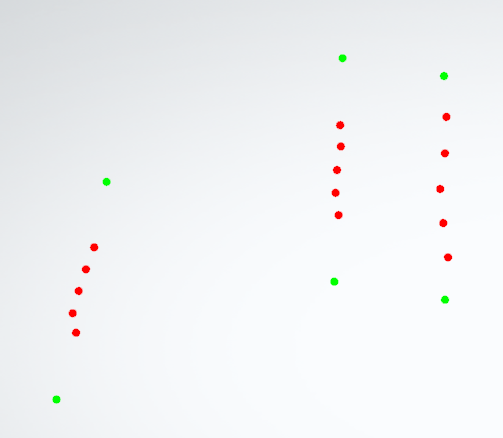
四、效果
下面是拟合的效果,红色点是输入散点,绿色点表示直线上的两个点。
五、参考资料
https://www.doc88.com/p-8189740853644.html




【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 阿里最新开源QwQ-32B,效果媲美deepseek-r1满血版,部署成本又又又降低了!
· 开源Multi-agent AI智能体框架aevatar.ai,欢迎大家贡献代码
· Manus重磅发布:全球首款通用AI代理技术深度解析与实战指南
· 被坑几百块钱后,我竟然真的恢复了删除的微信聊天记录!
· 没有Manus邀请码?试试免邀请码的MGX或者开源的OpenManus吧