
cube spline---三次样条插值
插值是离散函数逼近的重要方法,利用它可通过函数在有限个点处的取值状况,估算出函数在其他点处的近似值。与拟合不用经过每个已知点不同,插值需要经过每个已知点,另外并不是阶数越高越好,因为高阶插值容易出现龙格现象,即插值后在区间两端点处波动极大,产生明显的震荡。三次样条插值作为一种常见的插值方法,这里记录一下其基本概念及求解过程。
一、基本概念
设在区间上存在个已知数据点如下,其把分成了个子区间,
如果函数满足以下三个条件,则称为关于节点的三次样条函数。
- 在每个子区间上都是一个不超过3次的多项式,即 ;
- 在整个区间上连续且光滑,即一阶导数和二阶导数存在且连续;
- 满足插值条件,即。
二、求解过程
2.1 获取方程组
个子区间中每一个都有四个未知数,所以共有个未知参数需要求解。
插值条件
曲线在整个区间上所有点都满足插值条件,所以,依此可得到个方程。
曲线连续
曲线在整个区间上连续,表明在端点处两边函数值相等,即:,其等价于,这里可得个方程。
曲线光滑
曲线在整个区间上光滑,表明在端点两边的一阶导数和二阶导数存在且相等,即
其等价于
共个方程。
区间左右两端点特性
由2.1---2.3一共可以得到个方程,要求解4n个未知数,还需要至少两个方程,所以这里可以考虑在两端点处的特性,加上边界处这两个方程可以对个参数进行求解。一般有三种边界条件:自然边界(Natural Spline),固定边界(Clamped Spline),非节点边界(Not-A-Knot Spline)。
-
自然边界
指定端点二阶导数为0,即。 -
固定边界
人为指定端点一阶导数,这里分别定为和,即。 -
非节点边界
强制第一个插值点的三阶导数值等于第二个点的三阶导数值,最后第一个点的三阶导数值等于倒数第二个点的三阶导数值. 即。
2.2 方程推导
由可得其各阶导数如下:
1、由可得:
,化简可得:
2、由可得:
,令,则可简写为
3、由可得:
所以
4、由可得
通过(2)(3)(4)式可知存在某种关系,为了方便求解,这里作以下变换,将三个参数变换为求解一个参数。
由(4)式可知:
, 令,则:
由(2)式可知:
,化简可得:
将代入(3)式可知:
通过以上推导可知关于的一个方程组,维度为,再考虑边界条件便可以得到个方程,进而进行求解。
自然边界
由可知,因此方程组可以写成以下形式
固定边界
由可知:
变形可得:
由可知:
所以:
因此方程组的系数矩阵可以改写为
非节点边界
由于且,所以:
,另外由,所以
变形可得:
因此方程组的系数矩阵可以改写为
三、算法总结
-
步骤1:分区间
将数据分成不同子区间 -
步骤2:计算步长
计算步长 -
步骤3:求解方程组获得
-
步骤4:计算每个子区间的参数
-
步骤5: 得到每个区间样条函数
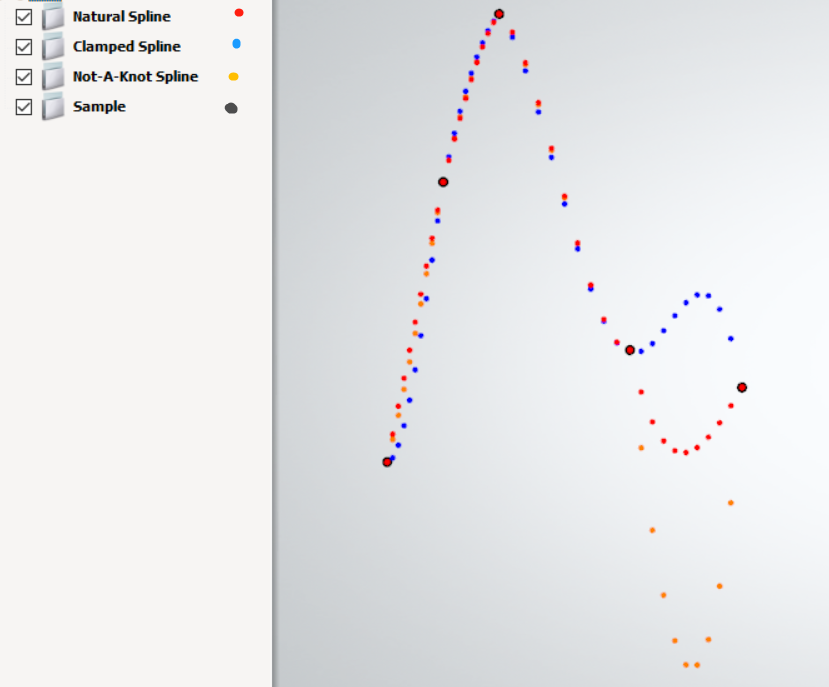
四、示例结果
样本在不同边界情况下插值效果如下:
五、代码实现
参考三次样条插值(Cubic Spline Interpolation)及代码实现(C语言)
点击展开代码
#define S_FUNCTION_NAME cubic
#define S_FUNCTION_LEVEL 2
#include "simstruc.h"
#include "malloc.h" //方便使用变量定义数组大小
static void mdlInitializeSizes(SimStruct *S)
{
/*参数只有一个,是n乘2的定点数组[xi, yi]:
* [ x1,y1;
* x2, y2;
* ..., ...;
* xn, yn;
*/
ssSetNumSFcnParams(S, 1);
if (ssGetNumSFcnParams(S) != ssGetSFcnParamsCount(S)) return;
ssSetNumContStates(S, 0);
ssSetNumDiscStates(S, 0);
if (!ssSetNumInputPorts(S, 1)) return; //输入是x
ssSetInputPortWidth(S, 0, 1);
ssSetInputPortRequiredContiguous(S, 0, true);
ssSetInputPortDirectFeedThrough(S, 0, 1);
if (!ssSetNumOutputPorts(S, 1)) return; //输出是S(x)
ssSetOutputPortWidth(S, 0, 1);
ssSetNumSampleTimes(S, 1);
ssSetNumRWork(S, 0);
ssSetNumIWork(S, 0);
ssSetNumPWork(S, 0);
ssSetNumModes(S, 0);
ssSetNumNonsampledZCs(S, 0);
ssSetSimStateCompliance(S, USE_DEFAULT_SIM_STATE);
ssSetOptions(S, 0);
}
static void mdlInitializeSampleTimes(SimStruct *S)
{
ssSetSampleTime(S, 0, CONTINUOUS_SAMPLE_TIME);
ssSetOffsetTime(S, 0, 0.0);
}
#define MDL_INITIALIZE_CONDITIONS
#if defined(MDL_INITIALIZE_CONDITIONS)
static void mdlInitializeConditions(SimStruct *S)
{
}
#endif
#define MDL_START
#if defined(MDL_START)
static void mdlStart(SimStruct *S)
{
}
#endif /* MDL_START */
static void mdlOutputs(SimStruct *S, int_T tid)
{
const real_T *map = mxGetPr(ssGetSFcnParam(S,0)); //获取定点数据
const int_T *mapSize = mxGetDimensions(ssGetSFcnParam(S,0)); //定点数组维数
const real_T *x = (const real_T*) ssGetInputPortSignal(S,0); //输入x
real_T *y = ssGetOutputPortSignal(S,0); //输出y
int_T step = 0; //输入x在定点数中的位置
int_T i;
real_T yval;
for (i = 0; i < mapSize[0]; i++)
{
if (x[0] >= map[i] && x[0] < map[i + 1])
{
step = i;
break;
}
}
cubic_getval(&yval, mapSize, map, x[0], step);
y[0] = yval;
}
//自然边界的三次样条曲线函数
void cubic_getval(real_T* y, const int_T* size, const real_T* map, const real_T x, const int_T step)
{
int_T n = size[0];
//曲线系数
real_T* ai = (real_T*)malloc(sizeof(real_T) * (n-1));
real_T* bi = (real_T*)malloc(sizeof(real_T) * (n-1));
real_T* ci = (real_T*)malloc(sizeof(real_T) * (n-1));
real_T* di = (real_T*)malloc(sizeof(real_T) * (n-1));
real_T* h = (real_T*)malloc(sizeof(real_T) * (n-1)); //x的??
/* M矩阵的系数
*[B0, C0, ...
*[A1, B1, C1, ...
*[0, A2, B2, C2, ...
*[0, ... An-1, Bn-1]
*/
real_T* A = (real_T*)malloc(sizeof(real_T) * (n-2));
real_T* B = (real_T*)malloc(sizeof(real_T) * (n-2));
real_T* C = (real_T*)malloc(sizeof(real_T) * (n-2));
real_T* D = (real_T*)malloc(sizeof(real_T) * (n-2)); //等号右边的常数矩阵
real_T* E = (real_T*)malloc(sizeof(real_T) * (n-2)); //M矩阵
real_T* M = (real_T*)malloc(sizeof(real_T) * (n)); //包含端点的M矩阵
int_T i;
//计算x的步长
for ( i = 0; i < n -1; i++)
{
h[i] = map[i + 1] - map[i];
}
//指定系数
for( i = 0; i< n - 3; i++)
{
A[i] = h[i]; //忽略A[0]
B[i] = 2 * (h[i] + h[i+1]);
C[i] = h[i+1]; //忽略C(n-1)
}
//指定常数D
for (i = 0; i<n - 3; i++)
{
D[i] = 6 * ((map[n + i + 2] - map[n + i + 1]) / h[i + 1] - (map[n + i + 1] - map[n + i]) / h[i]);
}
//求解三对角矩阵,结果赋值给E
TDMA(E, n-3, A, B, C, D);
M[0] = 0; //自然边界的首端M为0
M[n-1] = 0; //自然边界的末端M为0
for(i=1; i<n-1; i++)
{
M[i] = E[i-1]; //其它的M值
}
//?算三次?条曲?的系数
for( i = 0; i < n-1; i++)
{
ai[i] = map[n + i];
bi[i] = (map[n + i + 1] - map[n + i]) / h[i] - (2 * h[i] * M[i] + h[i] * M[i + 1]) / 6;
ci[i] = M[i] / 2;
di[i] = (M[i + 1] - M[i]) / (6 * h[i]);
}
*y = ai[step] + bi[step]*(x - map[step]) + ci[step] * (x - map[step]) * (x - map[step]) + di[step] * (x - map[step]) * (x - map[step]) * (x - map[step]);
free(h);
free(A);
free(B);
free(C);
free(D);
free(E);
free(M);
free(ai);
free(bi);
free(ci);
free(di);
}
void TDMA(real_T* X, const int_T n, real_T* A, real_T* B, real_T* C, real_T* D)
{
int_T i;
real_T tmp;
//上三角矩阵
C[0] = C[0] / B[0];
D[0] = D[0] / B[0];
for(i = 1; i<n; i++)
{
tmp = (B[i] - A[i] * C[i-1]);
C[i] = C[i] / tmp;
D[i] = (D[i] - A[i] * D[i-1]) / tmp;
}
//直接求出X的最后一个值
X[n-1] = D[n-1];
//逆向迭代, 求出X
for(i = n-2; i>=0; i--)
{
X[i] = D[i] - C[i] * X[i+1];
}
}
#define MDL_UPDATE
#if defined(MDL_UPDATE)
static void mdlUpdate(SimStruct *S, int_T tid)
{
}
#endif
#define MDL_DERIVATIVES
#if defined(MDL_DERIVATIVES)
static void mdlDerivatives(SimStruct *S)
{
}
#endif
static void mdlTerminate(SimStruct *S)
{
}
#ifdef MATLAB_MEX_FILE
#include "simulink.c"
#else
#include "cg_sfun.h"
#endif
参考链接
三次样条插值(Cubic Spline Interpolation)及代码实现(C语言)
三次样条(cubic spline)插值


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 25岁的心里话
· 闲置电脑爆改个人服务器(超详细) #公网映射 #Vmware虚拟网络编辑器
· 零经验选手,Compose 一天开发一款小游戏!
· 因为Apifox不支持离线,我果断选择了Apipost!
· 通过 API 将Deepseek响应流式内容输出到前端