
斜框IOU实现
在目标检测时通常需要计算包围框的IOU,用于判断正负样本以及后续NMS过滤。框A和框B的IOU的值为其交集面积除以并集面积,
如果框为轴向包围盒,则可以参考IOU及NMS实现 ,但有时会遇到旋转框问题,这里对旋转框IOU计算方法做一个记录。
一、算法思路
参考论文 RRPN中提出的旋转框IOU计算方法
输入输出
- 输入: 由表示的一系列矩形,其中表示框的中心坐标,表示框的宽度,表示框的高度,表示框由轴向包围框顺时针旋转至当前位置的角度。
- 输出: 任意两矩形之间的IOU值
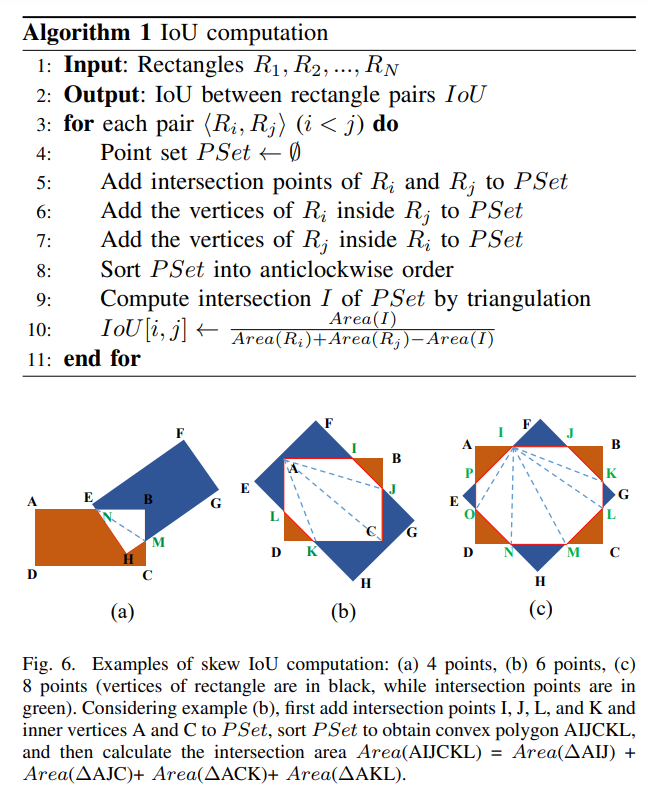
算法步骤
对于任意两个四边形和,其IOU计算如下:
- 将四边形和边的交点存于点集
- 将落在内部的顶点存于点集
- 将落在内部的顶点存于点集
- 对点集中点按照逆时针排序
- 三角化后计算三角形面积,其和即为交集面积
二、关键算子
2.1 坐标转换
以表示矩形,在计算点集时需要依据矩形四个顶点坐标,所以需要弄清楚中间转换过程。

如上图所示,红色框为目标斜框,绿色框表示轴向框,轴向框顺时针旋转后得到目标斜框,现需要求出斜框各顶点的坐标。
步骤1:中心点到轴向框顶点向量
依据中心点和框的宽度和高度可以得到中心点到轴向框各顶点坐标的向量分别为,
步骤2:向量顺时针旋转
参考博客:平面向量旋转可知,顺时针旋转其旋转矩阵为
所以向量
以求解为例,其横坐标, 纵坐标
所以
因此:顶点的坐标为:
同理:
所以有:
代码实现
struct RotatedBox {
float x_ctr, y_ctr, w, h, a;
};
struct Point {
float x, y;
Point(const float& px = 0, const float& py = 0) : x(px), y(py) {}
Point operator+(const Point& p) const {
return Point(x + p.x, y + p.y);
}
Point& operator+=(const Point& p) {
x += p.x;
y += p.y;
return *this;
}
Point operator-(const Point& p) const {
return Point(x - p.x, y - p.y);
}
Point operator*(const float coeff) const {
return Point(x * coeff, y * coeff);
}
}
void GetRotatedVertices(const RotatedBox& box, Point(&pts)[4]) {
// M_PI / 180. == 0.01745329251
double theta = box.a * 0.01745329251;
float cosTheta2 = (float)cos(theta) * 0.5f;
float sinTheta2 = (float)sin(theta) * 0.5f;
// y: top --> down; x: right --> left
pts[0].x = box.x_ctr + sinTheta2 * box.h + cosTheta2 * box.w;
pts[0].y = box.y_ctr + cosTheta2 * box.h - sinTheta2 * box.w;
pts[1].x = box.x_ctr - sinTheta2 * box.h + cosTheta2 * box.w;
pts[1].y = box.y_ctr - cosTheta2 * box.h - sinTheta2 * box.w;
pts[2].x = 2 * box.x_ctr - pts[0].x;
pts[2].y = 2 * box.y_ctr - pts[0].y;
pts[3].x = 2 * box.x_ctr - pts[1].x;
pts[3].y = 2 * box.y_ctr - pts[1].y;
}
2.2 线段求交
代码实现
double EPS = 1e-5;
float Cross2d(const Point & A, const Point & B) {
return A.x * B.y - B.x * A.y;
}
bool Insert(const Point& A, const Point& B, const Point& C, const Point&D, Point&P)
{
Point AB = B - A;
Point CD = D - C;
float det = Cross2d(CD , AB);
// This takes care of parallel lines
if (std::fabs(det) <= 1e-14) {
return false;
}
Point AC= C - A;
double t = Cross2d(CD, AC) / det;
double u = Cross2d(AB, AC) / det;
if (t > -EPS && t < 1.0f + EPS && u > -EPS && u < 1.0f + EPS) {
P = A + AB * t;
return true;
}
}
2.3 点是否在多边形内部
参考常见几何问题中第1个内容:点是否在多边形内部,可以采用其中射线法的思路。
但这里框是矩形,所以可以采用以下更简单的判别方法。

如上图所示,如果点在矩形内部,则:
到的投影长度小于或等于的长度且 到的投影长度小于或等于,
其中投影可以采用向量点乘计算
相反如果点在矩形外部,则:
到的投影长度大于的长度且 到的投影长度大于
代码实现
double EPS = 1e-5;
float Dot2d(const Point & A, const Point & B) {
return A.x * B.x + A.y * B.y;
}
bool IsInner(const Point& A, const Point&B, const Point& C, const Point&D, const Point& P){
const Point& AB = B - A;
const Point& AD = D - A;
float ABdotAB = Dot2d(AB, AB);
float ADdotAD = Dot2d(AD, AD);
Const Point& AP = P - A;
float APdotAB = Dot2d(AP, AB);
float APdotAD = Dot2d(AP, AD);
if ((APdotAB > -EPS) && (APdotAD > -EPS) && (APdotAB < ABdotAB + EPS) && (APdotAD < ADdotAD + EPS)) {
return true;
}
return false;
}
2.4 点集排序
由于矩形框相交形成的相交区域都是凸区域,所以可以借助凸包来完成逆时针排序。
参考博客凸包(Convex Hull)问题算法详解以及凸包算法(Graham扫描法), 这里采用Graham(格拉翰)扫描法
博主给了个动图,很好的演示了算法流程, 动图地址请==>动图

算法步骤
- 先找出y值最小的点,如果存在y值相等,则优先选择x值最小的作为起始点,该点一定处于凸包上;
- 以作为原点,其他所有点减去得到对应的向量;
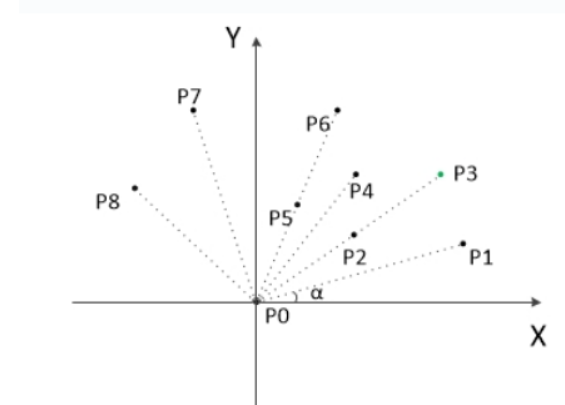
- 计算所有向量与轴正向的夹角,按从小到大进行排列,遇到相同的情况,则向量较短(即离较近的点)的排在前面,得到初始点序,由几何关系可知点序中第一个点和最后一个点一定在凸包上;
- 将和压入栈中,将后续点作为当前点,跳转第8步;
- 栈中最上面那个点形成向量, 利用叉乘判断当前点是否在该向量的左边还是右边或者向量上
- 如果在左边或者向量上,则将当前点压入栈中,下一个点作为当前点,跳转第8步
- 如果当前点在向量右边,则表明栈顶元素不在凸包上,将栈顶元素弹出,跳转第5步;
- 判断当前点是否是最后一个元素,如果是则将其压缩栈中,栈中所有元素即是凸包上所有点,算法结束,否则跳到第5步。
代码实现
int ConvexHullGraham(const std::vector<Point> &p, std::vector<Point> &q, bool bShiftToZero = false)
{
const numIn = p.size();
q.resize(numIn);
// Step 1:
// Find point with minimum y
// if more than 1 points have the same minimum y,
// pick the one with the minimum x.
int t = 0;
for (int i = 1; i < numIn; i++) {
if (p[i].y < p[t].y || (p[i].y == p[t].y && p[i].x < p[t].x)) {
t = i;
}
}
Point& start = p[t]; // starting point
// Step 2:
// Subtract starting point from every points (for sorting in the next step)
for (int i = 0; i < numIn; i++) {
q[i] = p[i] - start;
}
// Swap the starting point to position 0
Point tmp = q[0];
q[0] = q[t];
q[t] = tmp;
// Step 3:
// Sort point 1 ~ numIn according to their relative cross-product values
// (essentially sorting according to angles)
// If the angles are the same, sort according to their distance to origin
float dist(numIn);
#if defined(__CUDACC__) || __HCC__ == 1 || __HIP__ == 1
// compute distance to origin before sort, and sort them together with the
// points
for (int i = 0; i < numIn; i++) {
dist[i] = Dot2d(q[i], q[i]);
}
// CUDA version
// In the future, we can potentially use thrust
// for sorting here to improve speed (though not guaranteed)
for (int i = 1; i < numIn - 1; i++) {
for (int j = i + 1; j < numIn; j++) {
float crossProduct = Cross2d(q[i], q[j]);
if ((crossProduct < -1e-6) || (std::fabs(crossProduct) < 1e-6 && dist[i] > dist[j])) {
Point qTmp = q[i];
q[i] = q[j];
q[j] = qTmp;
Point distTmp = dist[i];
dist[i] = dist[j];
dist[j] = distTmp;
}
}
}
#else
// CPU version
std::sort(
q + 1, q + numIn, [](const Point& A, const Point& B) -> bool {
float temp = Cross2d(A, B);
if (std::fabs(temp) < 1e-6) {
return Dot2d(A, A) < Dot2d(B, B);
} else {
return temp > 0;
}
});
// compute distance to origin after sort, since the points are now different.
for (int i = 0; i < numIn; i++) {
dist[i] = Dot2d(q[i], q[i]);
}
#endif
// Step 4:
// Make sure there are at least 2 points (that don't overlap with each other)
// in the stack
int k; // index of the non-overlapped second point
for (k = 1; k < numIn; k++) {
if (dist[k] > 1e-8) {
break;
}
}
if (k == numIn) {
// We reach the end, which means the convex hull is just one point
q[0] = p[t];
return 1;
}
q[1] = q[k];
int m = 2; // 2 points in the stack
// Step 5:
// Finally we can start the scanning process.
// When a non-convex relationship between the 3 points is found
// (either concave shape or duplicated points),
// we pop the previous point from the stack
// until the 3-point relationship is convex again, or
// until the stack only contains two points
for (int i = k + 1; i < numIn; i++) {
while (m > 1) {
auto q1 = q[i] - q[m - 2], q2 = q[m - 1] - q[m - 2];
// Cross2d() uses FMA and therefore computes round(round(q1.x*q2.y) -
// q2.x*q1.y) So it may not return 0 even when q1==q2. Therefore we
// compare round(q1.x*q2.y) and round(q2.x*q1.y) directly. (round means
// round to nearest floating point).
if (q1.x * q2.y >= q2.x * q1.y)
m--;
else
break;
}
// Using double also helps, but float can solve the issue for now.
// while (m > 1 && Cross2d(q[i] - q[m - 2], q[m - 1] - q[m - 2])
// >= 0) {
// m--;
// }
q[m++] = q[i];
}
// Step 6 (Optional):
// In general sense we need the original coordinates, so we
// need to shift the points back (reverting Step 2)
// But if we're only interested in getting the area/perimeter of the shape
// We can simply return.
if (!bShiftToZero) {
for (int i = 0; i < m; i++) {
q[i] += start;
}
}
return m;
}
参考链接
Arbitrary-Oriented Scene Text Detection via Rotation Proposals
Rotated IoU 计算旋转矩形之间的重叠面积
Detector2


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 25岁的心里话
· 闲置电脑爆改个人服务器(超详细) #公网映射 #Vmware虚拟网络编辑器
· 零经验选手,Compose 一天开发一款小游戏!
· 因为Apifox不支持离线,我果断选择了Apipost!
· 通过 API 将Deepseek响应流式内容输出到前端
2019-01-15 主成分分析(PCA)学习笔记