
矩方法应用
最近用到了矩方法对目标检测的结果进行后处理,包括求中心点,偏角和长短轴。基本步骤如下:
- 第一步:将检测到物体的平行框位置作为ROI区域;
- 第二步:对ROI区域进行预处理(灰度化、二值化);
- 第三步:利用矩方法求出物体的矩(OPENCV::moments);
- 第四步:利用矩分别计算中心点,偏角和长短轴。
理论部分可以参考这篇博客。
一、求中心点
单通道图像的矩的面积为:
其中表示单通道图像在点上的灰度值,一阶矩定义为:
通过一阶矩求出物体重心位置:
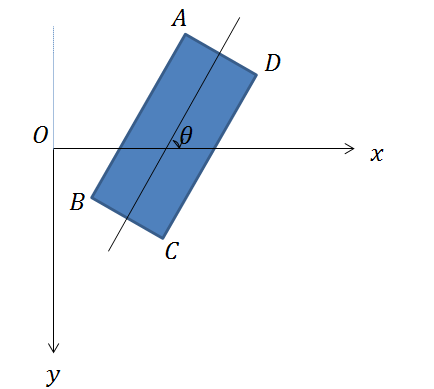
二、求偏角
物体的二阶矩定义为:
通过二阶矩计算偏转角度:
其中,,。
求出的角度为轴正方向与物体长轴所形成的角度,其范围为,轴正向的逆时针方向为负,顺时针为正。
三、求长短轴
长半轴和短半轴定义为:
根据长短轴和中心点及偏角可以求出包含物体的斜框区域。
四、结果展示
红色点表示物体中心,黄色框是通过中心点、偏角和长短轴计算出四个顶点后画出来的。

五、代码
std::vector< std::vector< cv::Point> > contours;
std::vector<cv::Vec4i> hierarchy;
cv::findContours(cvImg, contours, hierarchy, cv::RETR_CCOMP, cv::CHAIN_APPROX_SIMPLE);
if (contours.size() > 0) {
std::vector< cv::Point>cnt = contours[0];
for (int i = 1; i < contours.size(); ++i) {
if (contours[i].size() > cnt.size()) {
cnt = contours[i];
}
}
cv::Moments mu = cv::moments(cnt);
cv::Point2f center = cv::Point2f(static_cast<float>(mu.m10 / mu.m00), static_cast<float>(mu.m01 / mu.m00));
}


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· AI与.NET技术实操系列:基于图像分类模型对图像进行分类
· go语言实现终端里的倒计时
· 如何编写易于单元测试的代码
· 10年+ .NET Coder 心语,封装的思维:从隐藏、稳定开始理解其本质意义
· .NET Core 中如何实现缓存的预热?
· 25岁的心里话
· 闲置电脑爆改个人服务器(超详细) #公网映射 #Vmware虚拟网络编辑器
· 零经验选手,Compose 一天开发一款小游戏!
· 因为Apifox不支持离线,我果断选择了Apipost!
· 通过 API 将Deepseek响应流式内容输出到前端