


关于SVD
下面的公式是基于物品的计算:
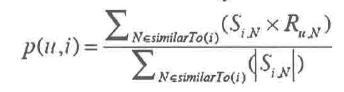
我之所以要把粘出来,是因为这种计算模式是公式界常用的一种方式:体会一下,单个来讲SiN*Run / |Sin|,分子分母公约之后只剩下了Run了;但是公式记录的是一种和运算,所以这就代表Run的某种运算,试想,如果两个物品完全相同,那么真的就是可以分子分母约分;那评分本来就是应该一样的;
当然没有两个物品是完全相似的。
U是用于行压缩(减少样本数),V是用于列压缩(降维)
通过压缩图像的例子,我们看出来其实本质来讲最终输出的内容是一致的(无论是压缩还是不压缩);但是关键在于压缩的过程中,正常模式要构建一个32*32的像素点阵要1024个数据;但是如果会用svd,你会发现其实只是需要两个32 * 2(U和VT)以及2个奇异值(如果算上0值是4个数据),搞掂;压缩了将近10倍。
其实SVD最迷人的地方还是在存储上,就像上面说的正常要存储1024个点,但是基于SVD,只需要存储130个点就可以了,比如只是存储U,S,VT,只有在需要的时候计算一下就可了。
下面介绍一下SVD的原理;讲解SVD原理之前,想要介绍几个线性代数的概念:首先是向量的长度和角度;向量的长度又称之为向量的模,是向量元素(坐标)的平方和的根。

至于向量的角度,就是在当前坐标系向,向量和坐标轴的夹角(向量的角度并没有明确的定义,可以这样来理解)。
下面再来说说正交矩阵;正交矩阵是这样的来的;作为一个向量A,在e1,e2坐标系下;然后现在还有另外一个坐标系,我们称之为e1',e2',在此坐标系下构建一个向量A',这个A'要和A重合,虽然是两个不同的坐标系,但是A和A'在e1,e2坐标系下来看和A是同一个位置;
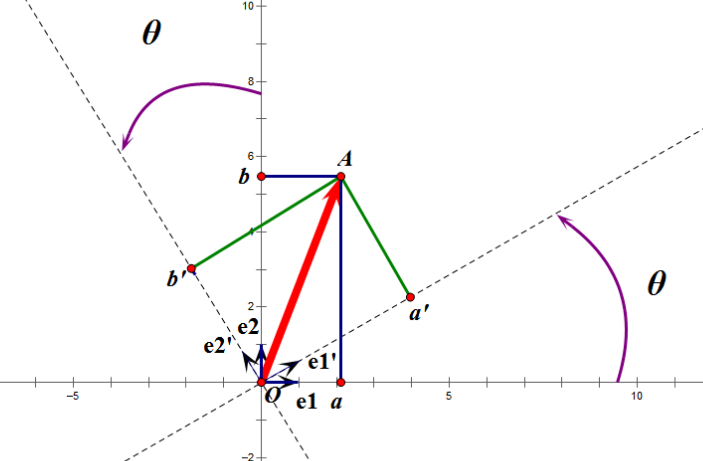
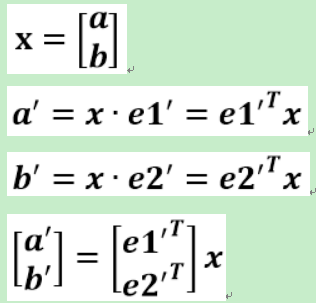
这里就存在一个映射关系,然后,对于e1',e2'的坐标系:
(a',b').T=U*(a,b).T
这里的U就是一个正交矩阵。那么怎么来计算这个U呢?
观察一下上面的图,e1'在e1的映射中,x轴代表sinx,y周代表cosx(夹角对应边的映射是sin,非夹角对应边是cos,建立e1',和e2'的值,注意夹角寻找θ):

这样,由上面的一系列过程我们就推知了U值,因为U值就是:
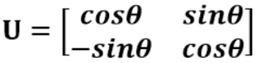
为什么是这个值?因为U是(参看上面的推导):

其实这里正在讲的是线性代数和空间几何中常见的一种场景:正交旋转。将一个坐标系旋转到另外一个坐标系下,这个变换,也叫做正交变换。
正交矩阵完事了,在讲述SVD之前还要在介绍一个计算:EVD(eigenvalue decomposition),特征值分解。
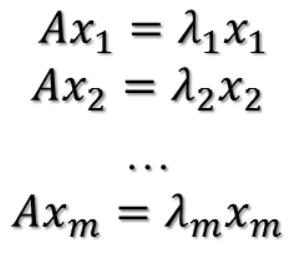
我们介绍一下EVD的一个特例,EVD我们知道是Ax = λx(在PCA小节中曾经提到过,那个时候使用的v,本节使用的x),给定了向量A,右乘一个x等价于与一个标量λ右乘一个x;其中λ称之为特征值,x称之为特征向量。这里我们拿一个特例来说明,对称矩阵,加入有一个m*m的对称矩阵,特定的λ为λi,对应的特征向量为xi,则有下面的推导:
令U和Λ为:
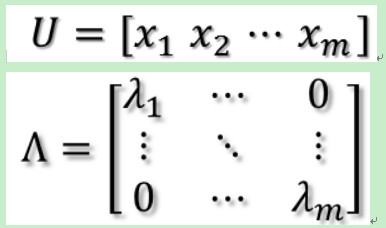
则有:
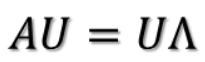
继续推导:

到此,注意Ax等式的右边是UT*x,这说明了什么,上大段我们讲述了旋转,U是一个正交矩阵,右乘了一个x,代表着要把x进行旋转,旋转到新的坐标轴下,旋转后的结果就是[a1, a2, a3...am];于是有:
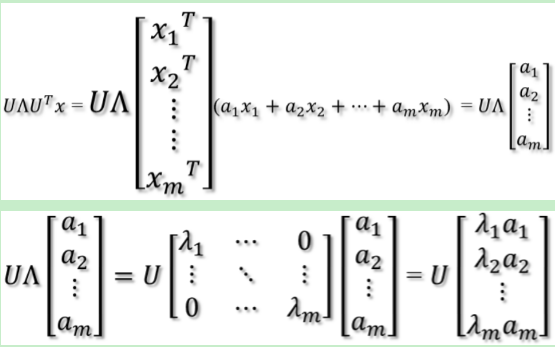
到了最后等到Ax的结果其实是对于原数据伸缩,完成这个的伸缩就是特征值 λi;然后U再左乘这个值,就实现了对于拉伸后数据的旋转。
参考:
向量的长度:
https://baike.baidu.com/item/%E5%90%91%E9%87%8F%E7%9A%84%E6%A8%A1/2073854?fr=aladdin
SVD原理:
https://blog.csdn.net/y1535766478/article/details/76944404


