[MicroPython]TurniBit开发板DIY自动窗帘模拟系统
一、准备工作
üTurnipBit 开发板 一块
ü下载数据线 一条
ü微型步进电机(28BYJ-48) 一个
ü步进电机驱动板(ULN2003APG) 一块
ü光敏传感器 一个
üTurnipBit 扩展板 一块
ü接入网络的电脑 一台
ü在线可视化编程器
<http://turnipbit.com/PythonEditor/editor.html>
二、步进电机的介绍
本次实验采用的是28BYJ-48 四相八拍电机,电压DC5V~12V。
24BYJ48名称的含义:
24:电机外径24mm
B:步进电机中步字的拼音首字母
Y:永磁中永字的拼音首字母
J:减速的减字拼音首字母
48:四相8步
实物图

工作原理
步进电机是将电脉冲信号转变为角位移或线位移的开环控制电机,是现代数字程序控制系统中的主要执行元件,应用极为广泛。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
28BYJ-48 步进电机参数表

上表中启动频率≥550 P.P.S(每秒脉冲数),意思是要想正常启动,需要单片机每秒至少给出550个步进脉冲。那么每一节拍需要持续的时间就是1S/550≈1.8ms,所以控制节拍刷新的速率应大约1.8ms。
驱动原理
当连续不断的给电机发送控制脉冲时,电机就会不断的转动。每一个脉冲信号对应步进电机的某一相或两相绕组的通电状态改变一次,对应转子就会转过一定的角度(步距角)。当通电状态的改变完成一个循环时,转子转过一个齿距。
四相步进电机可以在不同的通电方式下运行,常见的通电方式:
四拍(单相绕组通电):A-B-C-D-A…
双四拍(双相绕组通电):AB-BC-CD-DA-AB-...
八拍: A-AB-B-BC-C-CD-D-DA-A…
三、器件的连接
1、将步进电机白色接头插到驱动板对应的座子上。
2、TurnipBit对应插入扩展板,记住带有LED灯和按键的一面朝向扩展板带有针脚的一侧。
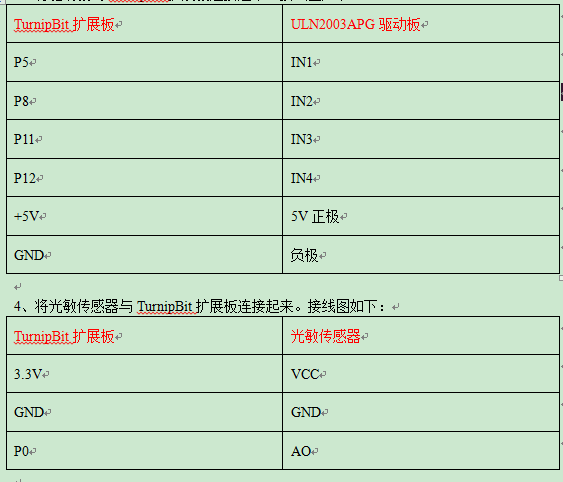
3、将驱动板与TurnipBit扩展板连接起来。接线图如下:
4、将光敏传感器与TurnipBit扩展板连接起来。接线图如下:
四、开始编程
1、之前的教程一直都是使用拖拽可视化编程,这种方式可以快速让零基础小伙伴入门,但是在实际项目或工作中,还是要直接敲代码的。今天就给大家介绍一下TurnipBit的可视化编程器的另一项功能--代码编程。
之前看过编程的小伙伴,不难发现,一打开编辑器首先进入的就是代码编程器界面。如下图:
2、接下来用代码实现对步进电机的控制和光照数据的采集。
ü当光照变弱时,步进电机顺时针旋转一周,模拟关闭窗帘的操作;
ü当光照变强时,步进电机逆时针旋转一周,模拟打开窗帘的操作;
完成源代码:
# 在这里添加Python代码
from microbit import *
Pin_All=[pin5,pin8,pin11,pin12]
#转速(ms) 数值越大转速越慢 最小值1.8ms
speed=5
STEPER_ROUND=512 #转动一圈(360度)的周期
ANGLE_PER_ROUND=STEPER_ROUND/360 #转动1度的周期
isOpen=False#表示窗帘的状态 True:打开 False:关闭
def SteperWriteData(data):
count=0
for i in data:
Pin_All[count].write_digital(i)
count+=1
def SteperFrontTurn():
global speed
SteperWriteData([1,1,0,0])
sleep(speed)
SteperWriteData([0,1,1,0])
sleep(speed)
SteperWriteData([0,0,1,1])
sleep(speed)
SteperWriteData([1,0,0,1])
sleep(speed)
def SteperBackTurn():
global speed
SteperWriteData([1,1,0,0])
sleep(speed)
SteperWriteData([1,0,0,1])
sleep(speed)
SteperWriteData([0,0,1,1])
sleep(speed)
SteperWriteData([0,1,1,0])
sleep(speed)
def SteperStop():
SteperWriteData([0,0,0,0])
def SteperRun(angle):
global ANGLE_PER_ROUND
val=ANGLE_PER_ROUND*abs(angle)
if(angle>0):
for i in range(0,val):
SteperFrontTurn()
else:
for i in range(0,val):
SteperBackTurn()
SteperStop()
while True:
light=pin0.read_analog()#读取光敏传感器传递过来的模拟量数据
#数值越大说明光照度越小
if light>400:
if isOpen:
isOpen=False
SteperRun(-360)#光照小于设定的值,关闭窗帘
else:
if isOpen==False:
isOpen=True
SteperRun(360)#光照大于设定的值,打开窗帘

 浙公网安备 33010602011771号
浙公网安备 33010602011771号