


halcon之屌炸天的自标定(2)
自 halcon之屌炸天的自标定(1)发出以后,有朋友看了文章也应用到了自己的测量项目中,效果奇好,成功搞定了20um的需求,可喜可贺。
在halcon之屌炸天的自标定(1)中我提到了一片论文:
T. Thormälen, H. Broszio: “Automatic line-based estimation of radial lens distortion”; in: Integrated Computer-Aided Engineering; vol. 12; pp. 177-190; 2005.
google了好久都是收费不能下载,有位朋友看到后帮我下载了,感谢。
所以本次就介绍下这篇论文:了解一下具体原理,这样用起来更得心应手。
论文下载地址:http://pan.baidu.com/s/1ntXnz09 在阅读下面内容时请先阅读原论文,要不然会云里雾里额。
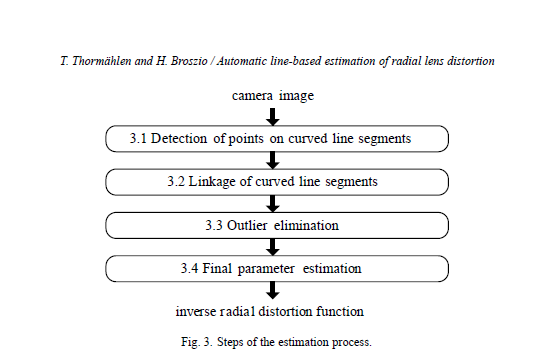
计算畸变系数的流程:
- 1.轮廓检测,找出满足条件的线段,相当于halcon的 edge_sub_pix + segment_contour_xld
- 2.共线线段连接,相当于halcon的 union_collinear_contours_xld
- 3.取出干扰线,就是去除在现实中不是直线的线段,可以用halcon中的select_contour_xld
- 4.求畸变参数,相当于halcon的 radial_distortion_self_calibration
论文中计算畸变系数的方法:
设置ru 为无畸变坐标点,rd为畸变后坐标点,k为畸变系数,两者关系式可用泰勒公式表示 (式1、2、3)
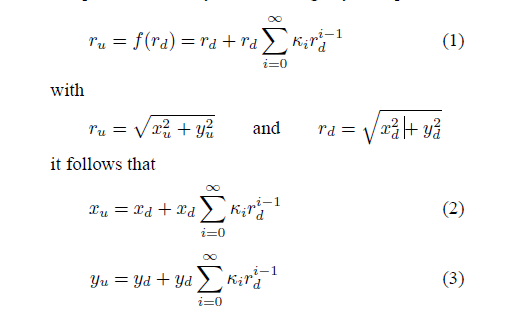
然后论文中又指出,实验标明k3,k5对畸变影响最大,其他k影像甚微,于是就把其他K项去掉变成了

所以计算畸变系数是否精确的关键就在ru rd 的选取上,坐着给出下图来解释,共线连接后长线段更能反应畸变情况,以此说明步骤2的必要性。
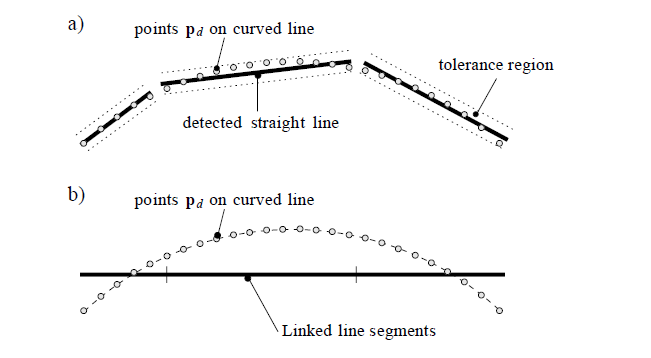
随后作者用RANSAC算法进一步过滤干扰线,并用实验标明RANSAC的好处。
说了这么多是不是有点晕晕的?要想了解够透彻还是要下载论文仔细阅读额~
关注微信:halconhub,每日获取halcon精华文章

作者: 小马_xiao
出处:http://www.cnblogs.com/xiaomaLV2/>
关于作者:专注halcon\opencv\机器视觉
本文版权归作者,未经作者同意必须保留此段声明,且在文章页面明显位置给出 原文链接


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· Linux系列:如何用heaptrack跟踪.NET程序的非托管内存泄露
· 开发者必知的日志记录最佳实践
· SQL Server 2025 AI相关能力初探
· Linux系列:如何用 C#调用 C方法造成内存泄露
· AI与.NET技术实操系列(二):开始使用ML.NET
· 被坑几百块钱后,我竟然真的恢复了删除的微信聊天记录!
· 没有Manus邀请码?试试免邀请码的MGX或者开源的OpenManus吧
· 【自荐】一款简洁、开源的在线白板工具 Drawnix
· 园子的第一款AI主题卫衣上架——"HELLO! HOW CAN I ASSIST YOU TODAY
· Docker 太简单,K8s 太复杂?w7panel 让容器管理更轻松!