

论文阅读笔记-Hierarchical Road Topology Learning for Urban Map-less Driving
Title:Hierarchical Road Topology Learning for Urban Map-less Driving
题目:面向城市无地图驾驶的分层道路拓扑学习
依赖于高清地图是自动驾驶汽车大规模部署的障碍之一,因为这种地图的可扩展性很差。在本文中,我们通过利用车辆本身的感知系统来解决在线地图提取的问题。
为此,我们设计了一个结构化模型,其中道路网络的图形表示在完全卷积网络中以分层方式生成。 该方法能够处理复杂的道路拓扑并且不需要用户参与。
我们设计了一种学习方法,其中在当前状态下学习道路状况及其组成部分,与道路复杂性和车道数量无关。 该模型接收反映瞬时环境状况以及道路结构和障碍物的车辆周围环境的快照。 然后,它以分层方式预测道路拓扑; 在低层检测自我车辆的可行驶车道,然后将此信息连接到全局拓扑图以进行稳健导航。 在地图的上下文中,该方法生成道路网络地图,即一个边是对应于路段的折线,顶点表示每个车道段的起点、终点和分叉点的空间坐标的图。 该地图根据自我车辆的位置和方向动态变化,仅包含车辆规划的相关信息。
分层道路拓扑学习
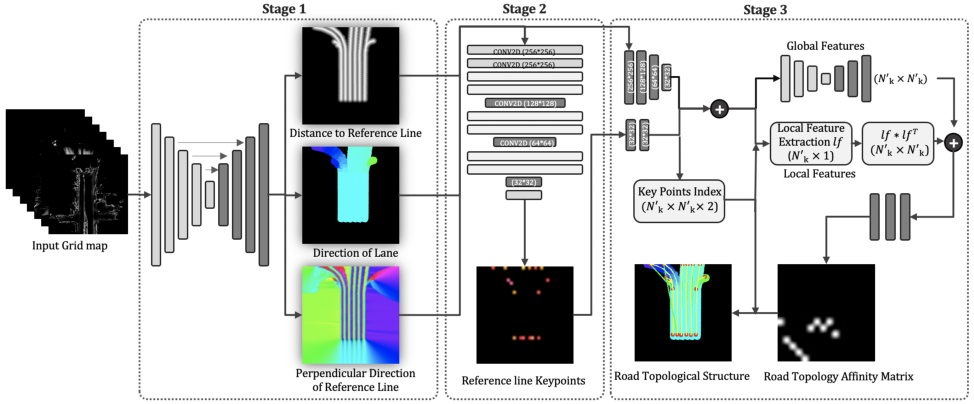
为了方便无地图自动驾驶,提出了一种分层地图学习方法,该方法不受高清地图的影响,能够纯粹基于车辆上的感觉系统来表示道路拓扑。在该方法中,道路拓扑被定义为一组关键点及其相对连通性,每个关键点代表一个车道段。该模型是一个多阶段、多任务的网络,经过训练,可以依次创建从可行驶车道到完整道路拓扑的地图组件。
输入参数化
将自我车辆周围的环境编码为栅格化的鸟瞰图,其中包含多个信息通道:占用率、地面语义、摄像机的地面标记和激光雷达的地面强度。
- 占用率通道:使用 Dempster-Shafer 组合规则,结合了来自 LiDAR 和相机的测量值,这些测量值在语义上被分类为障碍物。
- 地面语义通道:积累可行驶道路、人行道和地形的位置信息。
依据 [10] 和 [25] ,在前面的步骤中使用相机和 LiDAR 数据提取用于区分地面和障碍物测量的语义信息。 [10] 的模型被进一步扩展以推断相机图像中的道路标记,这些标记在地面标记通道中累积。
对于所有通道,测量值不仅在传感器之间累积,而且随着时间的推移(使用自我运动校正)累积,以获得单一的整体和时间稳定的输入表示。 结果是图像
在实验中,我们使用车辆始终位于图像底部 1⁄4 的编码。
范围定义
基于人类对驾驶视界的直观理解,道路拓扑的定义局限于自我车辆的感知范围。这个范围就是由车辆当前位置可到达的车道段,包括前进、转向、并线。当车辆移动并接收到新的测量值时,这个范围也将被更新。这些范围的探测和变化都是通过拓扑结构实现的。
在这里应用了一个方向约束,其中每个车道段应该与自我车辆的偏航成一个锐角。
第一阶段:特征提取
车辆的可行使车道是驾驶的最基本信息。根据上一小节定义的范围,在图
网络以与
- 车道的位置被编码为截断的反距离变换图像
- 每个车道的方向表示为
- 网络预测垂直方向图
这些特征在网络的后期阶段被利用,以促进地图的分层定义以实现道路拓扑预测。
损失函数:
通过最小化参考线检测损耗
反距离变换和方向图估计任务都被视为回归。三种损失均定义为余弦相似度与L1的和。
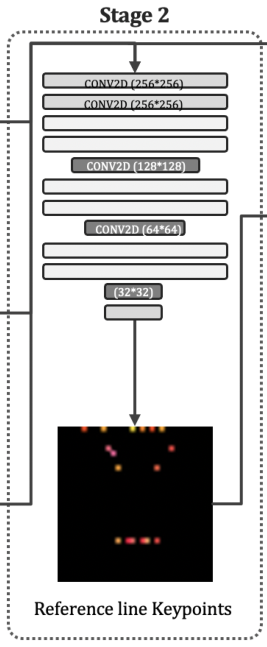
第二阶段:关键点生成
第二阶段通过预测称为关键点的图形节点
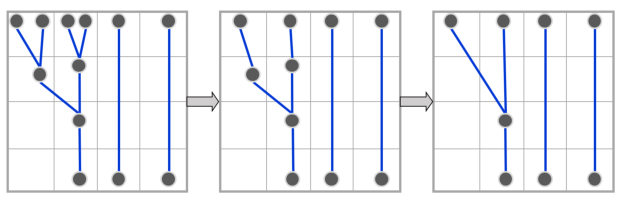
基于【范围定义】小节中定义的行驶水平生成的图形可能仍然非常复杂,为了便于学习,根据实际的标准车道宽度设置关键点网格的分辨率。
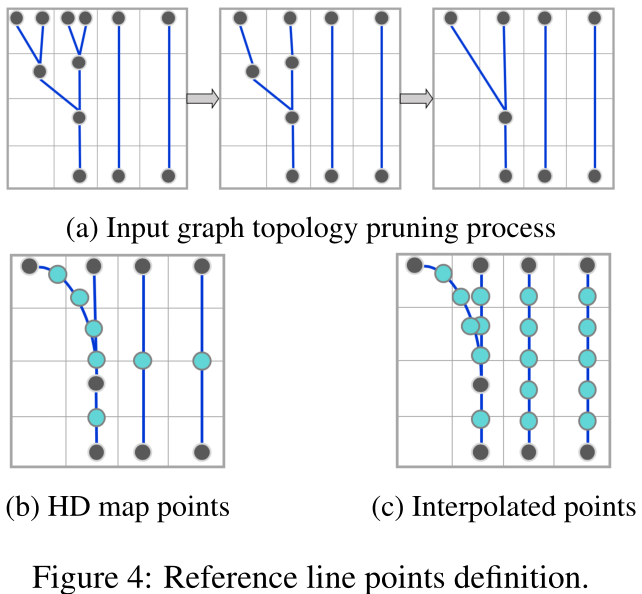
为了优化道路图并减少参数数量并确保相邻车道的关键点不落入同一个网格单元,每个单元只保留一个关键点,可以是第一个落入单元的关键点,也可以是单元格内所有关键点的平均值。此外,将消除所有不是起点的具有单个孩子的关键点。
我们将学习问题视为下采样网格空间中分割和回归的组合。 具有两个 2D 卷积层和 6 个残差块的轻量级 CNN 旨在根据前一阶段的输出预测关键点网格
损失函数:
为了训练网络,通过最小化损失
- 估计包含关键点的单元格的可能性的像素级 sigmoid 交叉熵损失
- 关键点坐标的均方误差
其中
第三阶段:关键点、连接性和参考线预测
为了完成包含所需连接边的图来创建道路拓扑结构,将上一阶段预测的关键点网格传递到网络的第三阶段,估计图亲和力矩阵
参考线的定义:
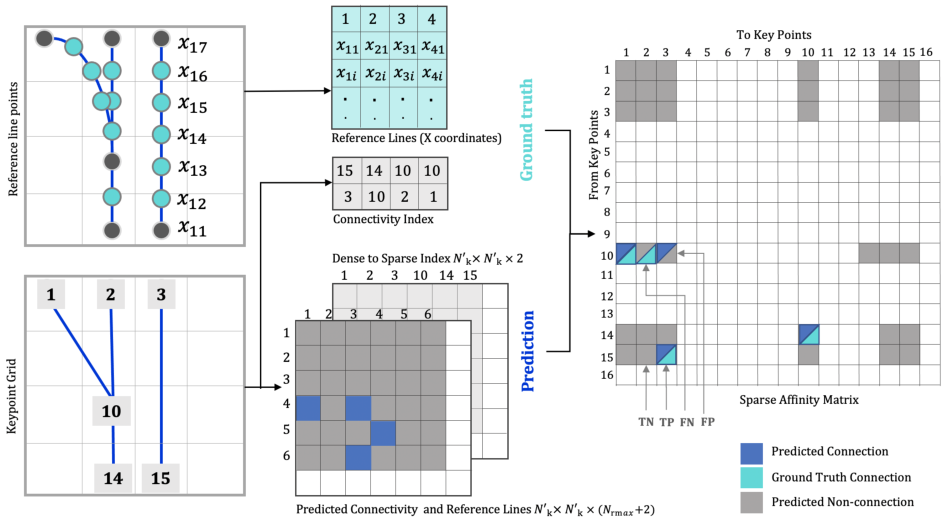
对于图4a中生成的原始拓扑,高清地图中基准线的定义可能包含不同数量的点,这取决于基准线的曲率(图4b)。为了简化回归任务,考虑到【范围定义】小节中解释的可行驶车道方向约束,将基准线表示为两个给定关键点之间垂直均匀分布的锚点集合。这样就可以计算出基准线点的y坐标,将预测任务简化为仅对x坐标的回归。图4c给出了上述基准线的地面真实值定义。
图亲和力矩阵预测:
理论上关键点网格最多可以有
对于一组给定的关键点,这些关键点表示为大小为
据此,第三阶段网络预测出一个密集的亲和矩阵
损失函数:
为了构建道路拓扑,细化之前估计的道路结构,定义以下损失函数,作为参考线分类和定位:
其中
实验
标签:
- 潜在的自我驾驶车道
- 方向特征
- 稀疏的道路拓扑
在高清地图可用的区域进行训练,应用到未绘制高清地图的区域。这种方法的优点是不需要额外的人工注释。


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 25岁的心里话
· 闲置电脑爆改个人服务器(超详细) #公网映射 #Vmware虚拟网络编辑器
· 基于 Docker 搭建 FRP 内网穿透开源项目(很简单哒)
· 零经验选手,Compose 一天开发一款小游戏!
· 一起来玩mcp_server_sqlite,让AI帮你做增删改查!!