虚函数和虚函数表
多态是由虚函数实现的,而虚函数主要是通过虚函数表(V-Table)来实现的。
如果一个类中包含虚函数(virtual修饰的函数),那么这个类就会包含一张虚函数表,虚函数表存储的每一项是一个虚函数的地址。如下图:
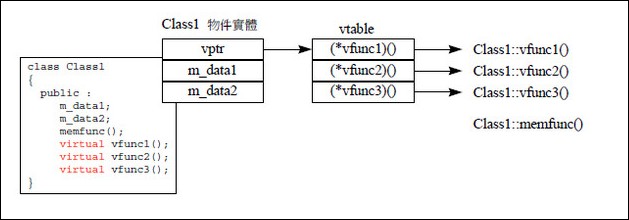
这个类的每一个对象都会包含一个虚指针(虚指针存在于对象实例地址的最前面,保证虚函数表有最高的性能),这个虚指针指向虚函数表。
注:对象不包含虚函数表,只有虚指针,类才包含虚函数表,派生类会生成一个兼容基类的虚函数表。
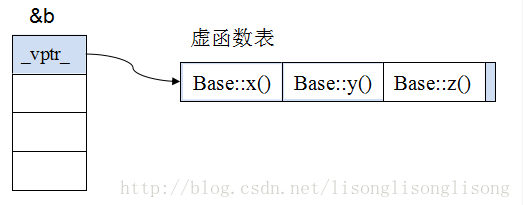
- 原始基类的虚函数表
下图是原始基类的对象,可以看到虚指针在地址的最前面,指向基类的虚函数表(假设基类定义了3个虚函数)
- 单继承时的虚函数(无重写基类虚函数)
假设现在派生类继承基类,并且重新定义了3个虚函数,派生类会自己产生一个兼容基类虚函数表的属于自己的虚函数表。
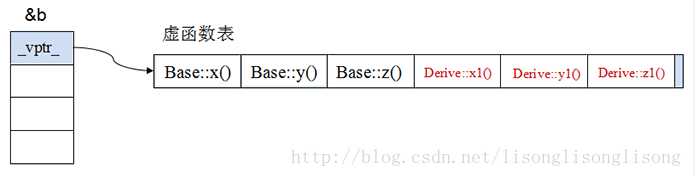
Derive class 继承了 Base class 中的三个虚函数,准确的说,是该函数实体的地址被拷贝到 Derive类的虚函数表,派生类新增的虚函数置于虚函数表的后面,并按声明顺序存放。
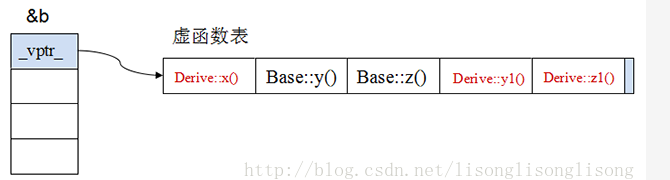
- 单继承时的虚函数(重写基类虚函数)
现在派生类重写基类的x函数,可以看到这个派生类构建自己的虚函数表的时候,修改了base::x()这一项,指向了自己的虚函数。
- 多重继承时的虚函数(Derived ::public Base1,public Base2)
这个派生类多重继承了两个基类base1,base2,因此它有两个虚函数表。
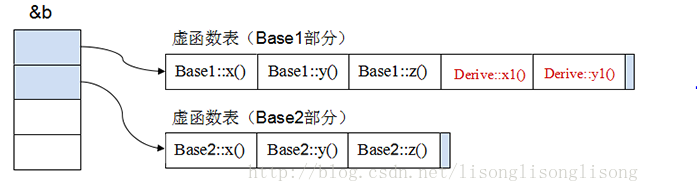
它的对象会有多个虚指针(据说和编译器相关),指向不同的虚函数表。
多重继承时指针的调整:
Derive b; Base1* ptr1 = &b; // 指向 b 的初始地址 Base2* ptr2 = &b; // 指向 b 的第二个子对象
因为 Base1 是第一个基类,所以 ptr1 指向的是 Derive 对象的起始地址,不需要调整指针(偏移)。
因为 Base2 是第二个基类,所以必须对指针进行调整,即加上一个 offset,让 ptr2 指向 Base2 子对象。
当然,上述过程是由编译器完成的。
Base1* b1 = (Base1*)ptr2; b1->y(); // 输出 Base2::y() Base2* b2 = (Base2*)ptr1; b2->y(); // 输出 Base1::y()
其实,通过某个类型的指针访问某个成员时,编译器只是根据类型的定义查找这个成员所在偏移量,用这个偏移量获取成员。由于 ptr2 本来就指向 Base2 子对象的起始地址,所以b1->y()调用到的是Base2::y(),而 ptr1 本来就指向 Base1 子对象的起始地址(即 Derive对象的起始地址),所以b2->y()调用到的是Base1::y()。
- 虚继承时的虚函数表
虚继承的引入把对象的模型变得十分复杂,除了每个基类(MyClassA和MyClassB)和公共基类(MyClass)的虚函数表指针需要记录外,每个虚拟继承了MyClass的父类还需要记录一个虚基类表vbtable的指针vbptr。MyClassC的对象模型如图4所示。

虚基类表每项记录了被继承的虚基类子对象相对于虚基类表指针的偏移量。比如MyClassA的虚基类表第二项记录值为24,正是MyClass::vfptr相对于MyClassA::vbptr的偏移量,同理MyClassB的虚基类表第二项记录值12也正是MyClass::vfptr相对于MyClassA::vbptr的偏移量。
编译时若基类中有虚函数,编译器为该的类创建一个一维数组的虚表,存放是每个虚函数的地址。基类和派生类都包含虚函数时,这两个类都建立一个虚表。构造函数中进行虚表的创建和虚表指针的初始化。在构造子类对象时,要先调用父类的构造函数,初始化父类对象的虚表指针,该虚表指针指向父类的虚表。执行子类的构造函数时,子类对象的虚表指针被初始化,指向自身的虚表。每一个类都有虚表。虚表可以继承,如果子类没有重写虚函数,那么子类虚表中仍然会有该函数的地址,只不过这个地址指向的是基类的虚函数实现。派生类的虚表中虚函数地址的排列顺序和基类的虚表中虚函数地址排列顺序相同。当用一个指针/引用调用一个函数的时候,被调用的函数是取决于这个指针/引用的类型。即如果这个指针/引用是基类对象的指针/引用就调用基类的方法;如果指针/引用是派生类对象的指针/引用就调用派生类的方法,当然如果派生类中没有此方法,就会向上到基类里面去寻找相应的方法。这些调用在编译阶段就确定了。当涉及到多态性的时候,采用了虚函数和动态绑定,此时的调用就不会在编译时候确定而是在运行时确定。不在单独考虑指针/引用的类型而是看指针/引用的对象的类型来判断函数的调用,根据对象中虚指针指向的虚表中的函数的地址来确定调用哪个函数。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号