2-9 局部最优的问题
局部最优的问题(The problem of local optima)
人们总是担心优化算法会困在极差的局部最优, 不过随着深度学习理论不断发展,我们对局部最优的理解也发生了改变。
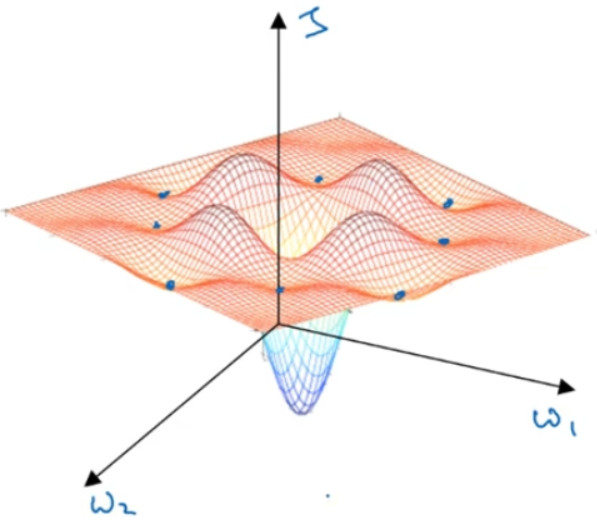
这是曾经人们在想到局部最优时脑海里会出现的图,也许你想优化一些参数,我们把它们称之为${W_1}$和${W_2}$,平面的高度就是损失函数。在图中似乎各处都分布着局部最优。梯度下降法或者某个算法可能困在一个局部最优中,而不会抵达全局最优。如果你要作图计算一个数字,比如说这两个维度,就容易出现有多个不同局部最优的图,而这些低维的图曾经影响了我们的理解,但是这些理解并不正确。事实上,如果你要创建一个神经网络,通常梯度为零的点并不是这个图中的局部最优点,实际上成本函数的零梯度点,通常是鞍点。
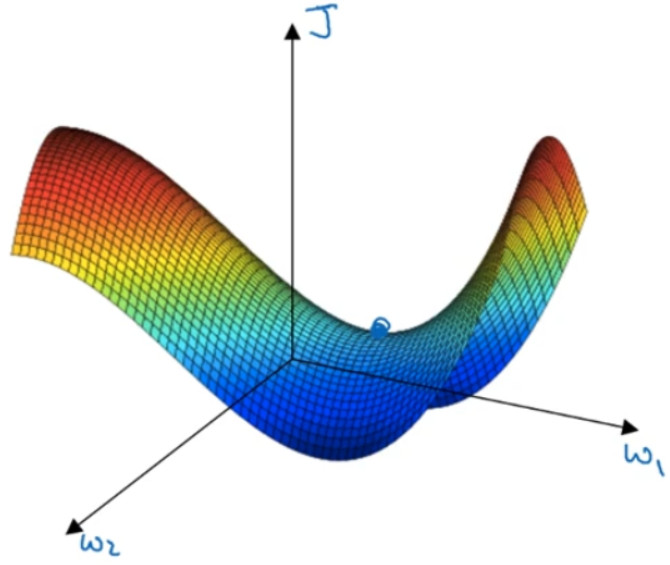
但是一个具有高维度空间的函数,如果梯度为 0,那么在每个方向,它可能是凸函数,也可能是凹函数。如果你在 2 万维空间中,那么想要得到局部最优,所有的 2 万个方向都需要是这样,但发生的机率也许很小,也许是${2^{ - 20000}}$,你更有可能遇到有些方向的曲线会这样向上弯曲,另一些方向曲线向下弯,而不是所有的都向上弯曲,因此在高维度空间,你更可能碰到鞍点,而不会碰到局部最优。
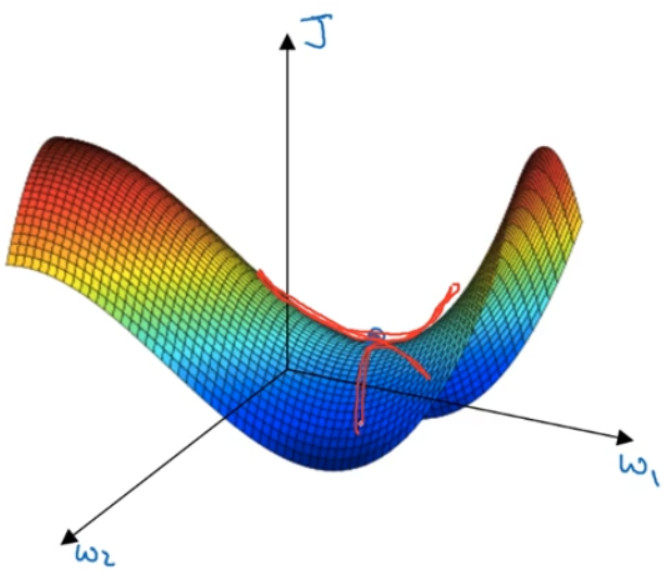
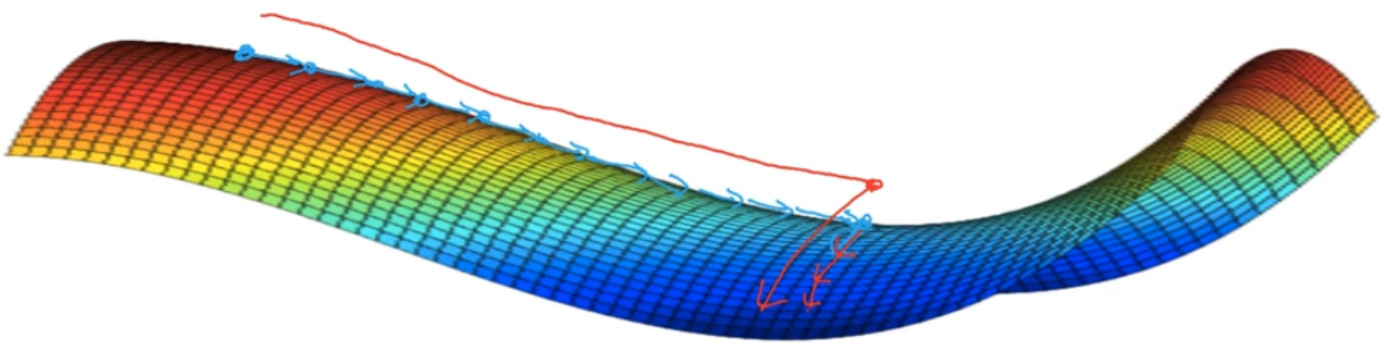
由上图我们可以分析是平稳段会减缓学习,平稳段是一块区域,其中导数长时间接近于 0,如果你在此处,梯度会从曲面从从上向下下降,因为梯度等于或接近 0,曲面很平坦,你得花上很长时间慢慢抵达平稳段的这个点。
总结:
你不太可能困在极差的局部最优中,条件是你在训练较大的神经网络,存在大量参数, 并且成本函数J被定义在较高的维度空间。
平稳段是一个问题,这样使得学习十分缓慢,这也是像 Momentum 或是RMSprop, Adam 这样的算法,能够加速学习算法的地方。在这些情况下,更成熟的优化算法,如 Adam 算法,能够加快速度,让你尽早往下走出平稳段。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号