2-5 动量梯度下降法
动量梯度下降法(Gradient descent with Momentum)
还有一种算法叫做 Momentum,或者叫做动量梯度下降法,运行速度几乎总是快于标准的梯度下降算法,简而言之,基本的想法就是计算梯度的指数加权平均数,并利用该梯度更新你的权重。
如果你要优化成本函数,函数形状如图,红点代表最小值的位置,利用梯度下降:

如果进行梯度下降法的一次迭代,无论是 batch 或 mini-batch下降法,可以看到是慢慢摆动到最小值,这种上下波动减慢了梯度下降法的速度,你就无法使用更大的学习率,如果你要用较大的学习率(紫色箭头),结果可能会偏离函数的范围,为了避免摆动过大,你要用一个较小的学习率。
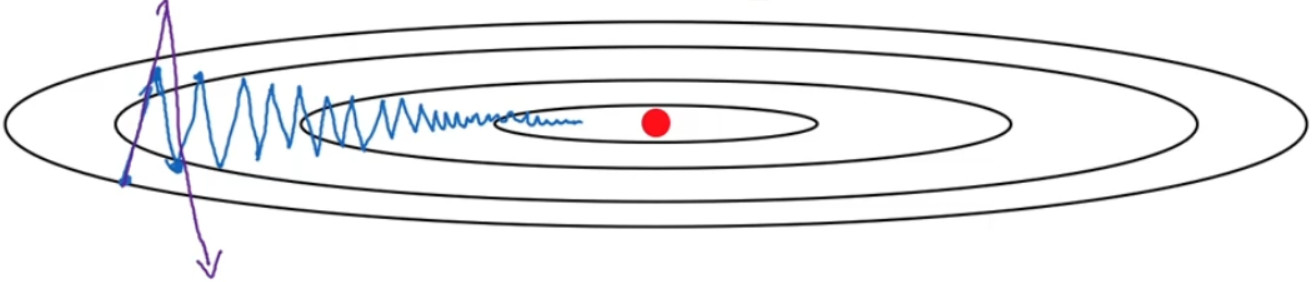
理想的情况是,在纵轴上,你希望学习慢一点,因为你不想要这些摆动,但是在横轴上,你希望加快学习,你希望快速从左向右移,移向最小值,移向红点。所以使用动量梯度下降法,你需要做的是,在每次迭代中,确切来说在第t次迭代的过程中,你会计算微分$dW$,$db$,你要做的是计算:
$vdw = \beta vdw + (1 - \beta )dW$
$vdb = \beta vdb + (1 - \beta )db$
然后重新赋值权重:
$W: = W - \alpha vdw$
$b: = b - \alpha vdb$
这样就可以减缓梯度下降的幅度。
你会发现这些纵轴上的摆动平均值接近于零,所以在纵轴方向,你希望放慢一点,平均过程中,正负数相互抵消,所以平均值接近于零。但在横轴方向,所有的微分都指向横轴方向,因此横轴方向的平均值仍然较大,因此用算法几次迭代后,你发现动量梯度下降法,最终纵轴方向的摆动变小了,横轴方向运动更快,因此你的算法走了一条更加直接的路径,在抵达最小值的路上减少了摆动。
具体的计算步骤:
这里有两个超参数$\alpha$和$\beta $,$\beta $控制着指数加权平均数。最常用的值是0.9,即现在平均了前十次迭代的梯度。实际上$\beta $为 0.9时,效果不错,你可以尝试不同的值,可以做一些超参数的研究,不过 0.9 是很棒的鲁棒数。
关于偏差修正,要拿$vdw$,$vdb$除以$1 - {\beta ^t}$,实际上人们不这么做,因为 10 次迭代之后,因为你的移动平均已经过了初始阶段。实际中,在使用梯度下降法或动量梯度下降法时,人们不会受到偏差修正的困扰。
$vdw$的初始值是0,它的维度与dW和W相同;
$vdb$的初始值是0,它的维度与db和b相同。
在一些资料中,也有删除$(1 - \beta )$,所以$vdw$缩小了$(1 - \beta )$倍,相当于乘以$\frac{1}{{1 - \beta }}$,所以你要用梯度下降最新值的话,$\alpha$要根据$\frac{1}{{1 - \beta }}$相应变化。实际上,二者效果都不错, 只会影响到学习率
$\alpha $的最佳值。我觉得这个公式用起来没有那么自然,因为有一个影响,如果你最后要调整超参数,$\beta $,就会影响到$vdw$和$vdb$你也许还要修改学习率$\alpha$,所以最好使用没有删除$(1 - \beta )$情况下的公式。
所以这就是动量梯度下降法,这个算法肯定要好于没有 Momentum 的梯度下降算法。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号