电赛控制类PID算法实现
一、什么是PID
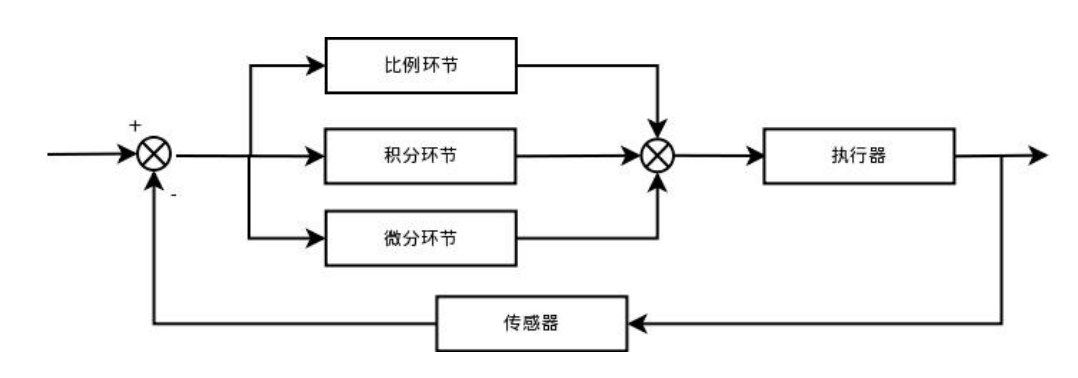
学过自动控制原理的对PID并不陌生,PID控制是对偏差信号e(t)进行比例、积分和微分运算变换后形成的一种控制规律。PID 算法的一般形式:

- PID控制系统原理框图
二、PID离散化
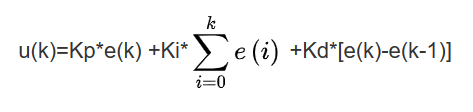
对PID连续系统离散化,从而方便在处理器上实现,PID 离散表示形式:

离散化后最终得到位置式PID:

u(k)为控制器输出的控制量;(输出)
e(k)为偏差信号,它等于给定量与输出量之差;(输入)
Kp 为比例系数;
Ti 为积分时间常数;
Td 为微分时间常数。
1. 位置式PID公式
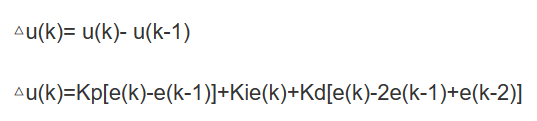
2. 增量式PID公式
三、两种PID的不同点
- 位置式
是一种非递推算法,输出值U(k)和执行机构的实际位置一一对应,在不带积分部件的对象中可以很好的应用。但是每次输出均与过去的状态有关,计算量大。 - 增量式
输出的是增量,控制增量的值仅与最近3次采样值有关,不需要累计偏差,运算量小,计算错误影响小。但会积分截断效应大,有稳态误差。
四、C语言程序实现
- pid.c
__EOF__

本文作者:xiaohu
本文链接:https://www.cnblogs.com/xiaohuzaixue/p/17438460.html
关于博主:评论和私信会在第一时间回复。或者直接私信我。
版权声明:本博客所有文章除特别声明外,均采用 BY-NC-SA 许可协议。转载请注明出处!
声援博主:如果您觉得文章对您有帮助,可以点击文章右下角【推荐】一下。您的鼓励是博主的最大动力!
本文链接:https://www.cnblogs.com/xiaohuzaixue/p/17438460.html
关于博主:评论和私信会在第一时间回复。或者直接私信我。
版权声明:本博客所有文章除特别声明外,均采用 BY-NC-SA 许可协议。转载请注明出处!
声援博主:如果您觉得文章对您有帮助,可以点击文章右下角【推荐】一下。您的鼓励是博主的最大动力!
分类:
电子设计竞赛


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· winform 绘制太阳,地球,月球 运作规律
· 超详细:普通电脑也行Windows部署deepseek R1训练数据并当服务器共享给他人
· 上周热点回顾(3.3-3.9)
· AI 智能体引爆开源社区「GitHub 热点速览」
· 写一个简单的SQL生成工具