相机模型——内参、外参
# 相机参数
针孔相机模型,包含四个坐标系:物理成像坐标系、像素坐标系、相机坐标系、世界坐标系。
相机参数包含:内参、外参、畸变参数
内参
【Intrinsics】
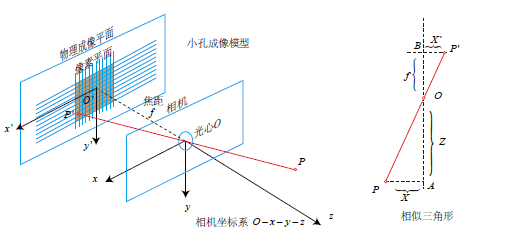
物理成像坐标系:\(O'-x'-y'\)
像素坐标系:\(O-u-v\)
相机坐标系:\(O-x-y\)
世界坐标系:\(O-X-Y-Z\)
在世界坐标系下的点\(P[X,Y,Z]^T\),通过相机坐标系下的光心\(O\)投影到物理成像平面上的\(P'[X',Y',Z']^T\),对应到像素坐标系下的\([u,v]^T\)。
由相似三角形可以得到:
带负号是因为小孔成像成的是倒像。为了简化模型,可以把物理成像平面看作为放到了相机的前方,这样可以直观的认为成立的正像(虚像),就像下图:
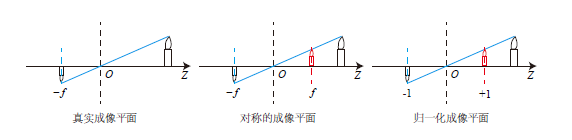
可以得到:
从物理成像坐标系到像素坐标系之前,相差了一个缩放和平移。缩放是因为两个坐标系之前的表示的单位长度不一致,平移是因为两个坐标系的原点不一致。
假设,像素坐标在\(u\)方向上缩放了\(\alpha\)倍,在\(v\)方向上缩放了\(\beta\)倍,同时,原点平移了\([c_x,c_y]^T\)。那么点\(P'[X',Y',Z']^T\)与像素坐标系下\([u,v]^T\)的关系为:
其中,变量的单位是\(f \rightarrow mm ; \alpha, \beta \rightarrow 像素/mm; f_x,f_y \rightarrow 像素\)。将坐标进行归一化,写成矩阵形式,并对左侧像素坐标进行齐次化,方便后面的运算:
把中间的量组成的矩阵称为相机的内参矩阵(Camera Intrinsics)\(\boldsymbol K\)。
内参矩阵参数获取

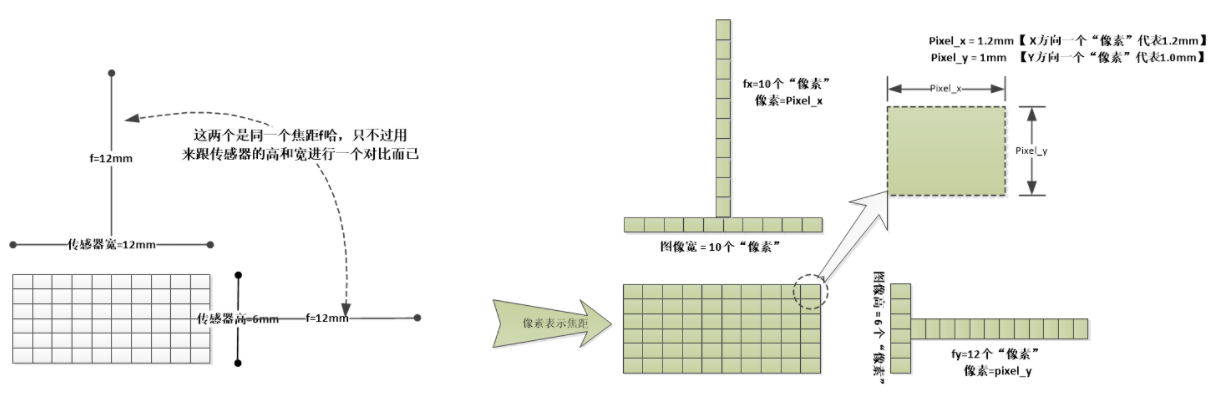
图像大小\([w,h]\),单位\(pixel\);相机焦距\(f\),单位\(mm\);视场角\(FOV-\alpha\),单位弧度;像素单元长度\(\mathrm{d}x,\mathrm{d}y\),单位\(mm/pixel\);内参\(f_x,f_x\),单位\(pixel\):
\(\boldsymbol {f_x}\)就相当于用\(x\)方向的像素数去量化物理焦距\(f\);
\(\boldsymbol {f_y}\)就相当于用\(y\)方向的像素数去量化物理焦距\(f\);
已知相机的硬件参数求内参
相机的内参出厂后就是固定不变的,如果知晓相机的出厂参数,可以计算相机的内参。
如成像传感器是\(m\times n(\mu m)\),图像尺寸是\(w\times h(pixel)\),那么图像像素单元就是
如果\(\mathrm{d}x=\mathrm{d}y\),则图像像素单元是一个正方形,此时\(\boldsymbol {f_x=f_y}\);
如果\(\mathrm{d}x \neq \mathrm{d}y\),则图像像素单元是一个矩形,此时\(\boldsymbol {f_x \neq f_y}\)。
如成像传感器是\(2000\times 1000(\mu m)\),图像尺寸是\(1000\times 500(pixel)\),那么图像像素单元就是\(\mathrm{d}x=\mathrm{d}y=2(\mu m/pixel)\),\(c_x=500,c_y=250(pixel)\)
求视场角FOV
这里只是求水平方向上的FOV,垂直方向上的FOV求法和水平是一致的。
其中,成像传感器是\(m\times n(\mu m)\),图像尺寸是\(w\times h(pixel)\),像素单元\(x\)轴方向长度\(\mathrm{d}x=\frac mw(\mu m/pixel)\),可以看到:
如果已知相机传感器尺寸,通过公式\(\ref{fisst}\)可以计算出相机的视场角\(FOV\);
如果已知相机内参,通过公式\(\eqref{second}\)可以计算出相机的视场角\(FOV\)。
通过FOV计算内参
由公式\(\eqref{second}\),可得:
如果\(\mathrm{d}x=\mathrm{d}y\),则图像像素单元是一个正方形,此时\(\boldsymbol {f_x=f_y}\);\(\boldsymbol {c_x=\frac w2 }\);\(\\ \boldsymbol {c_y =\frac h2}\)。
外参
【Extrinsics】
相机内参描述的是在相机坐标系下的点到像素坐标系下的对应关系,上文内提到的\(\boldsymbol P\)也是在相机坐标系下的点。相机在三维空间中运动,记点\(\boldsymbol P\)在世界坐标系下的点为\(\boldsymbol P_w\),在相机坐标系下的坐标为\(\boldsymbol P_c\)。
相机在世界坐标系下的位姿,由相机的旋转矩阵\(\boldsymbol R\)和平移向量\(\boldsymbol t\)来描述。此时有:
两侧都是齐次坐标,同时因为齐次坐标乘上非零常数后表达同样的含义,所以可以简单地把Z去掉:\[\boldsymbol {P_{uv}= KTP_w} \]
但这样等号意义就变了,成为在齐次坐标下相等的概念,相差了一个非零常数。为了避免麻烦,我们还是从传统意义下来定义书写等号。(《SLAM十四讲》)
式\(\ref {third}\)表明,我们可以把一个世界坐标点先转换到相机坐标系,再除掉它最后一维的数值(该点距离相机成像平面的深度),这就相当于把最后一维进行了归一化处理,得到点\(P\)在相机归一化平面上的投影:
归一化坐标可以看成相机前方\(z=1\)处的平面上的一个点,这个\(z=1\)平面也称为归一化平面。归一化坐标左称内参\(\boldsymbol K\)就得到了像素坐标,因此可以把像素坐标\([u,v]^T\)看成对归一化平面上的点进行量化测量的结果。
同时可以看到,如果对相机坐标同时乘上任意非零常数,归一化坐标都是一样的,也就是点的深度信息在投影的过程中丢失了,所以在单目视觉中没法得到像素点的深度值。
通过最终的转换关系来看,一个三维中的坐标点,的确可以在图像中找到一个对应的像素点,但是反过来,通过图像中的一个点找到它在三维中对应的点就很成了一个问题,因为我们并不知道等式左边的 \(z_c\)(深度值)的值。来源
参考博客:
高翔.《视觉SLAM十四讲》

 浙公网安备 33010602011771号
浙公网安备 33010602011771号