
动态系统的建模与分析
1.解决控制系统问题的思路:
a. 被控系统的物理分析、动态表现,在此基础上数学建模;(动力、热力、流体、经济)
b. 控制器设计;传统、PID、非线性、自适应、最佳控制;
c. 测试;仿真平台、模型样机或真实设备;实验设计;数据采集;校准
d. 不断地把测试结果与建立的模型进行比较,验证与修改模型
不管是复杂的如自动驾驶,还是简单的如烤箱温度控制,都离不开这样的分析;
动态系统的建模与分析是工作的基础,后续的工作都将在这上面完成;
一个准确的数学模型对系统动态响应的把握至关重要。
e. 模型分电力、流体、热力学、机械系统;
f. 拉普拉斯变换 + 微分方程 是表现系统动态响应的基本方法
g. 时域分析
h. 频域分析
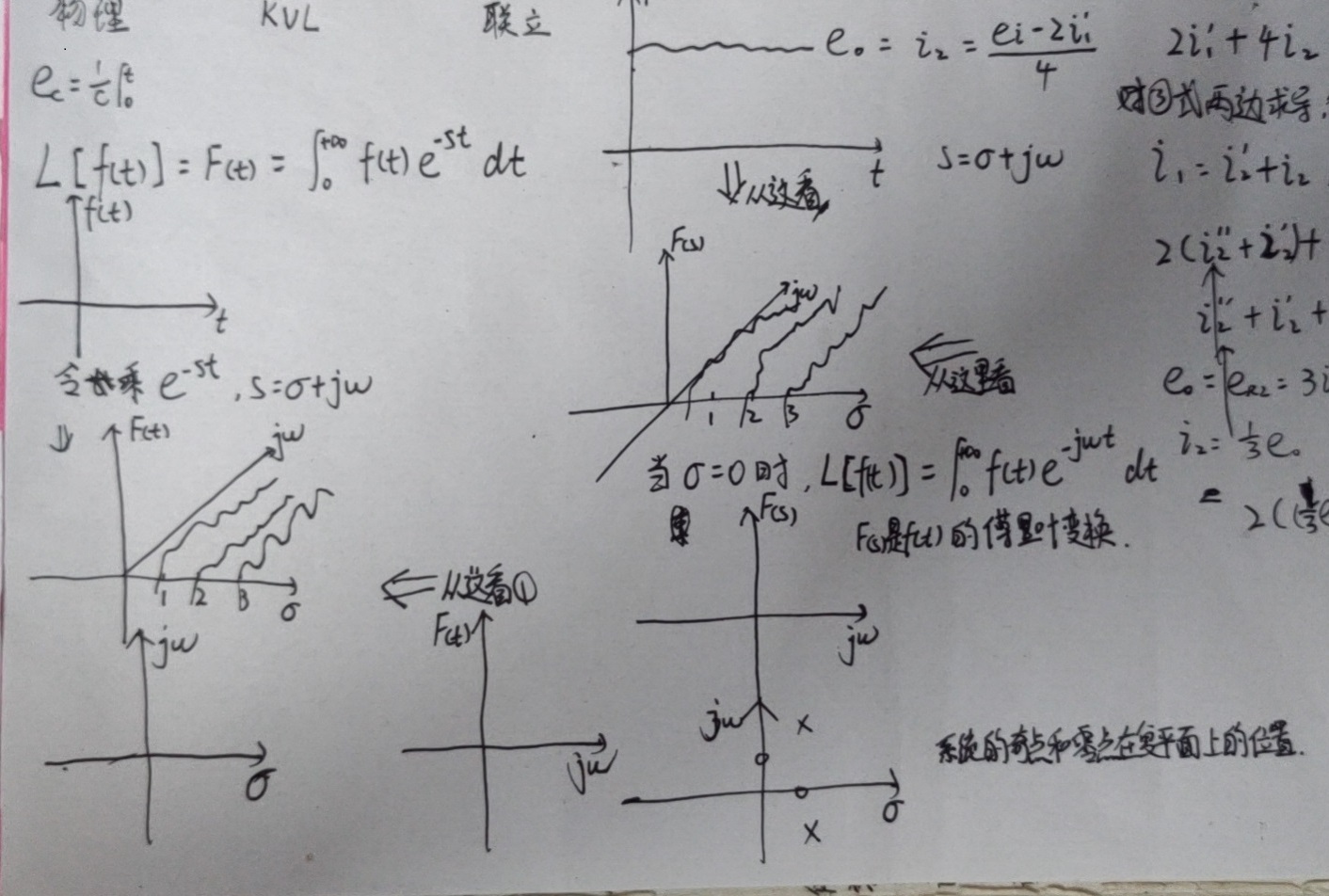
2. 电路系统建模
a. 电阻、电容、电感元件上,电压与电流的关系
b. KVL定律
c. 联立两式
3. 流体跳过
4. 拉普拉斯变换,传递函数,微分方程
a. 分析电路的变化,本质上是求解微分方程的过程
b. 输入与系统的卷积,结果就是输出
c. 计算涉及到了微分、卷积,计算分析不直观,通过拉普拉斯变换,把微分方程转为代数方程,卷积运算变成乘法运算
e. 原函数与拉氏变换后的图:
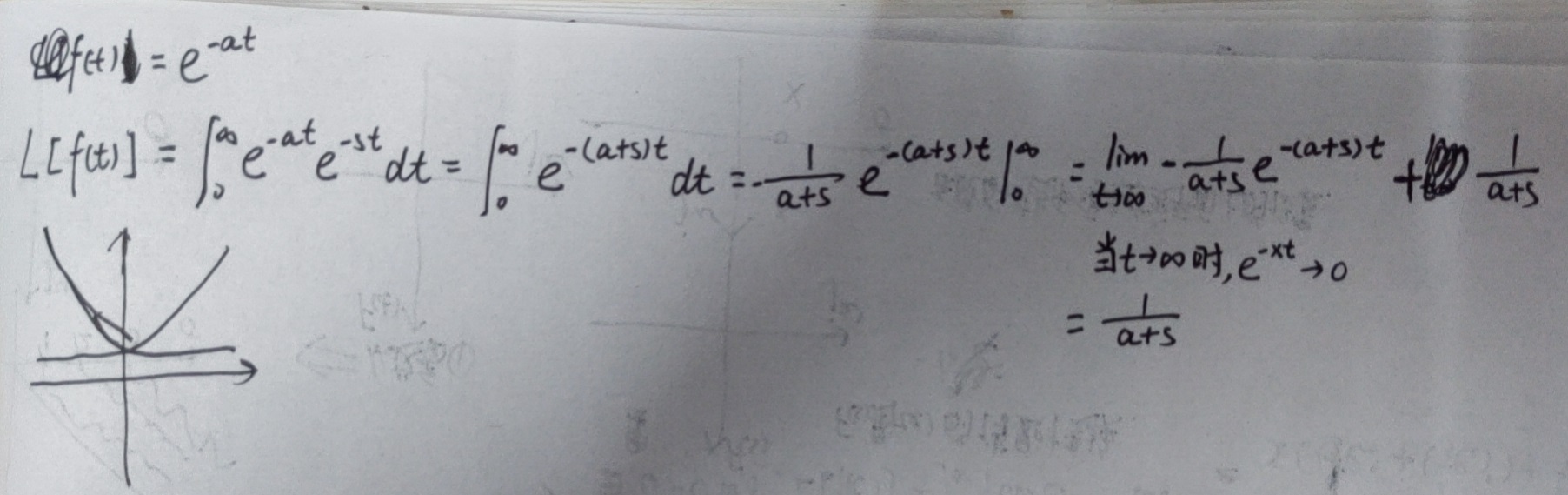
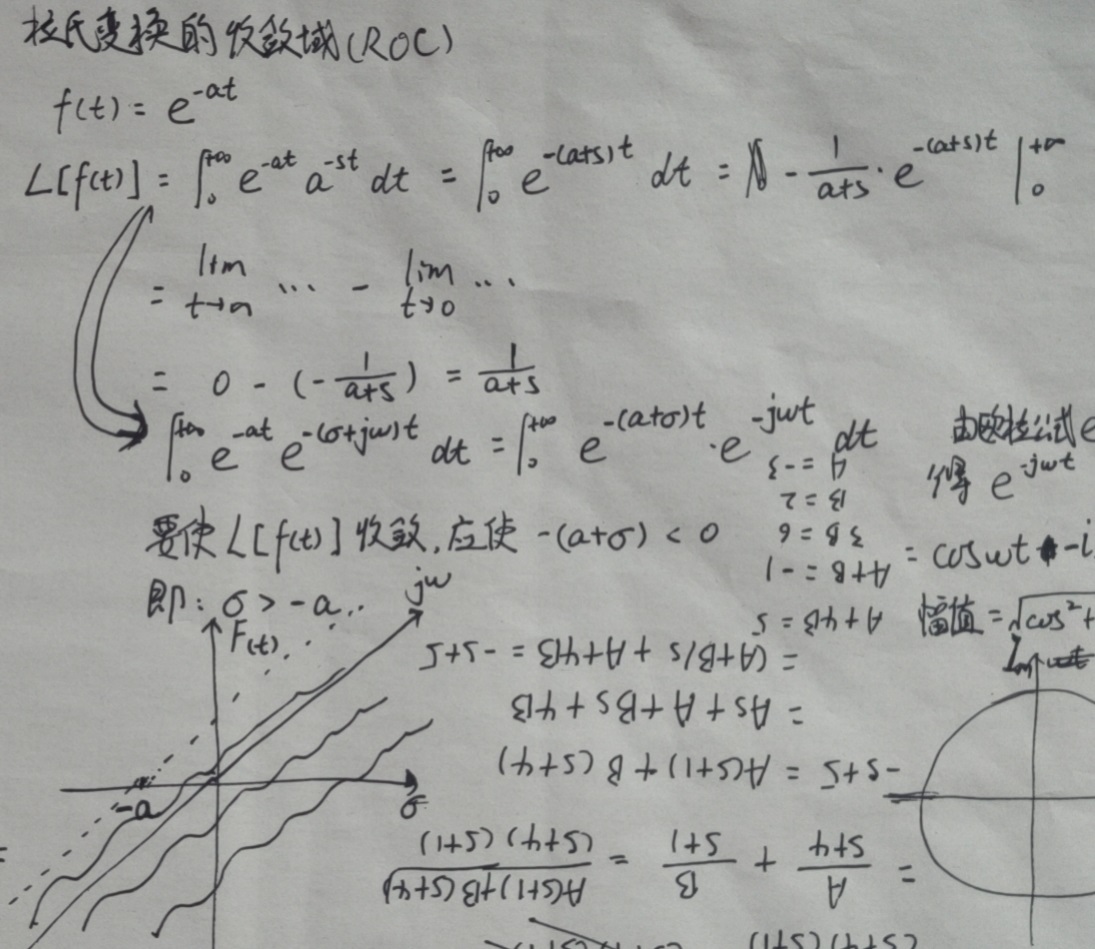
f. 指数函数的拉式变化:
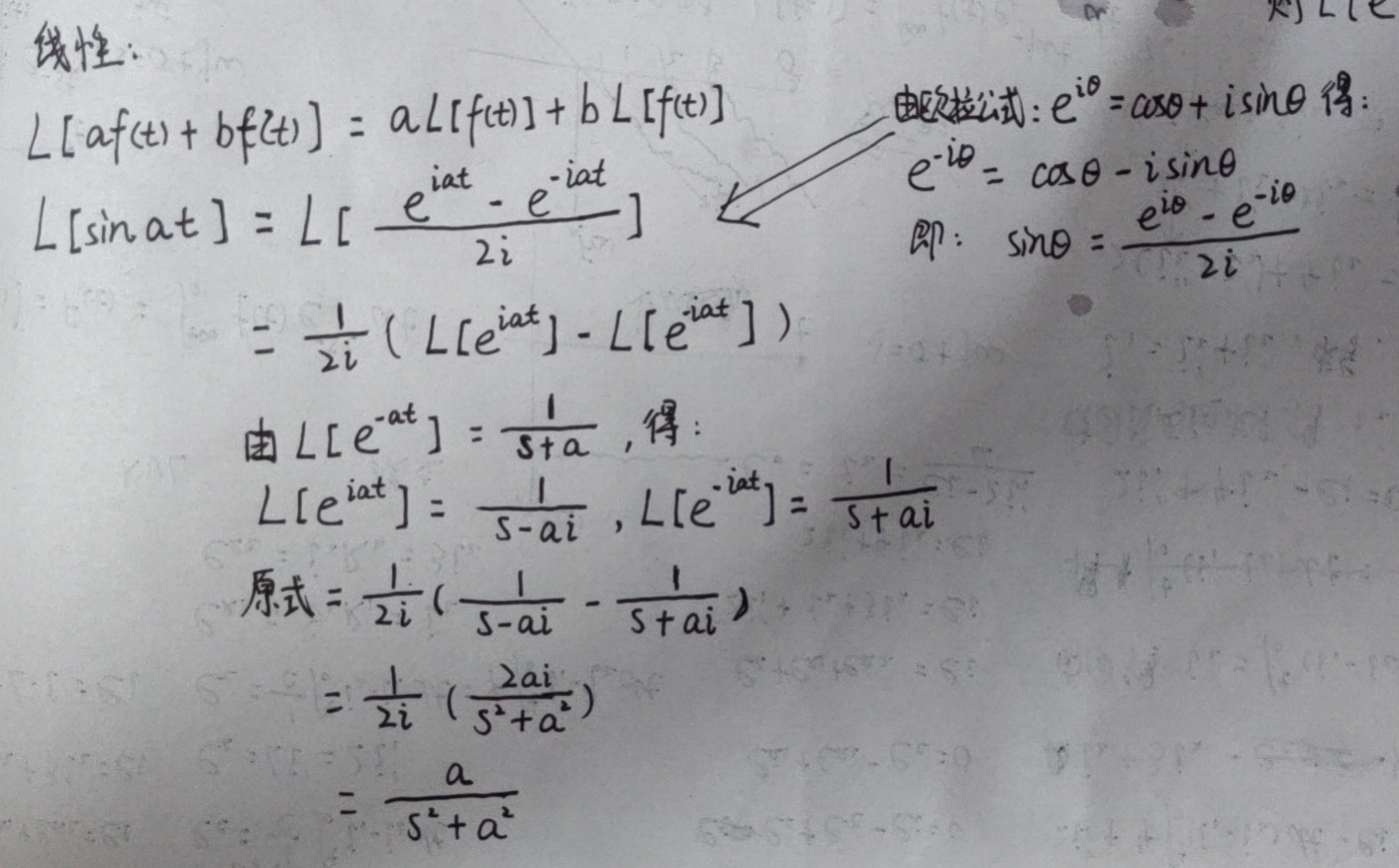
g. 正弦函数的拉氏变换:
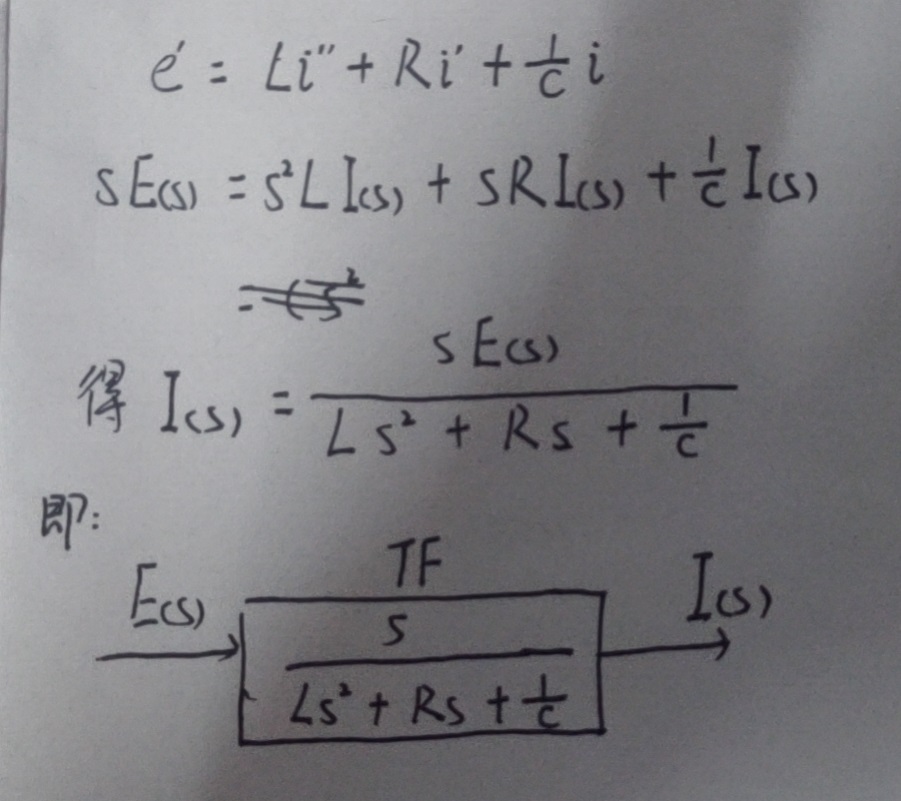
h. 运用到电路中:
Tip:之前我很难理解,或者说不能接收,为什么输出和频率扯上了关系,
现在回过头看,学习的角度不同,如果是抱着负担的心态去学理论,很难接受;
如果急需一种思路、思想、理论,来解释、解决我遇到的现实问题,那么我就能让自己去接受,
能接受会改变自己以往观念的理论。所以说学习是一个用已证明理论,来改变已有观念的过程。
要知道,一直以来,我做的更多的是了解、认知,而不是创造。(加油)
5. 拉氏变换的收敛域(ROC)与逆变换
a. 收敛域
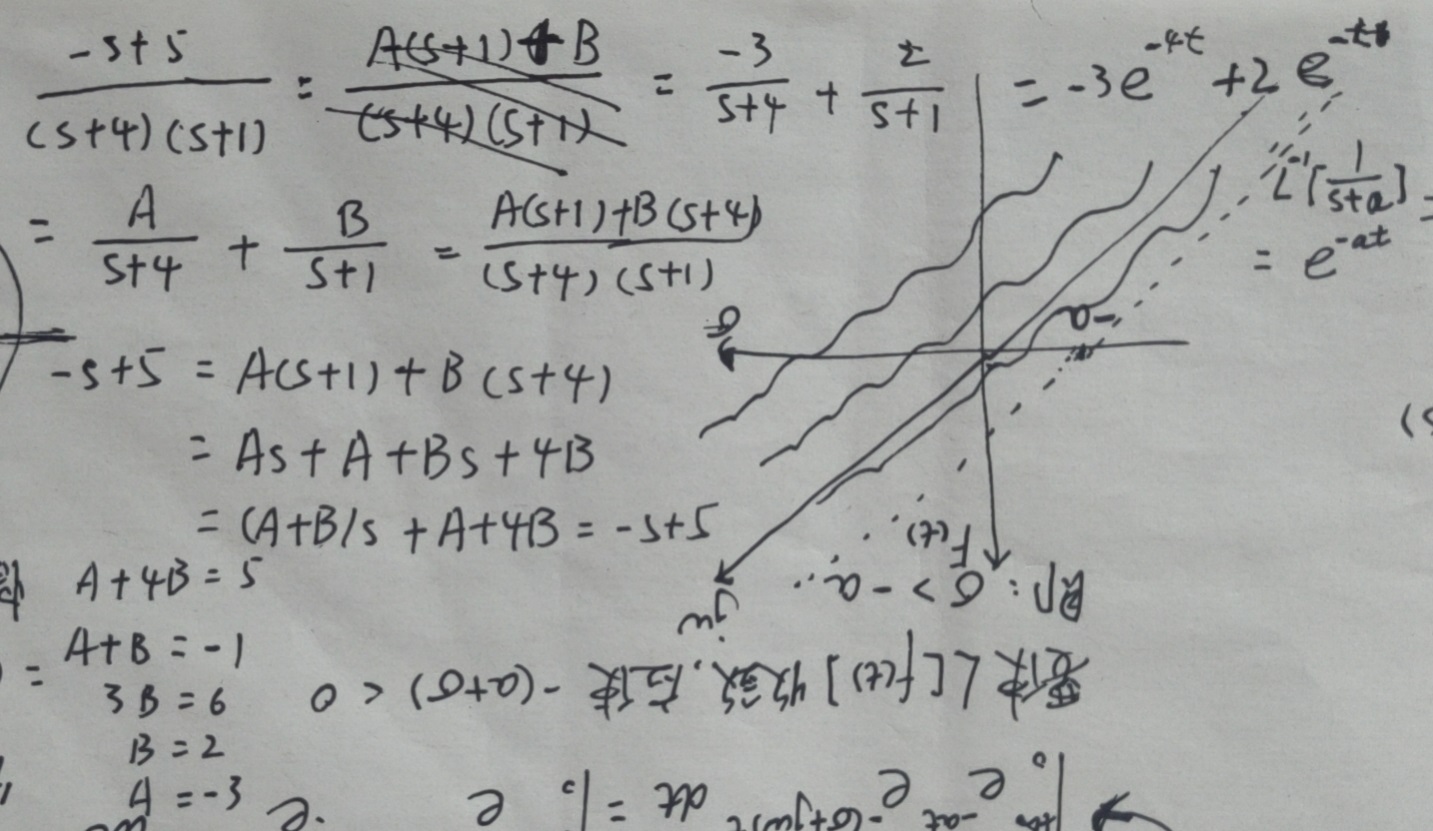
b. 指数函数的拉氏逆变换
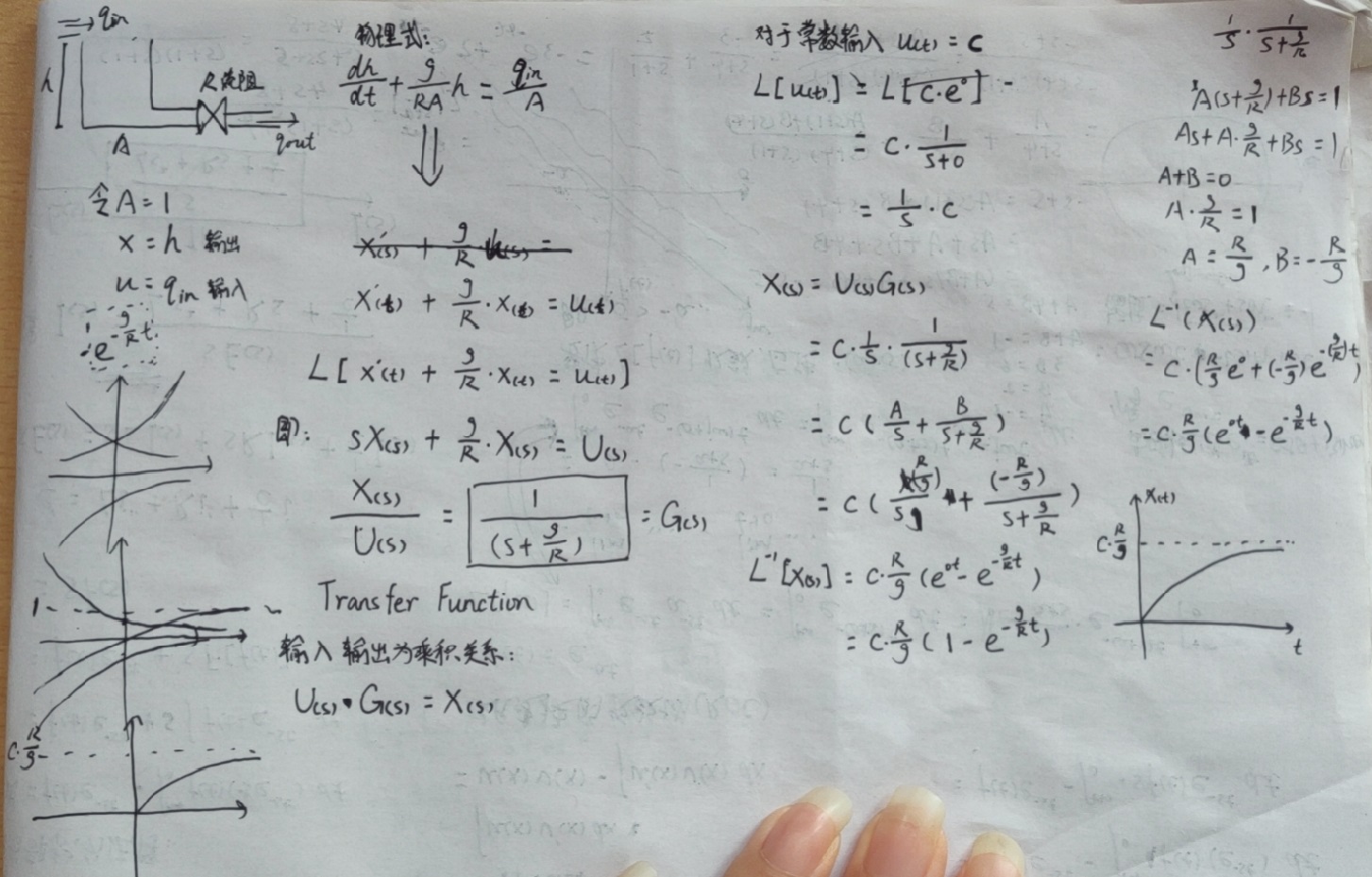
6. 传递函数与拉氏变换
a. 对后面的学习有很大帮助,经典控制如根轨迹、伯德图、信号处理
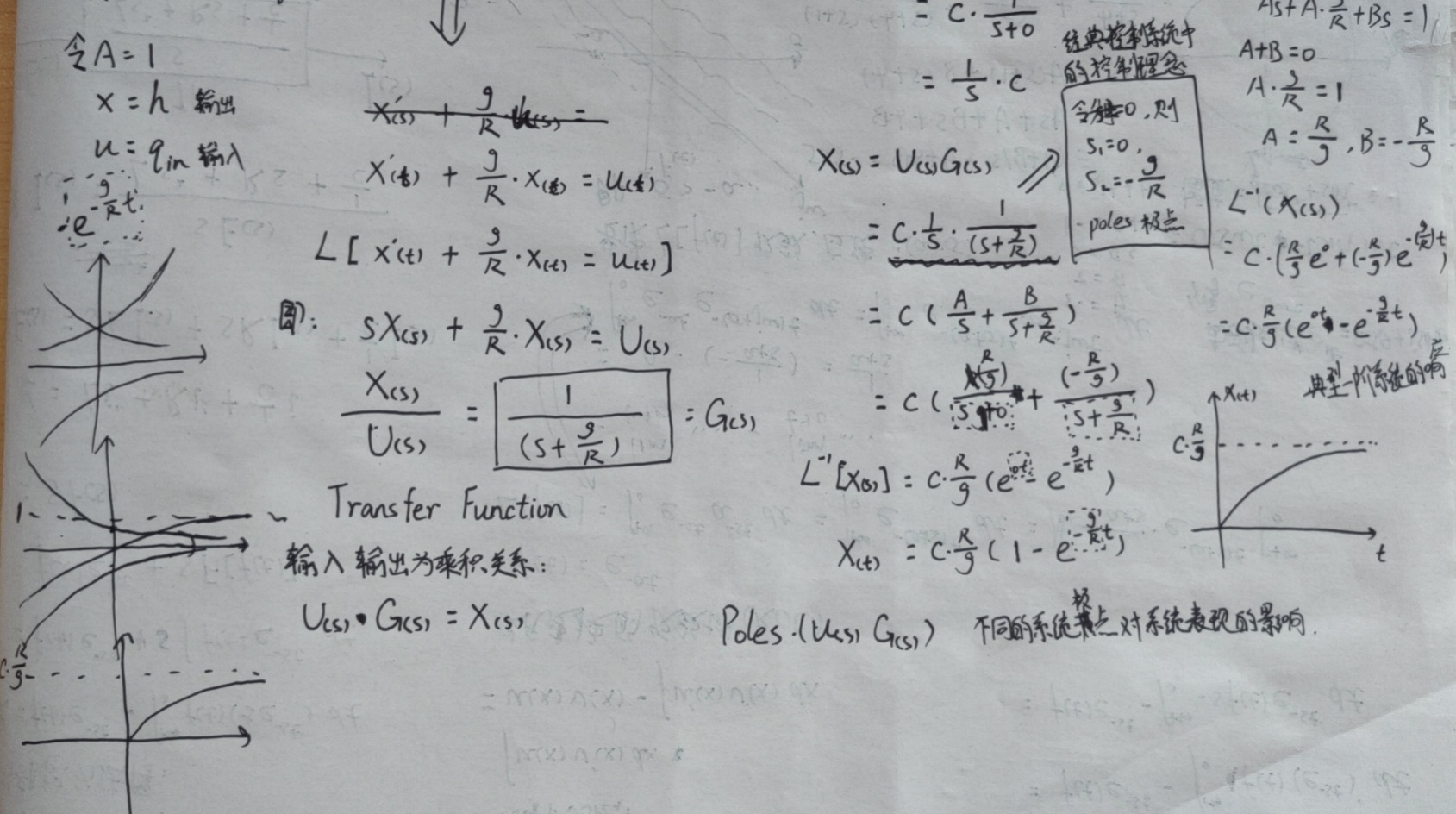
b. 流体物理式子的拉氏变换:

c. 当输入为常数时,拉氏变换与逆变换:
d. 发现指数是使函数图像收敛的关键,引出极点,经典控制理论的理念
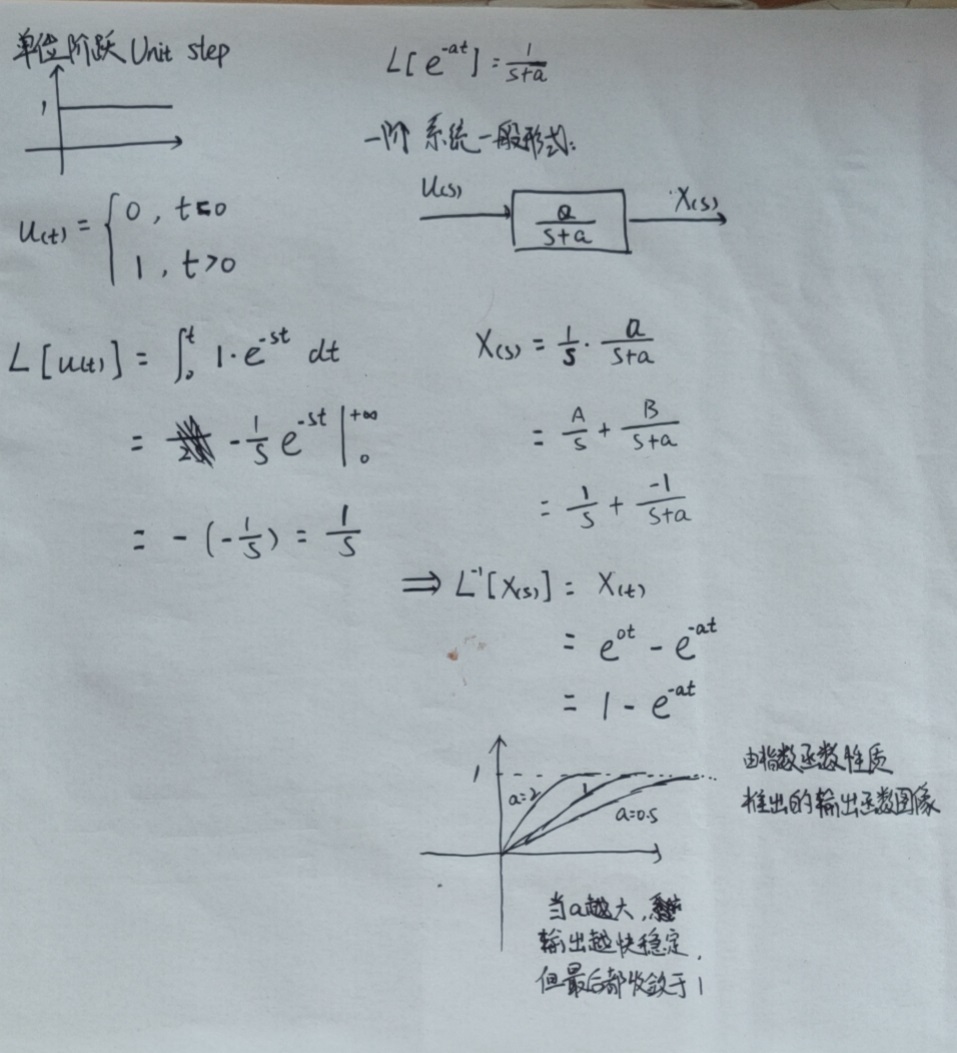
7. 一阶系统的单位阶跃响应
a. 对单位阶跃做拉氏变换,作为系统的输入;
输入 乘 典型一阶系统的传递函数;
得到输出的 拉氏变换;
对输出的拉氏变换做逆变换;
得到在时域上的输出函数,和图像;
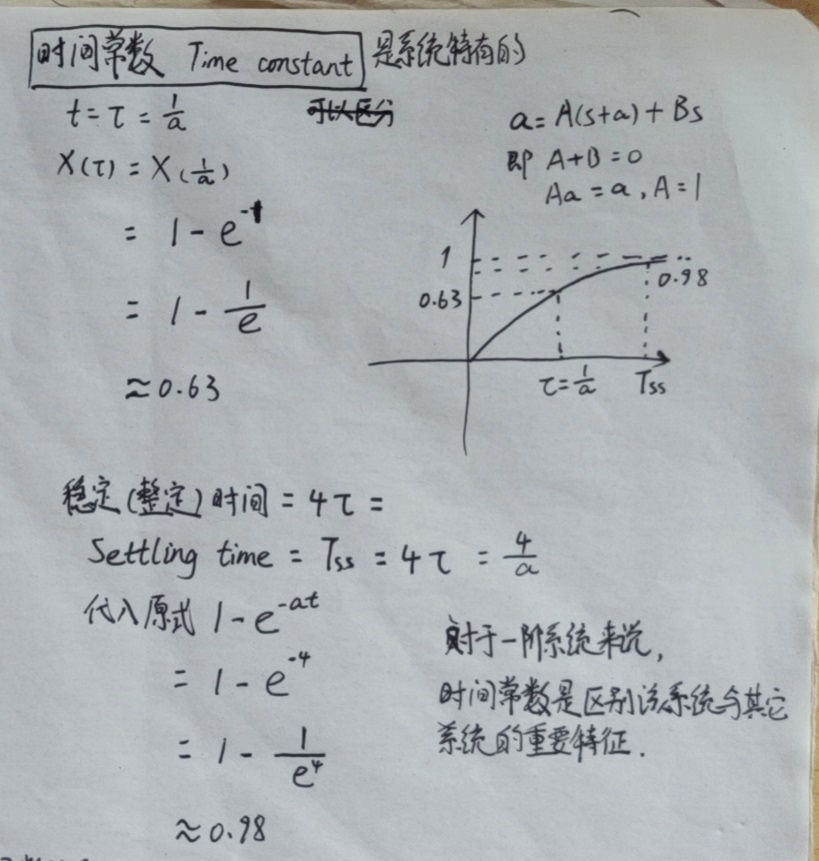
b. 一阶系统时间常数的概念
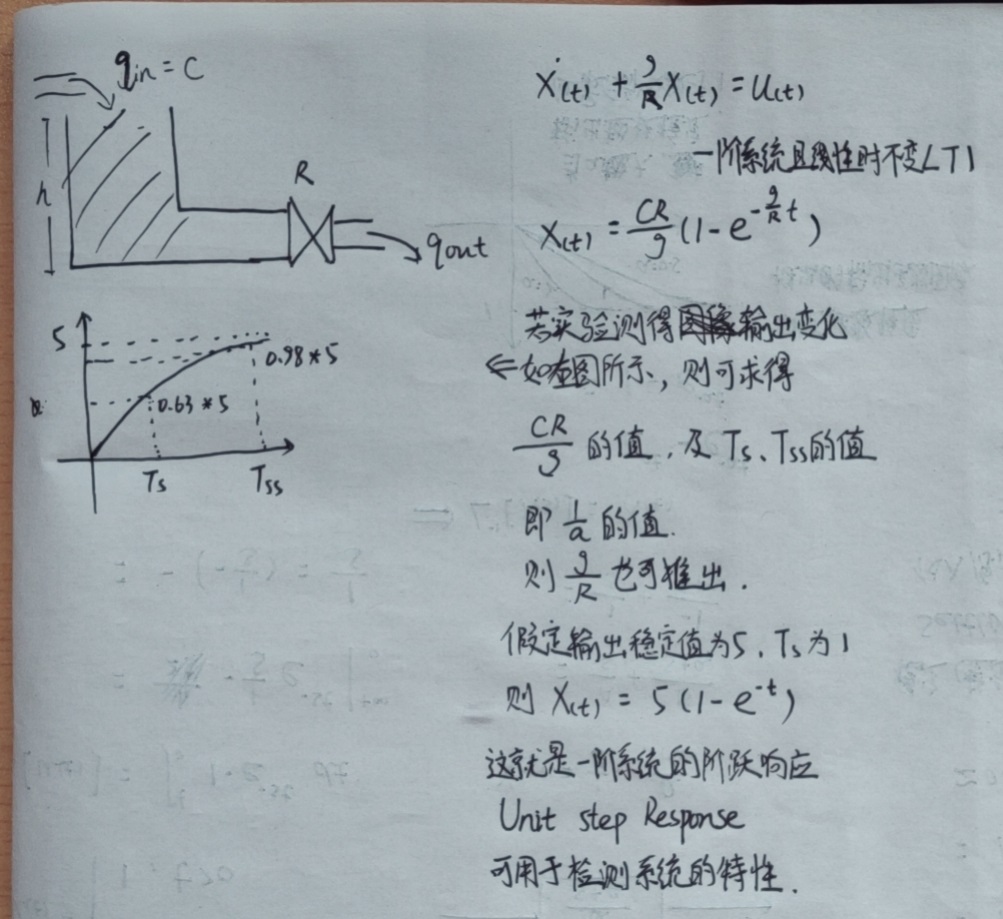
c. 由时间常数和阶跃响应,测一阶系统的系统特性
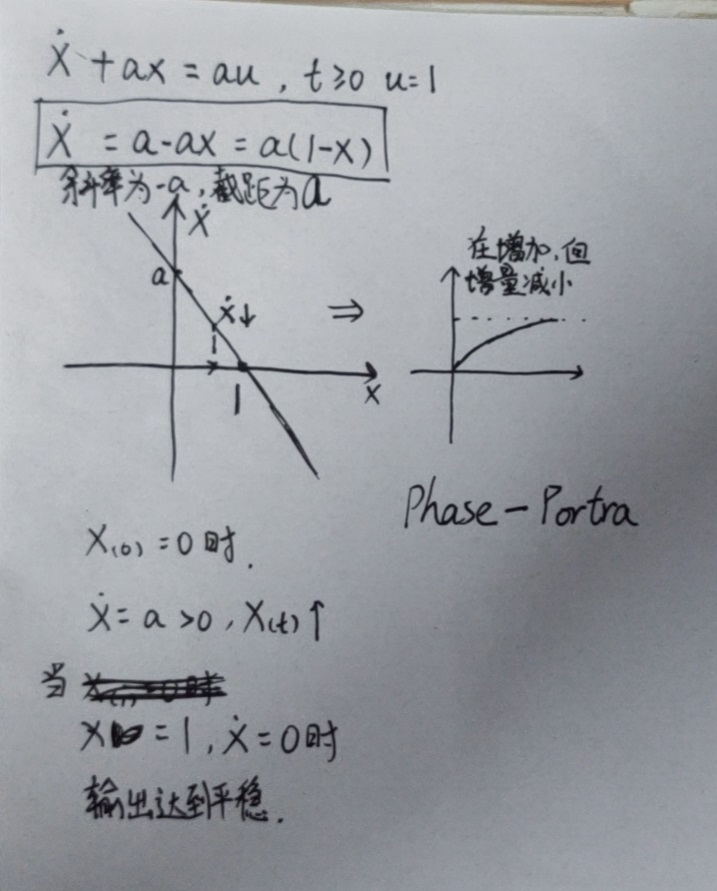
7.5 换个角度分析单位阶跃响应
8. 三角函数化简,多极点系统稳定
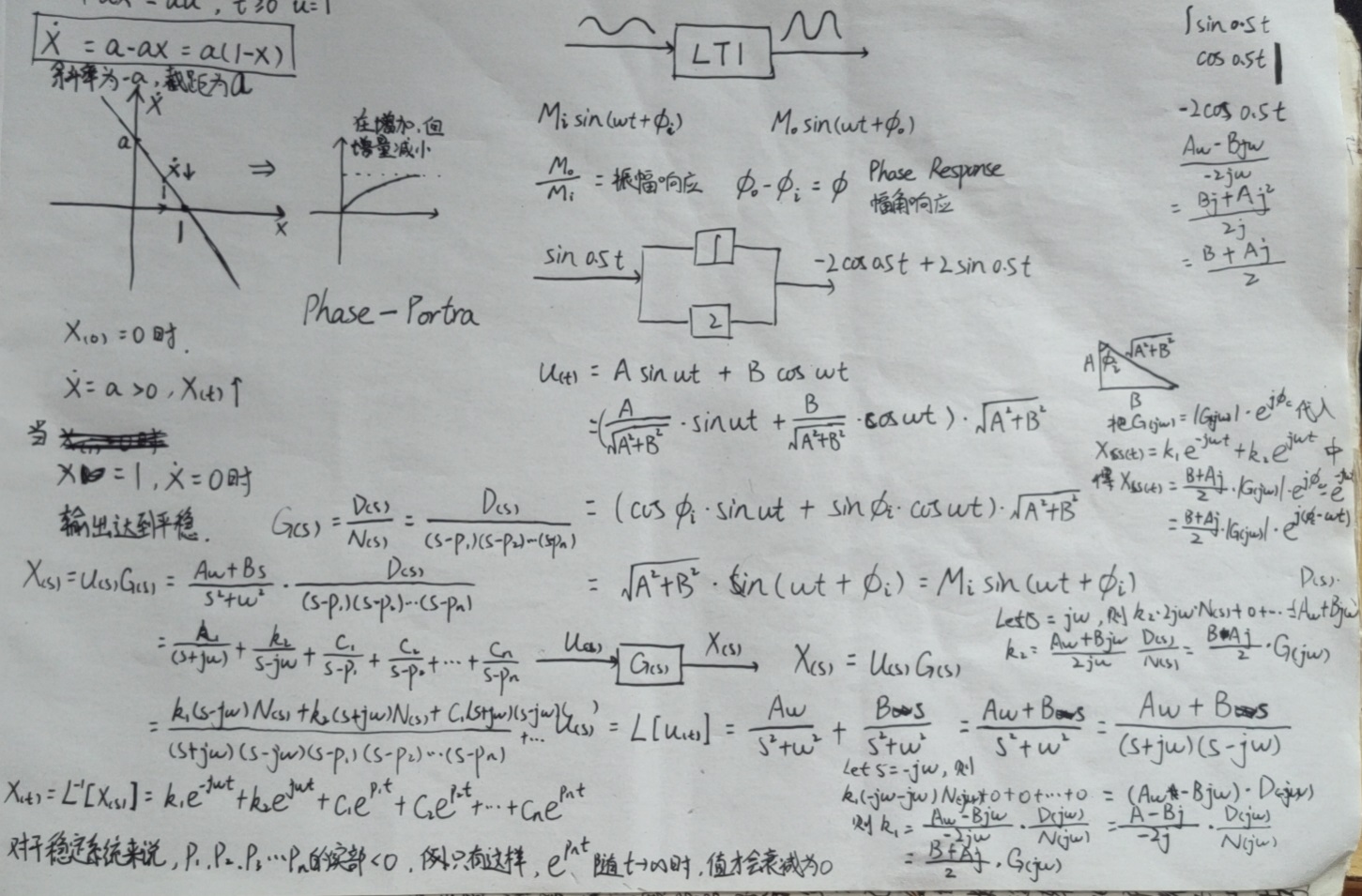
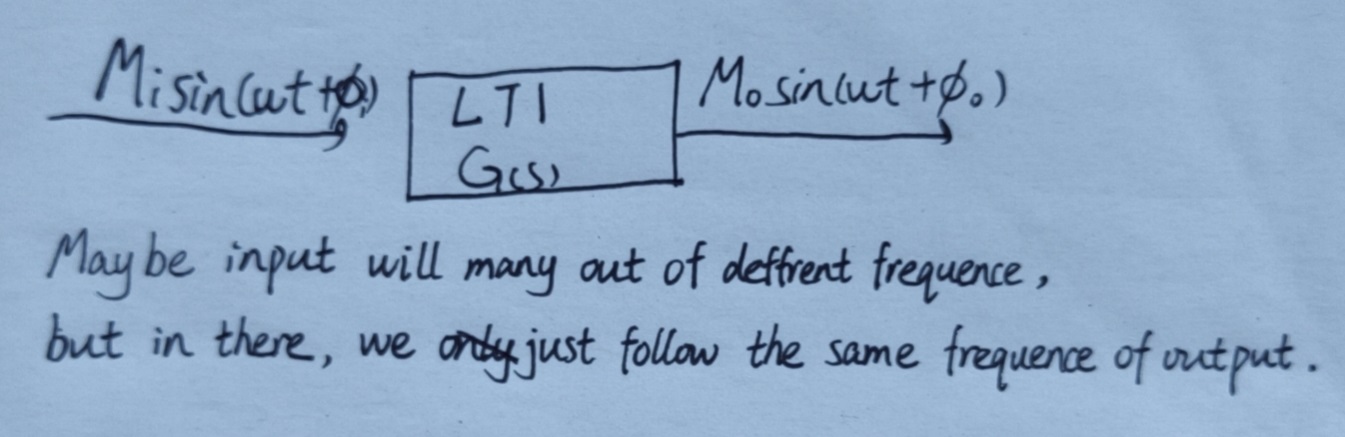
sin函数的频率响应
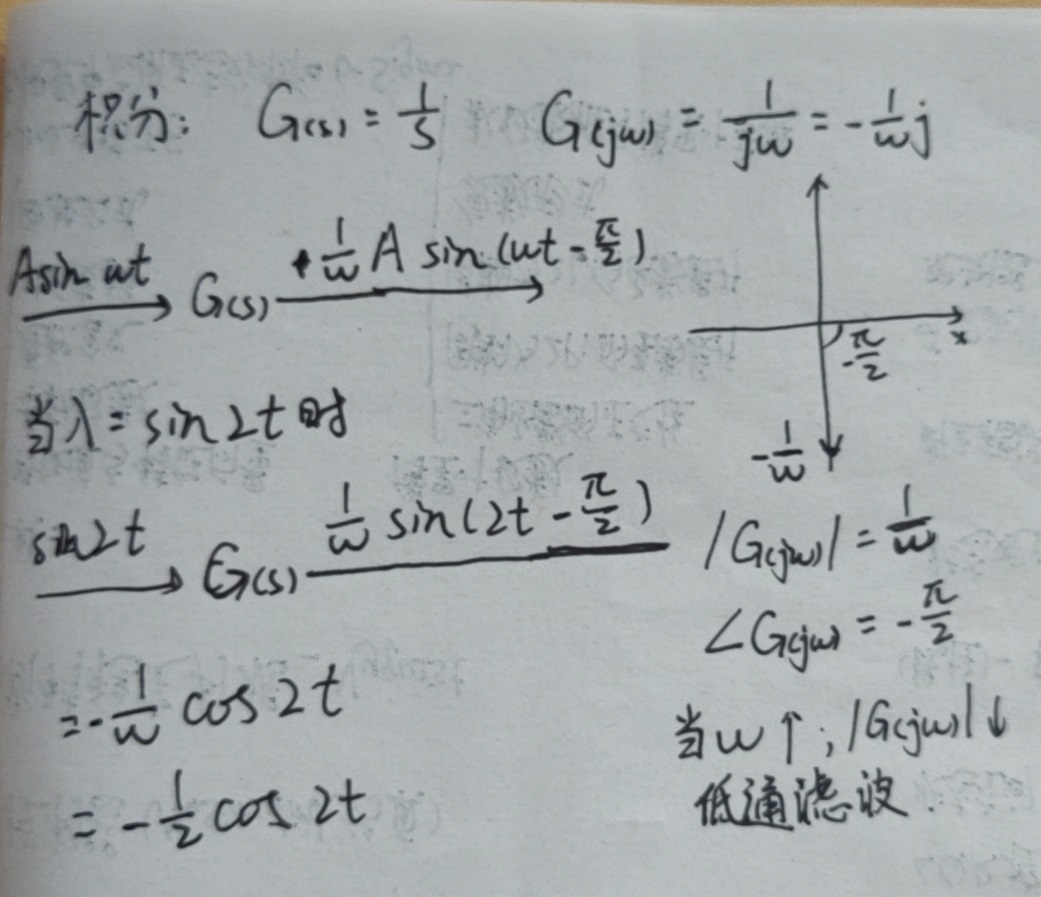
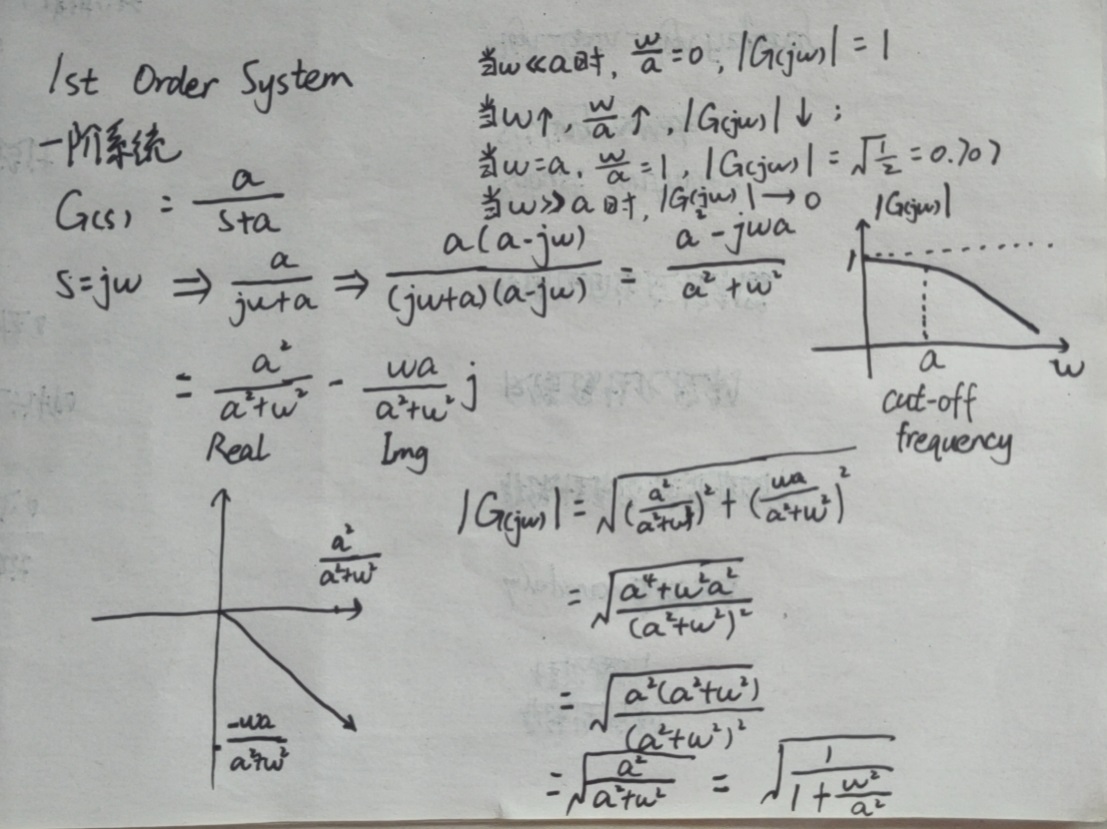
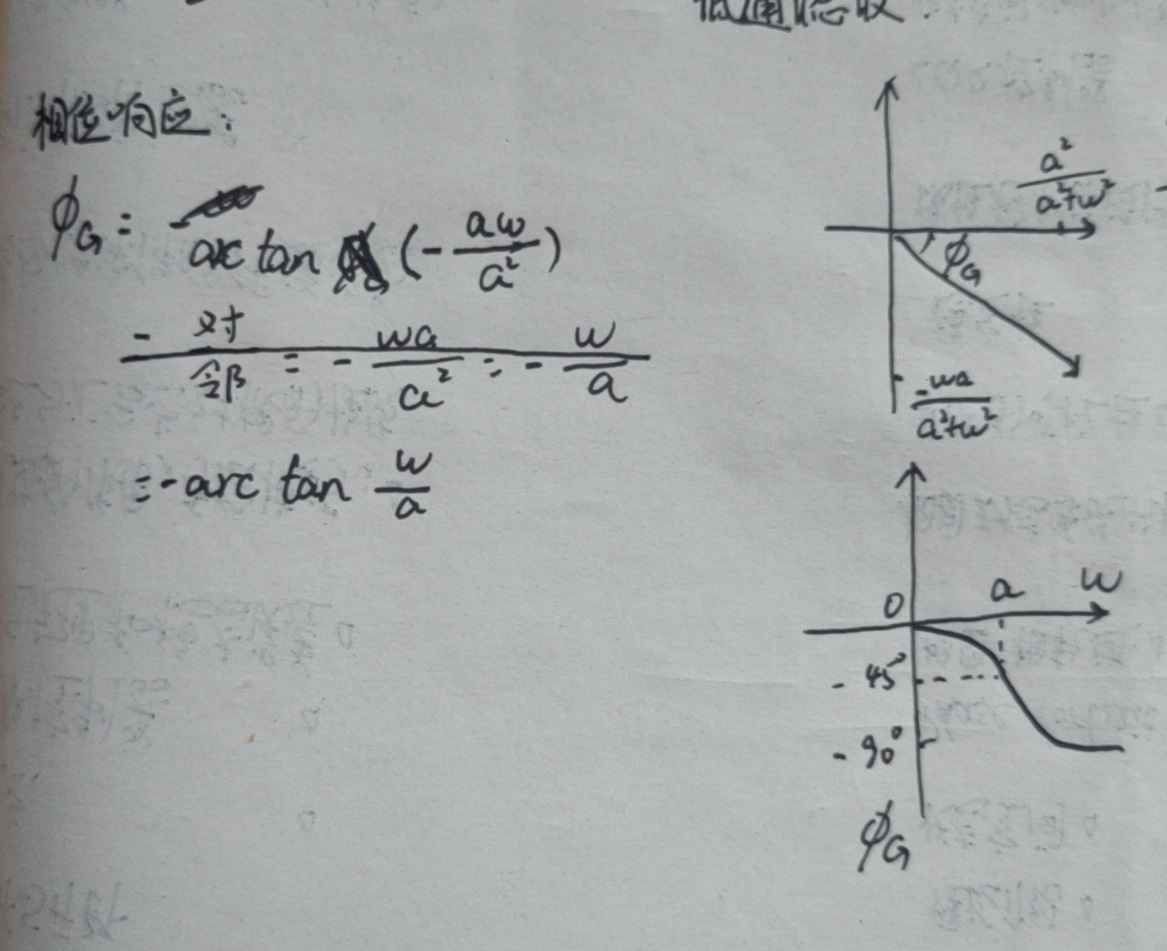
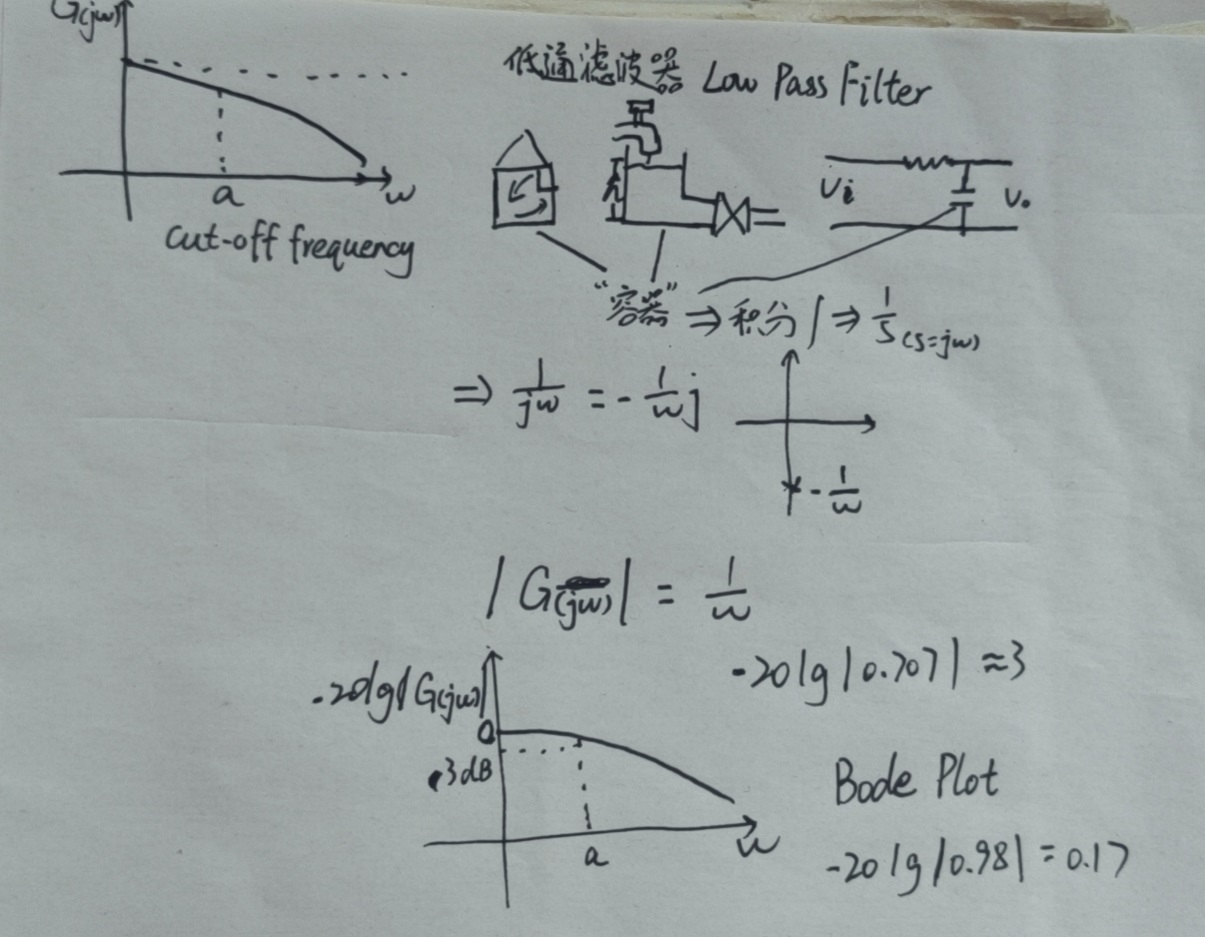
9. 一阶系统的频率响应
Tips:
PID调参的过程应该是在人工测合适的控制器参数
从上面学到的方法知道,用已知输入,给系统,记录实际输出,以此建立大致的系统模型
但仅限于一阶系统。
我想知道实际系统是几阶?它们对应的数学建模方法又是什么?
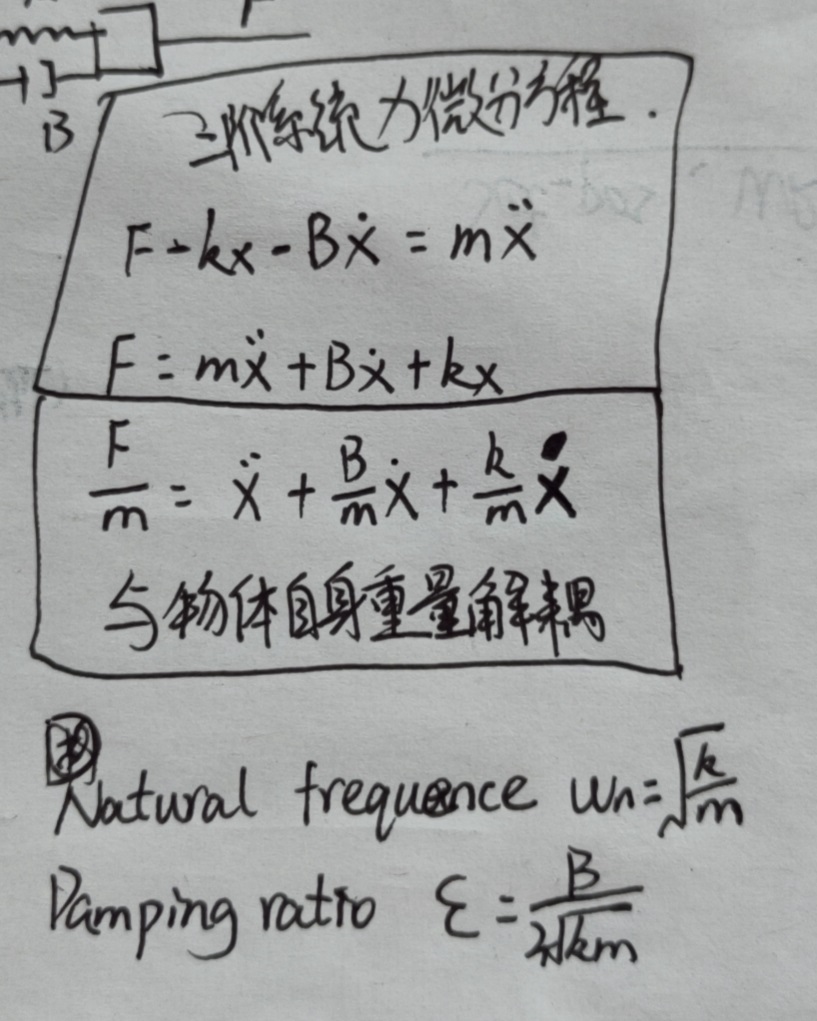
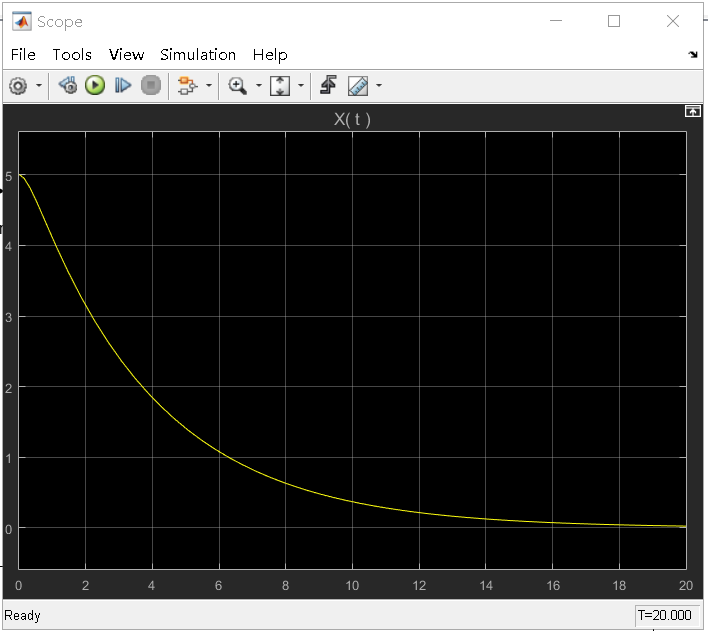
10. 二阶系统对初始条件的响应
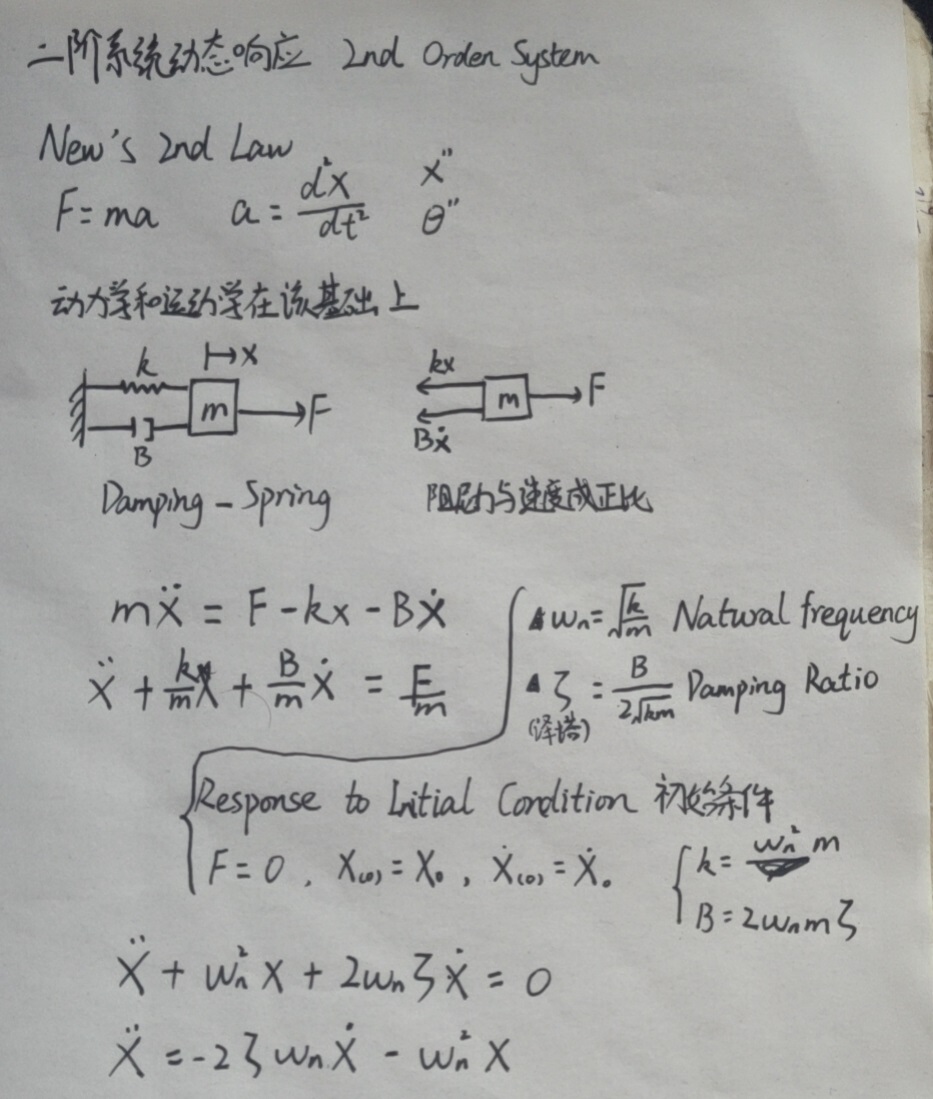
弹簧类成比例(位移),阻尼类成一阶微分(速度),合外力成二阶微分(加速度);
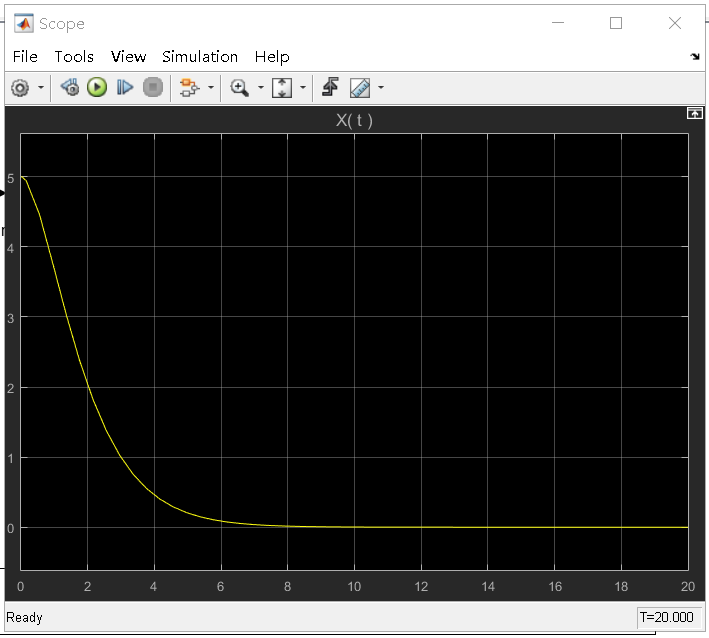
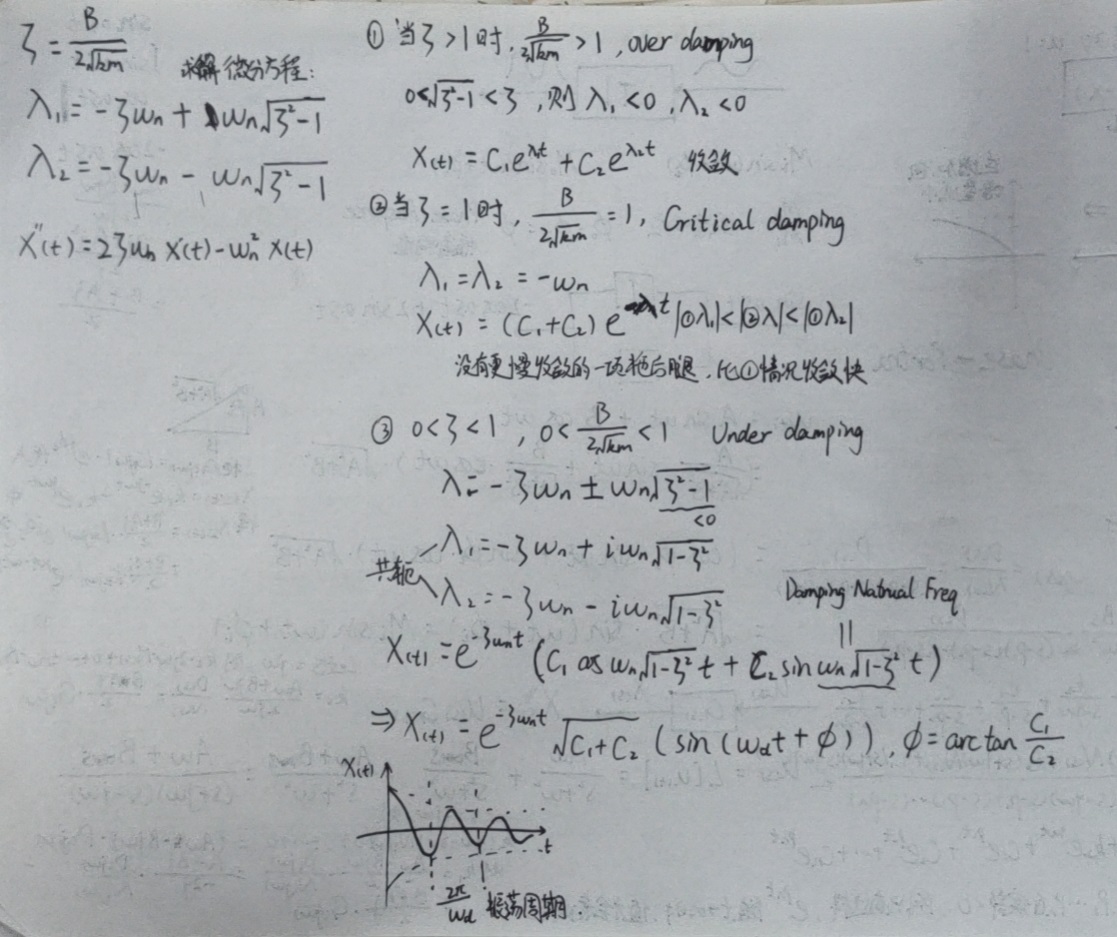
zeta > 1时:
zeta = 1:
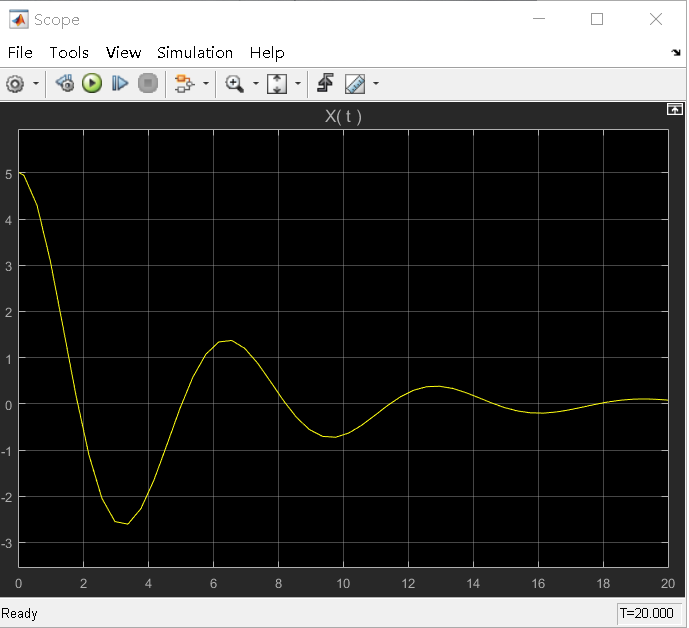
zeta < 1:
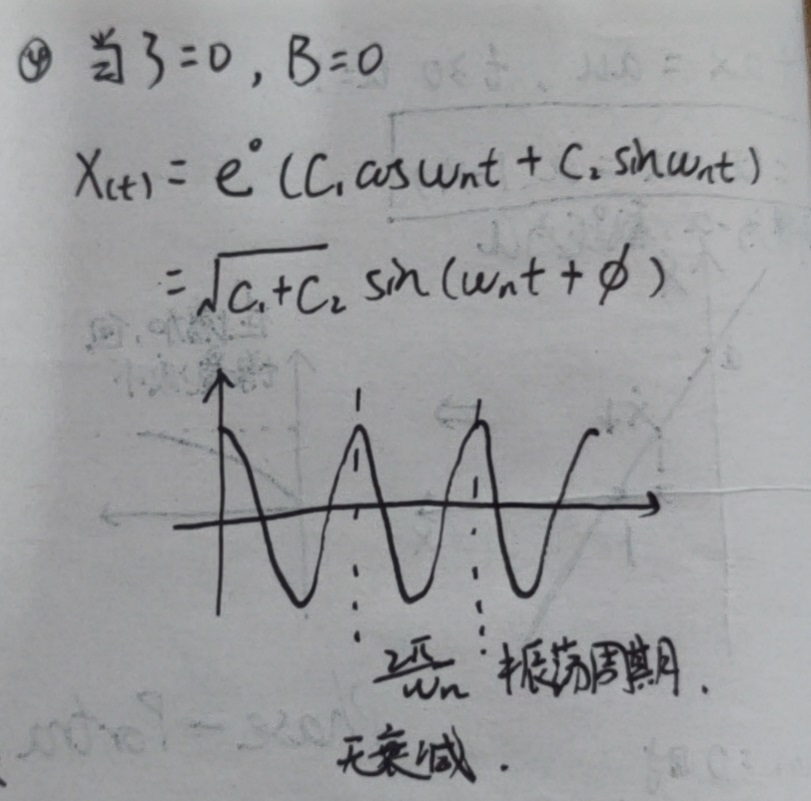
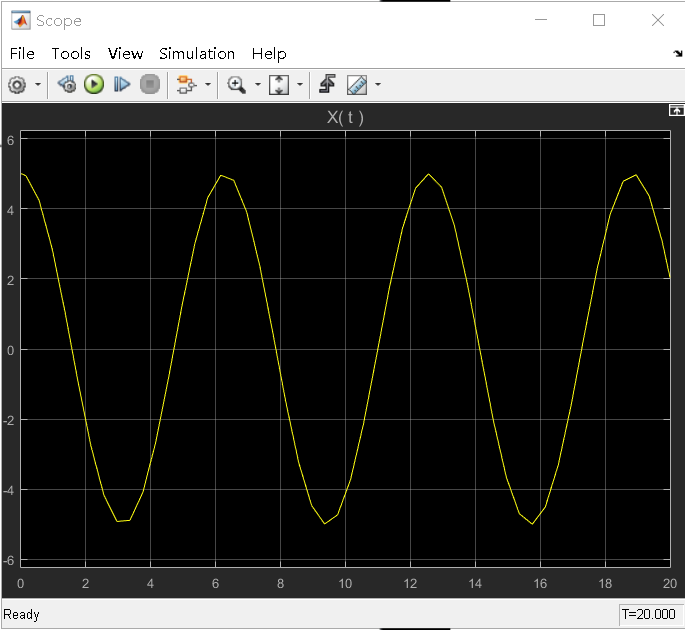
zeta = 0:
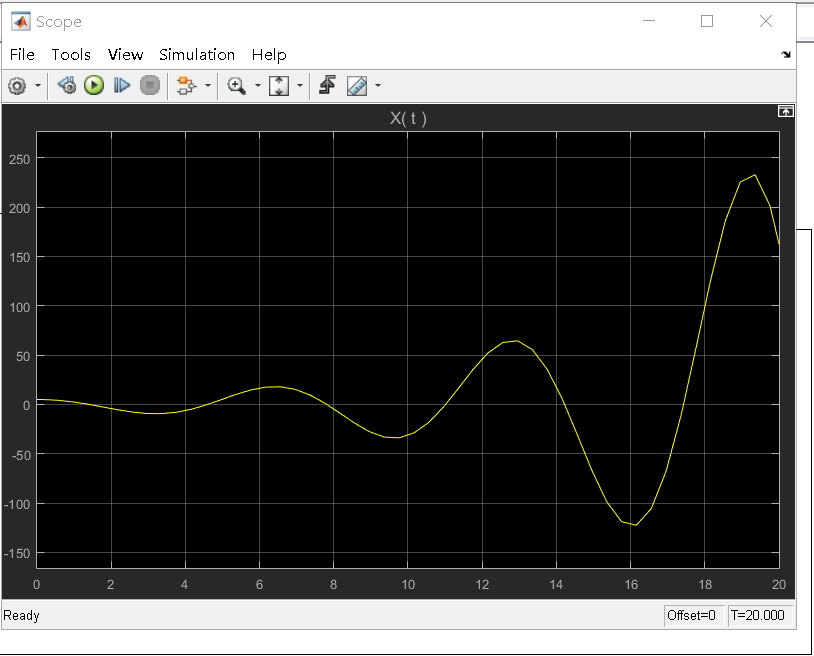
-1 < zeta < 0; zeta < -1 :
11. 二阶系统的单位阶跃响应
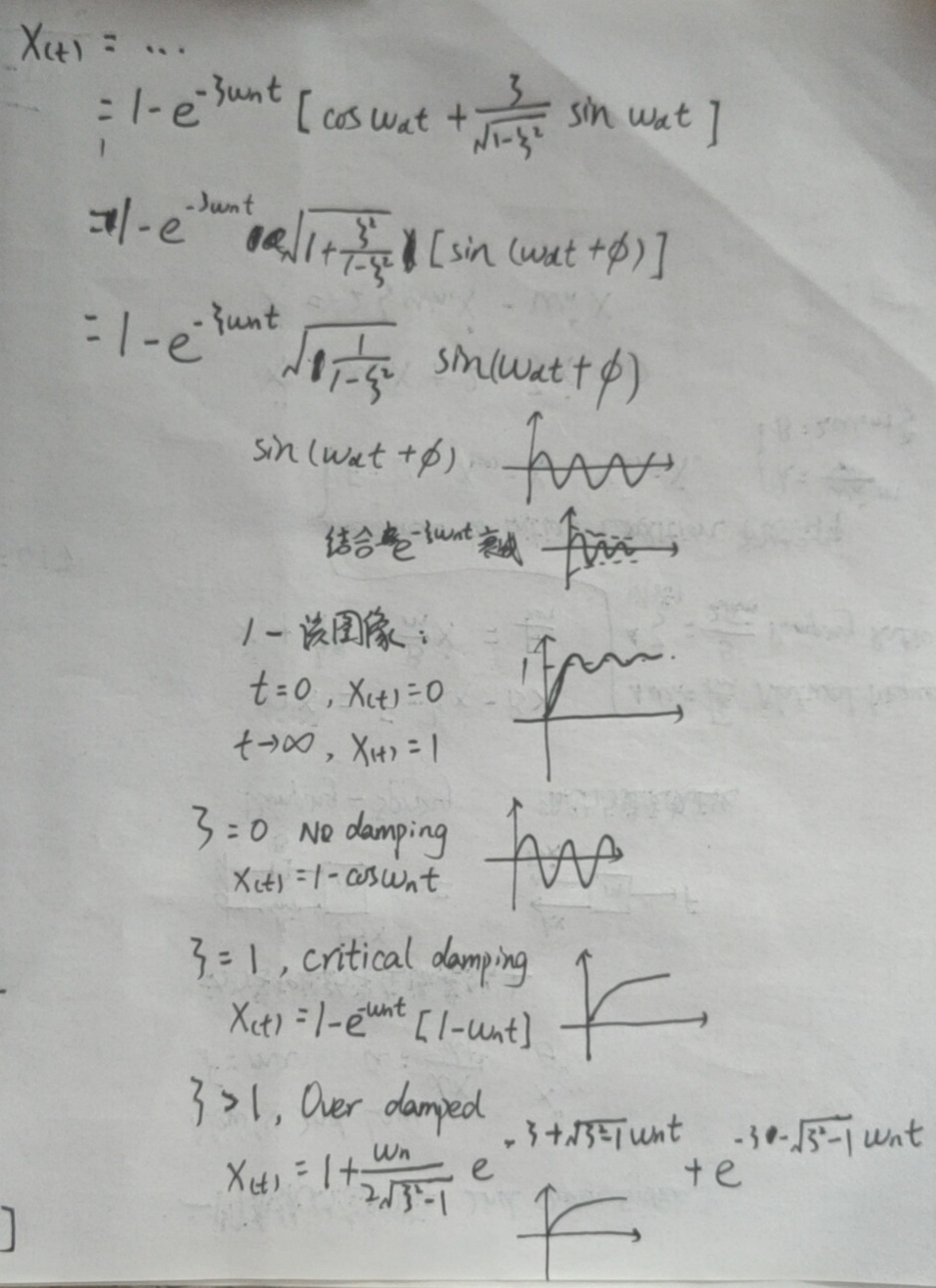
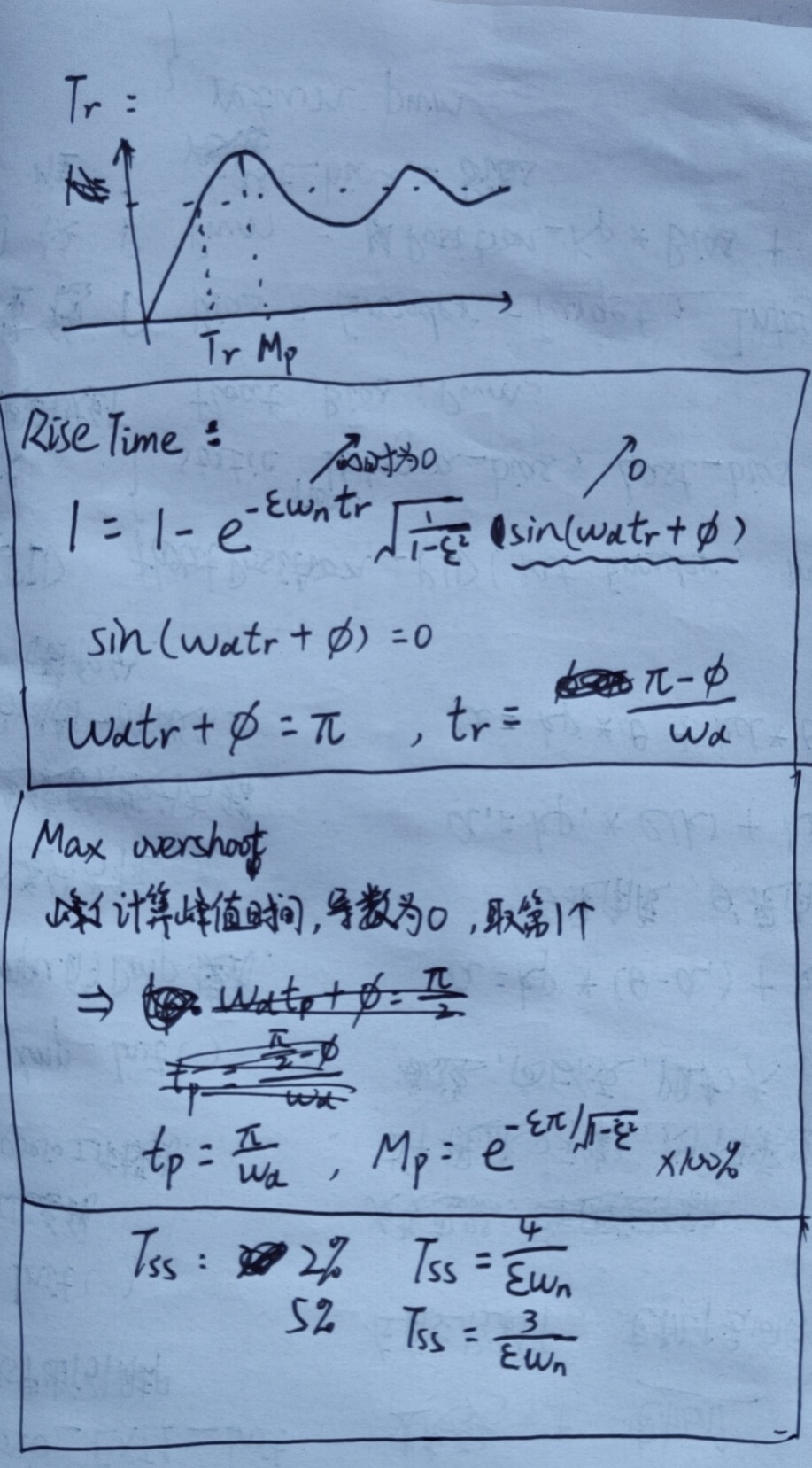
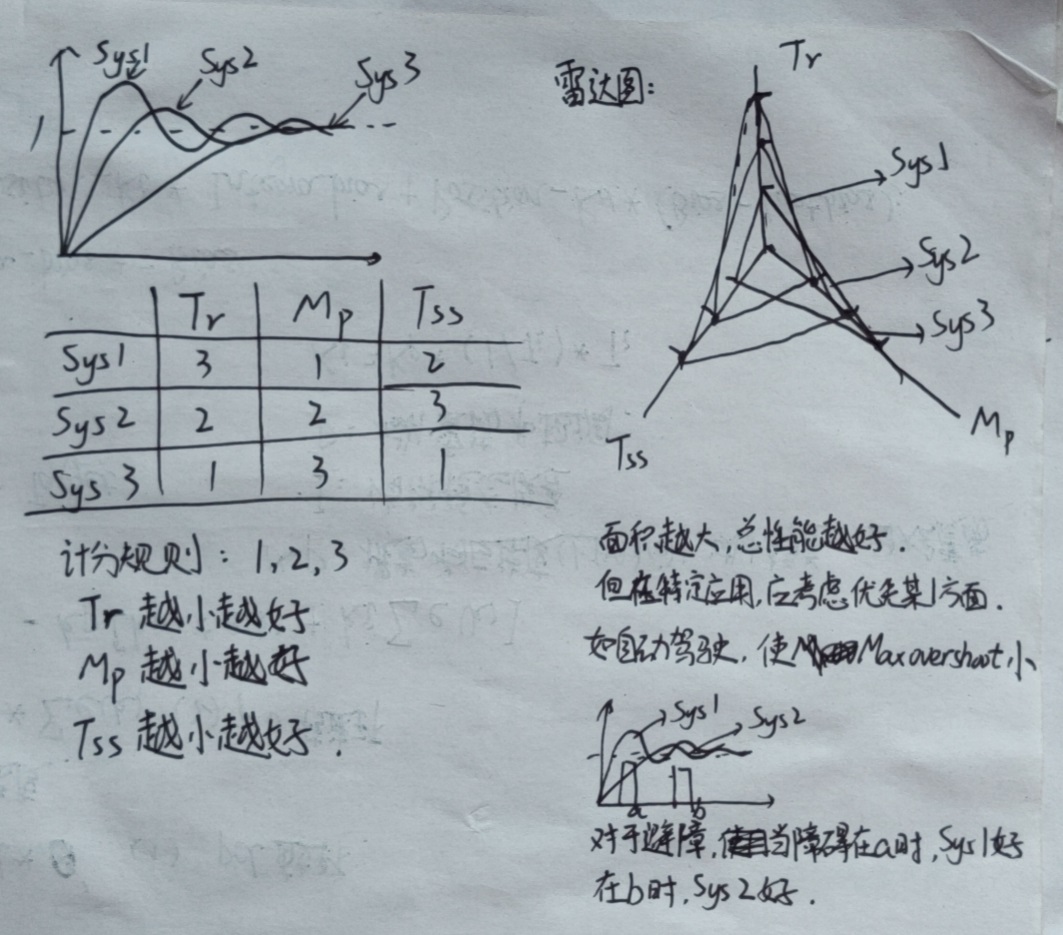
12. 二阶系统的性能分析与比较
13. 共振现象、二阶系统频率响应
14. 二阶系统频率响应(数学推导)
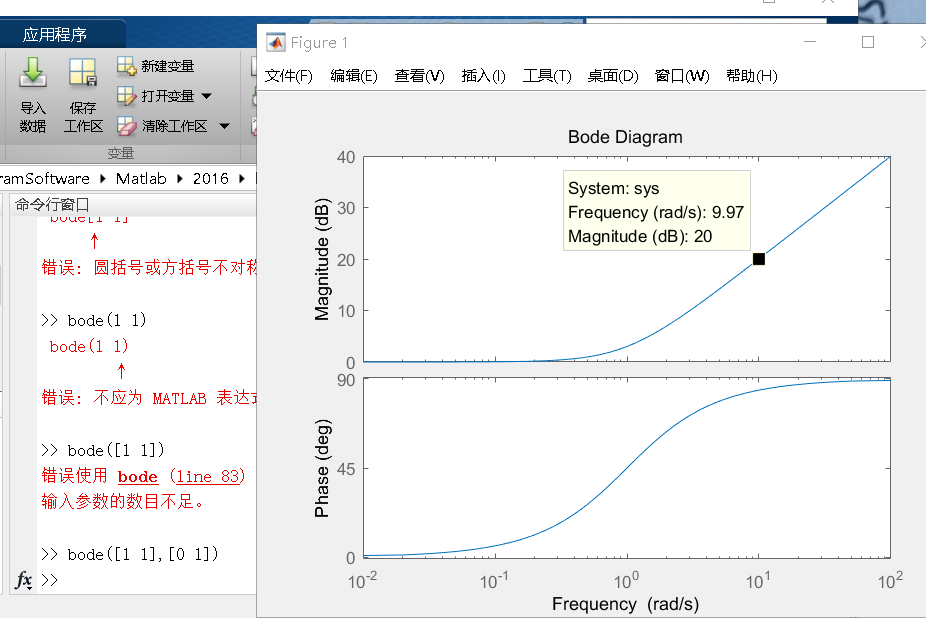
15. 伯德图
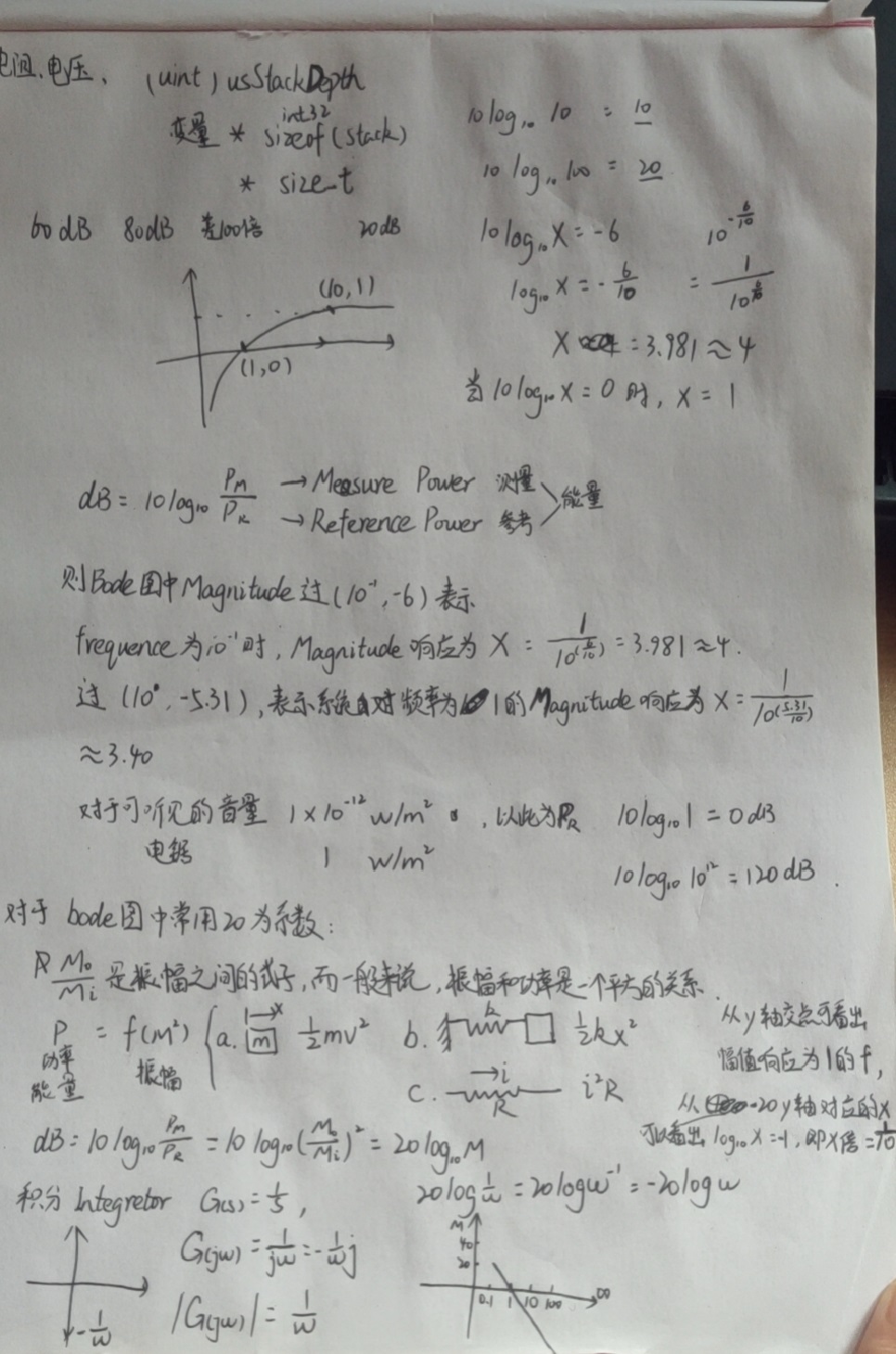
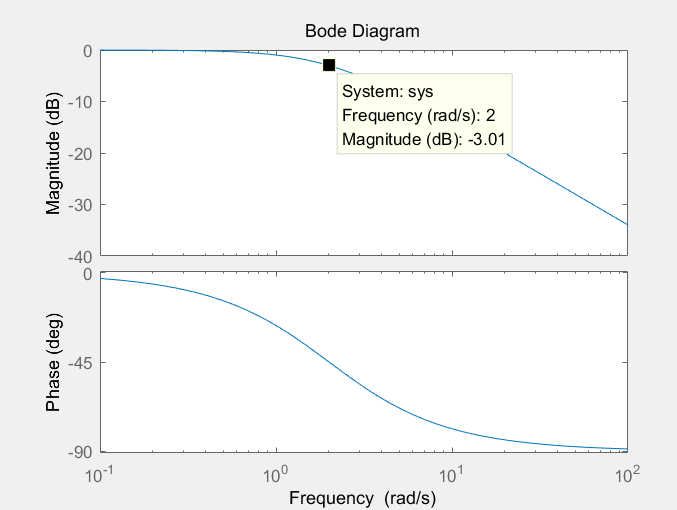
bode([0 1],[1 1])
bode([0 2],[1 2])
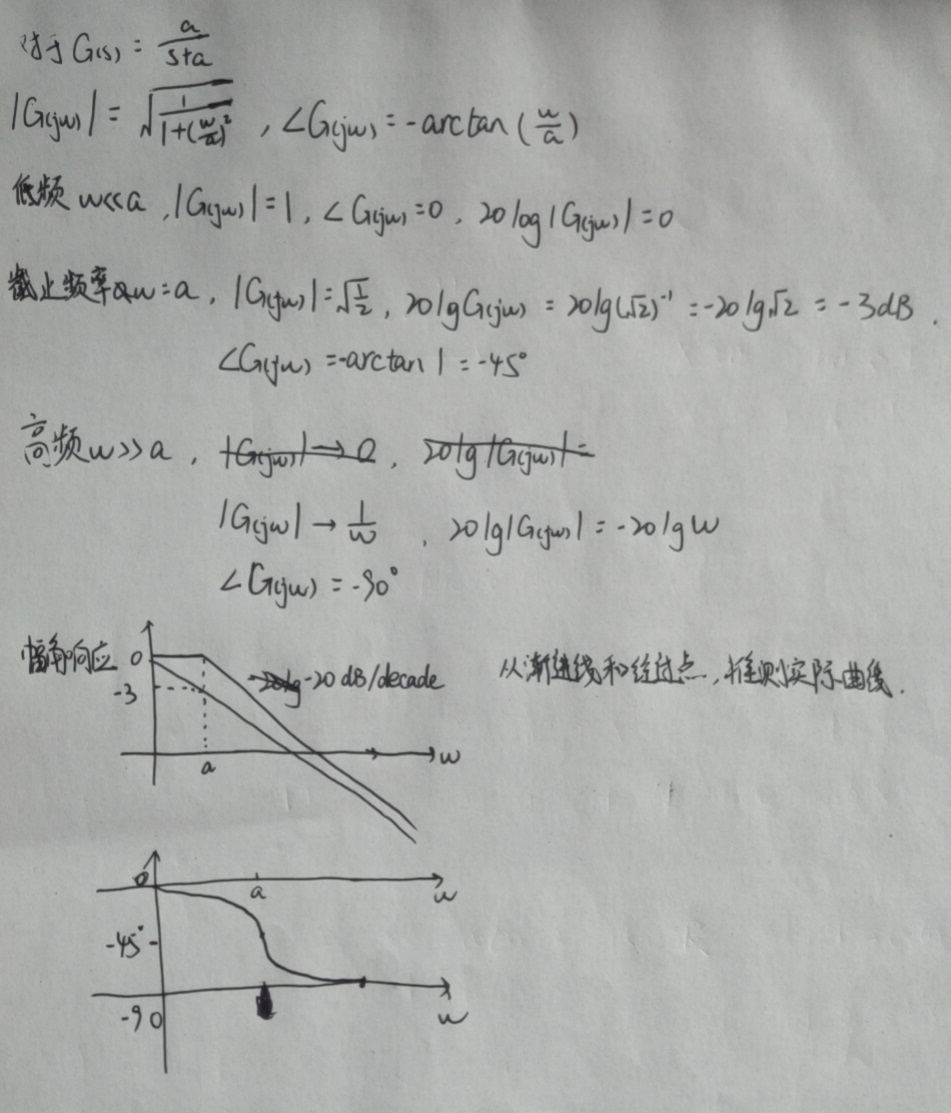
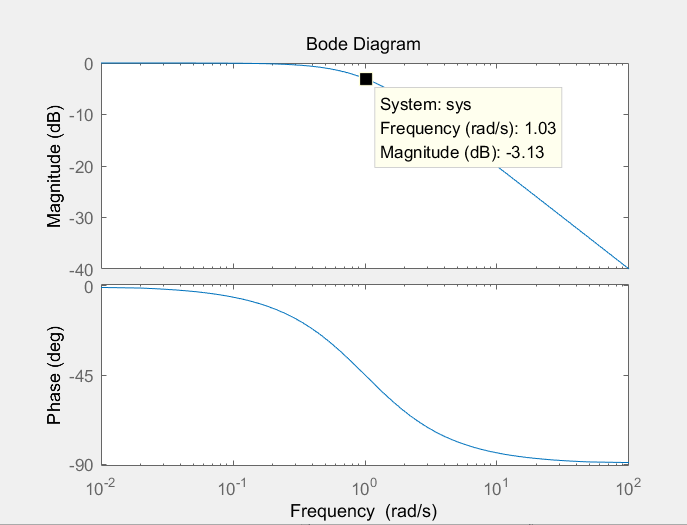
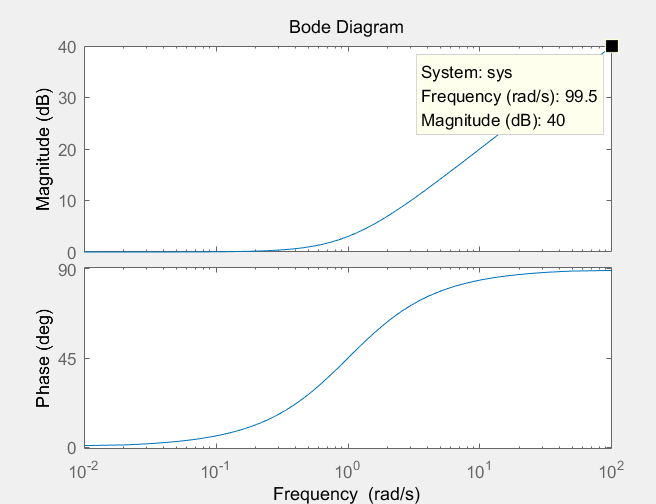
G(s)= s + 1时,伯德图如下:
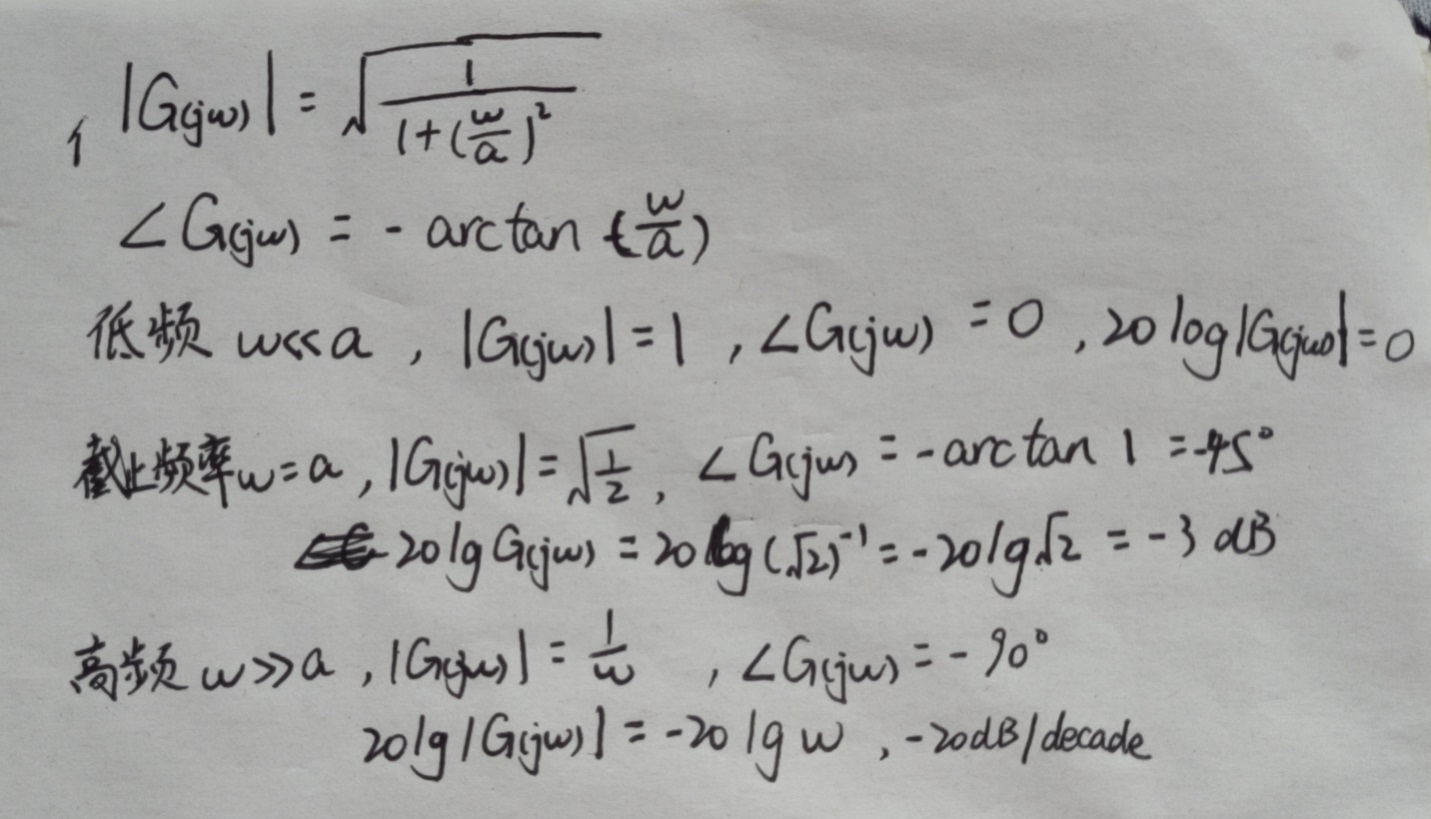
可以看出,
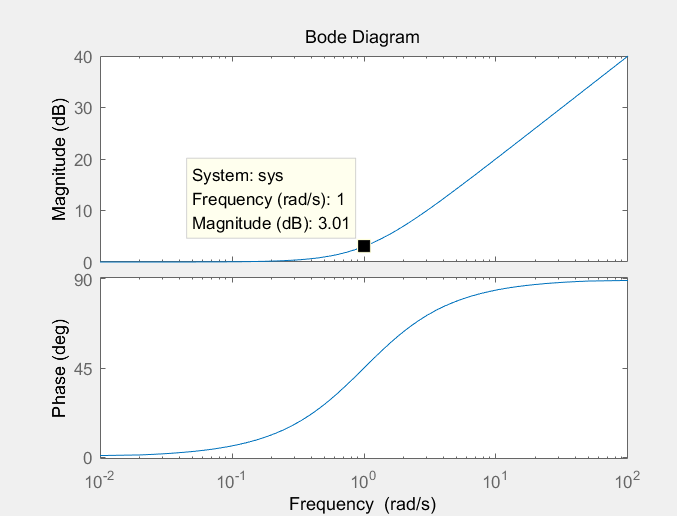
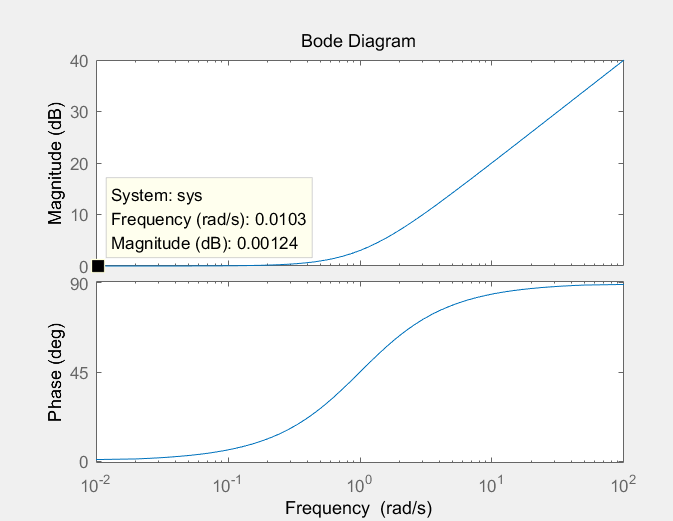
可以看到当频率w在截止频率附近时,变化非常大,从小于截止频率时的接近于0,
再到根号2分之1,直到十倍、百倍。
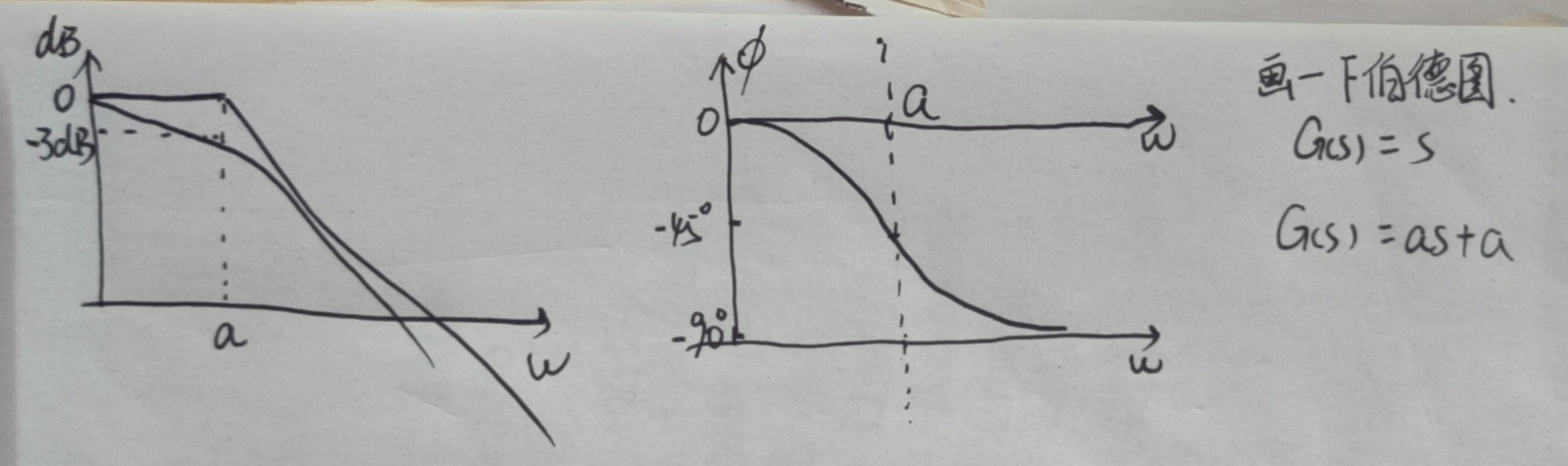
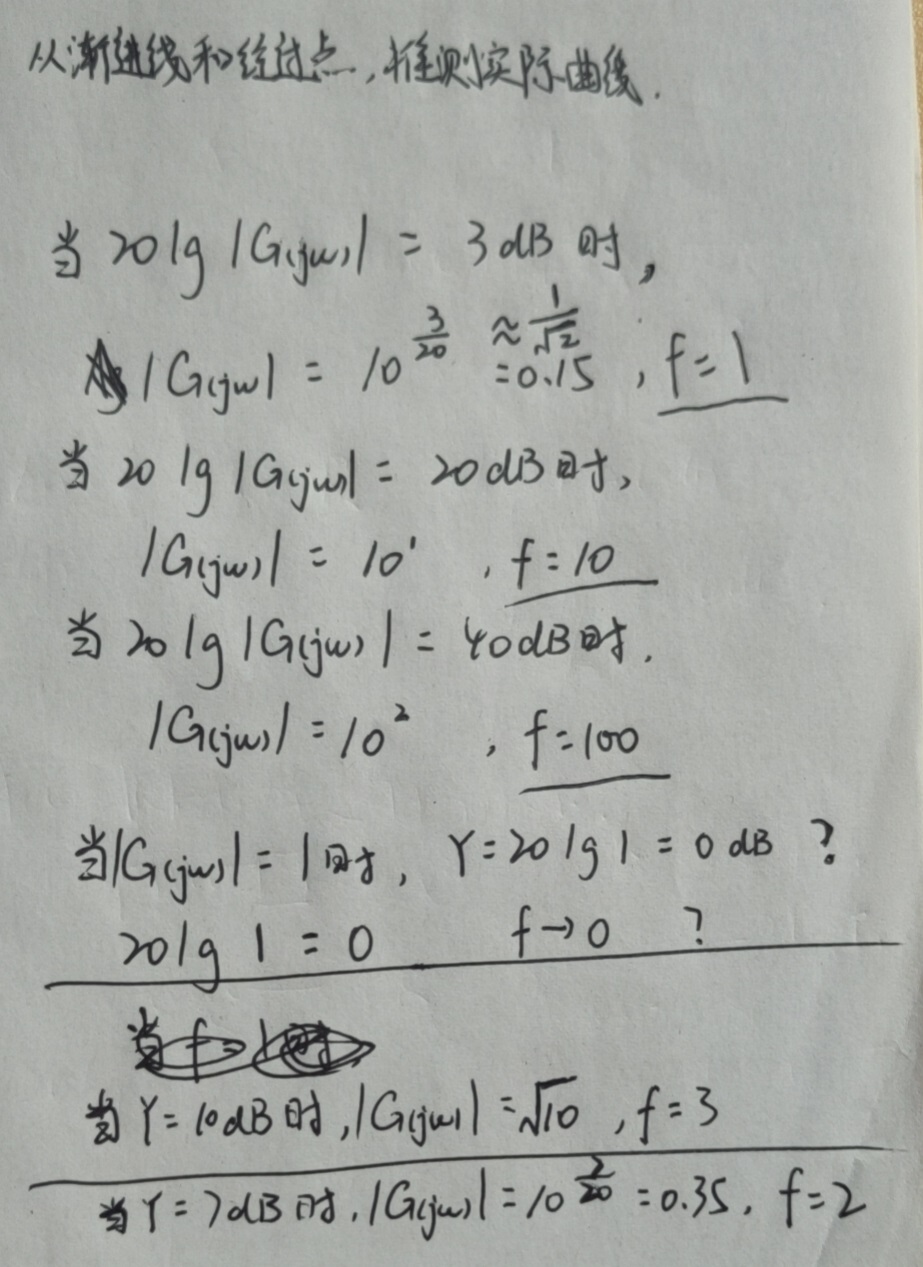
16. 伯德图手绘技巧与应用
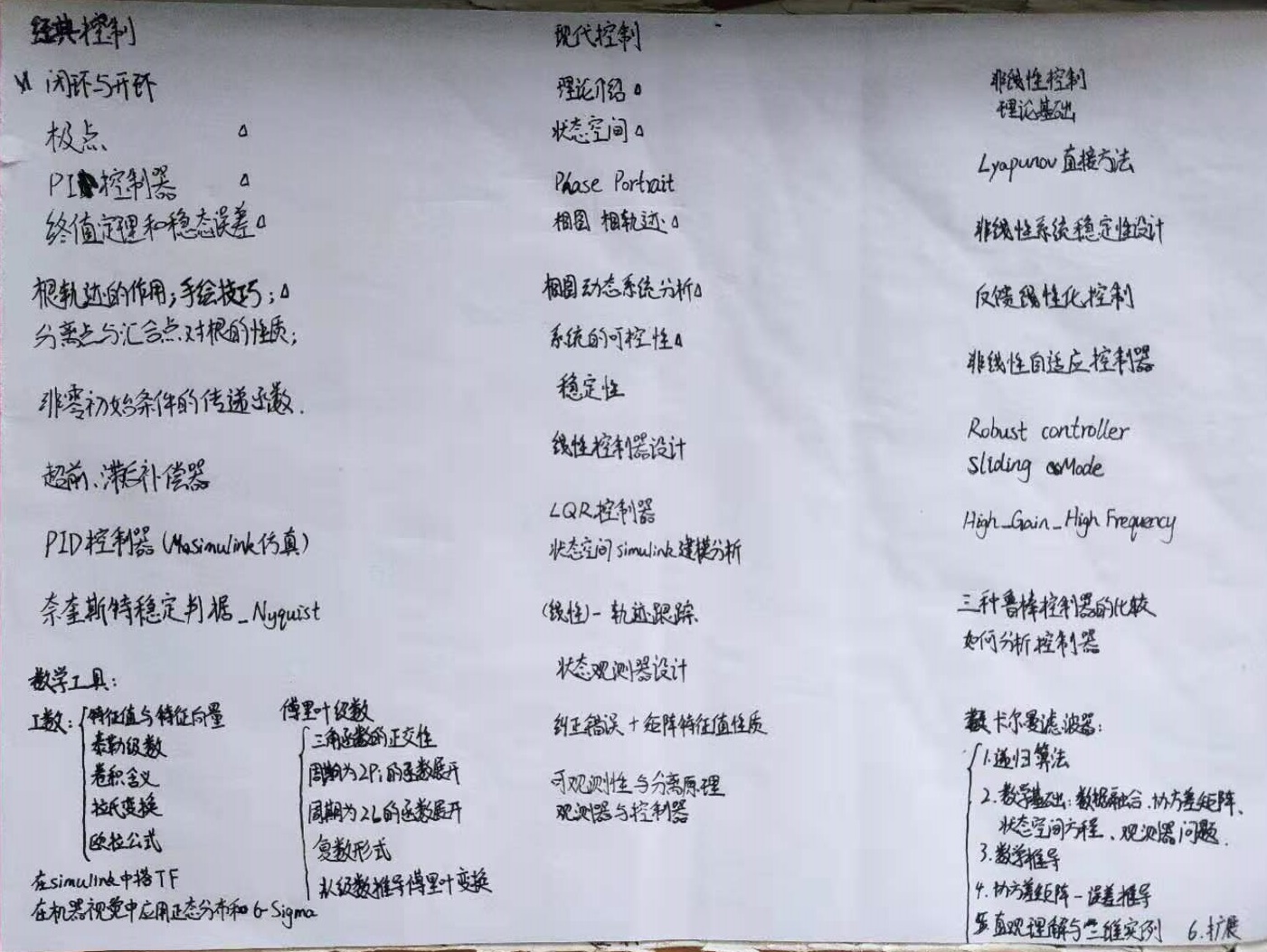
自动控制原理学习内容预览:

 浙公网安备 33010602011771号
浙公网安备 33010602011771号