
FPGA实现人脸检测
之前的博客都是基本的图像处理,本篇博客整理一下用 FPGA 实现人脸检测的方法,工程比较有趣。
一、肤色提取
首先我们需要把肤色从外界环境提取出来,在肤色识别算法中,常用的颜色空间为YCbCr,Y 代表亮度,Cb 代表蓝色分量,Cr 代表红色分量。肤色在 YCbCr 空间受亮度信息的影响较小,本算法直接考虑 YCbCr 空间的CbCr 分量,映射为两维独立分布的 CbCr 空间。在 CbCr 空间下,肤色类聚性好,利用人工阈值法将肤色与非肤色区域分开,形成二值图像。
RGB 转 YCbCr的实现参照之前博客《FPGA实现图像灰度转换(2):RGB转YCbCr转Gray》。
根据经验,对肤色进行提取的条件场用如下不等式:
77 < Cb < 127,133 < Cr < 173.
代码基于 RGB_YCbCr_Gray,在最后本该输出灰度数据时,修改为输出肤色数据:

always @(posedge clk or negedge rst_n) begin if(!rst_n) begin face_data <= 'h0; end else if( (Cb2 > 77) && (Cb2 < 127) && (Cr2 > 133) && (Cr2 < 173) ) begin face_data <= 16'hffff; end else begin face_data <= 'h0; end end
用一副图片试试,原图如下所示:

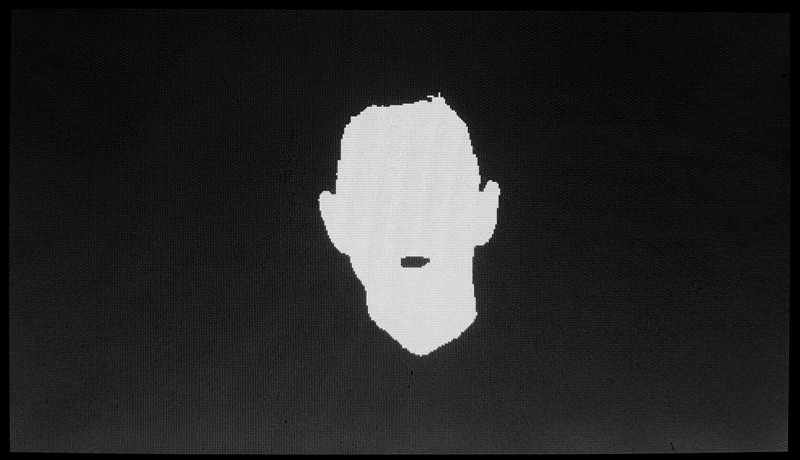
肤色提取后结果如下所示:
二、滤波处理
图片还好,如果是摄像头数据会有很多噪声,针对噪声,我们可以用之前整理过的中值滤波、高斯滤波等处理。
此外人脸内部还会有些黑点,包括人脸外的环境可能有些地方也会被误检测为人脸,造成实验失败,因此可以加入形态学处理:腐蚀、膨胀、开运算、闭运算等,这些之前都整理过,不展开说了。
三、人脸框选
现在我们要用一个框将人脸框住,达到人脸检测的目的。
//========================================================================== //== 行列划分 //========================================================================== always @(posedge clk or negedge rst_n) begin if(!rst_n) x <= 10'd0; else if(add_x) begin if(end_x) x <= 10'd0; else x <= x + 10'd1; end end assign add_x = face_de; assign end_x = add_x && x== COL-10'd1; always @(posedge clk or negedge rst_n) begin if(!rst_n) y <= 10'd0; else if(add_y) begin if(end_y) y <= 10'd0; else y <= y + 10'd1; end end assign add_y = end_x; assign end_y = add_y && y== ROW-10'd1; //========================================================================== //== 前一帧:人脸框选 //========================================================================== always @(posedge clk or negedge rst_n) begin if(!rst_n) begin x_min <= COL; end else if(pos_vsync) begin x_min <= COL; end else if(face_data==16'hffff && x_min > x) begin x_min <= x; end end //--------------------------------------------------- always @(posedge clk or negedge rst_n) begin if(!rst_n) begin x_max <= 0; end else if(pos_vsync) begin x_max <= 0; end else if(face_data==16'hffff && x_max < x) begin x_max <= x; end end //--------------------------------------------------- always @(posedge clk or negedge rst_n) begin if(!rst_n) begin y_min <= ROW; end else if(pos_vsync) begin y_min <= ROW; end else if(face_data==16'hffff && y_min > y) begin y_min <= y; end end //--------------------------------------------------- always @(posedge clk or negedge rst_n) begin if(!rst_n) begin y_max <= 0; end else if(pos_vsync) begin y_max <= 0; end else if(face_data==16'hffff && y_max < y) begin y_max <= y; end end //========================================================================== //== 前一帧结束:保存坐标值 //========================================================================== always @(posedge clk or negedge rst_n) begin if(!rst_n) begin x_min_r <= 0; x_max_r <= 0; y_min_r <= 0; y_max_r <= 0; end else if(neg_vsync) begin x_min_r <= x_min; x_max_r <= x_max; y_min_r <= y_min; y_max_r <= y_max; end end //========================================================================== //== 当前帧:数据输出 //========================================================================== always @(posedge clk or negedge rst_n) begin if(!rst_n) begin TFT_data <= 16'b0; end else if(TFT_y == y_min_r && TFT_x >= x_min_r && TFT_x <= x_max_r) begin TFT_data <= 16'b00000_111111_00000; end else if(TFT_y == y_max_r && TFT_x >= x_min_r && TFT_x <= x_max_r) begin TFT_data <= 16'b00000_111111_00000; end else if(TFT_x == x_min_r && TFT_y >= y_min_r && TFT_y <= y_max_r) begin TFT_data <= 16'b00000_111111_00000; end else if(TFT_x == x_max_r && TFT_y >= y_min_r && TFT_y <= y_max_r) begin TFT_data <= 16'b00000_111111_00000; end else begin TFT_data <= RGB_data; end end
x 和 y为图像的实时坐标值,TFT_x 和 TFT_y 为 TFT_driver 生成的坐标值,这两个是不一样的。如果二者一样,最后的图像会有偏移。框的四个顶点坐标代码挺有意思,一开始很难理解,带几个数去看看就明白了,这段代码挺巧妙的,也挺简洁的。总体的思想和直方图拉伸很像,分两帧来处理,第一帧得到顶点坐标,当前帧的输出则实时的使用这个顶点坐标,因为两帧图像的差别很小,所以这么做比较方便。
要注意的是每次扫描一帧后,顶点坐标要变回初始值,否则会出错,这点在图片的处理上体会不到什么,感觉不出bug,但是移植到摄像头视频数据时,不变回初始值就会有问题。这里的时序挺有意思,一开始我以为要打拍什么的,后面发现其实得到的是一个坐标值,坐标值本身在一帧结束到下一帧结束这段时间里是固定的,没必要打拍,但是要寄存住,和直方图拉伸一样。
最终输出的结果是一个绿色的矩形框,非矩形框区域则输出原始视频数据,效果如下所示:
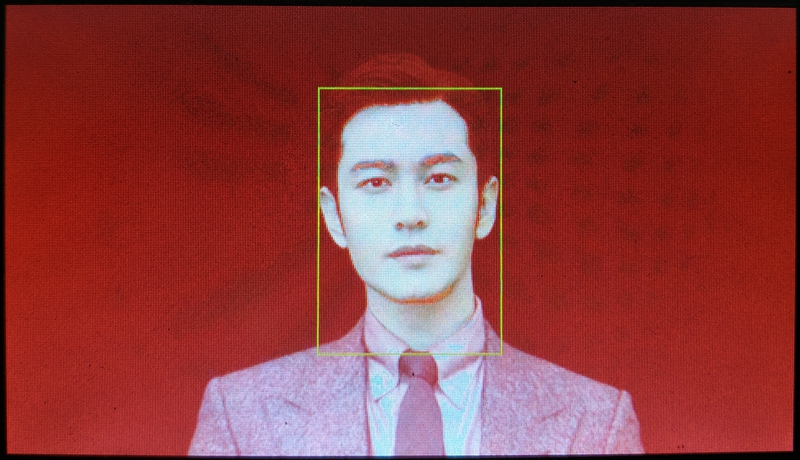
板卡坏了哈,本来颜色很好的。
四、基于 OV7670 的人脸检测工程
算法方面直接移植即可,注意的是,OV7670摄像头很差劲,噪声很多,需要进行一定的滤波处理,否则效果很差劲。
我一开始直接移植写好的图像版本的主要代码,结果基本没有效果,以为是程序出错,检查了半天没找到毛病。后面将显示改成“框+二值图”,终于发现了屏幕上全是椒盐噪声,难怪没法成功,而如果用 OV7725 或 OV5640 等摄像头,这样的问题应该没这么严重。设备不给力,算法来使劲,我在肤色提取后连续进行了三次中值滤波去噪,然后用了一次腐蚀算法,最终的效果才勉强成功。
视频演示如下所示,不想上镜,人脸改成手来测试:
由于摄像头太差,加上板卡出现问题,颜色失真,导致看起来不漂亮,但总的结果还是对的。
五、基于OV7725的人脸检测工程
回学校修好了板卡,换了 OV7725 摄像头,效果好多了。
参考资料:
[1]OpenS Lee:FPGA开源工作室(公众号)
[2]NingHechuan:硅农(公众号)



【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步