Jetson Xavier上编译autoware1.14.0,简单,快速,完美安装!
(最近发现目前网上的教程感觉都只是翻译了一下autoware官方的教程,其实很多问题并没有解决,甚至怀疑有没有真的配置上,所以和师兄进行了讨论和尝试,成功发现了一套特别简单的流程,完成在xavier上autoware源码的编译)
记录下最近和舵敏智能科技的师兄一起在xaiver上配置autoware 1.14.0的情况
之前也尝试过在ubuntu 18.04 和 xavier上配置autoware过,可是都由于opencv,cv_bridge版本问题,很难解决,最终都是回归了16.04的系统完成的配置
这两天由于必须要在xavier上配置autoware,所以再次进行了尝试
我的jetson xavier 的jetpack版本是4.3 CUDA10.0的版本,但是这个影响应该不大
先在xavier上安装好ros melodic的desktop-full版本
之后如果这个时候直接按照autoware的官方介绍进行安装(https://github.com/Autoware-AI/autoware.ai/wiki/Source-Build),会有一堆opencv的错误
查了之后,应该需要opencv3.2.0版本,而sudo apt-get install libopencv-dev发现是4.0的版本,这个时候重点来了,师兄有个重大发现可以直接更换opencv版本,具体步骤如下:
1、卸载现有版本的opencv
sudo apt-get purge libopencv-dev
2、这个时候需要修改一个系统文件,就是这个文件导致apt安装的opencv版本是4.0版本而不是ubuntu18.04系统默认的3.2.0版本
文件路径是:/etc/apt/sources.list.d/nvidia-l4t-apt-source.list

打开之后注释掉里面的两行

然后 apt update
最后sudo apt-get install libopencv-dev,就可以成功安装opencv3.2.0版本了
(这里师兄发现是nvidia导致opencv版本出问题,不得不直呼好家伙,这都能发现)
3、接下来就按照autoware官方指导进行安装即可,链接如下:
https://github.com/Autoware-AI/autoware.ai/wiki/Source-Build
这里需要注意几个事情:
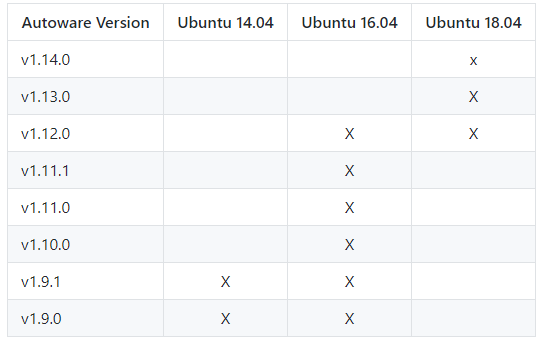
1、版本对应问题,下图中打×的才是可以适配的版本,我一开始就理解错了/(ㄒoㄒ)/~~
2、ubuntu18.04需要eigen3.3.7以上的版本,需要重新安装,这里需要先把以前的eigen全部删除干净再进行安装,稍微有点小折腾
如果走到了这一步,恭喜,等待autoware慢慢编译,就可以成功啦!
(ps:下面贴一个师兄公司的二维码,如果帖子有用,大家可以关注一下,有什么问题请留言,我会尽量帮助解决)


 浙公网安备 33010602011771号
浙公网安备 33010602011771号