论文笔记-EfficientDet
paper: EfficientDet: Scalable and Efficient Object Detection
code
Abstract
-
谷歌大脑团队提出的新的目标检测算法,性能极佳,EfficientDet-D0的mAP就超过了yolov3,EfficientDet-D6更是达到了50.9,且参数量更少。(D-X,其中X代表文中提到的scale factor)
-
EfficientDet的关键部分在于EfficientNet、BiFPN、Compound scaling method
- 借鉴Efficient,将其作为网络的backbone
- 对于特征融合,提出BiFPN的特征融合方式,在融合top-down和bottom-up的特征时,为不同的层分配不同的权重,并给出了fast normalized fusion的方式
- 为了保持accuracy和efficiency之间的trade-off,引入compound scaling method,即引入一个因子,该因子会backbone的结构、BiFPN的结构以及最后的class/bbox子网络结构的维度统一进行调整,具体的实现方式则是给定候选的多个因子值,然后利用grid search,选取其中效果最优的。
-
下文分析将主要集中在BiFPN上,EfficientNet参见另外的EfficientNet介绍
Details
-
BiFPN结构
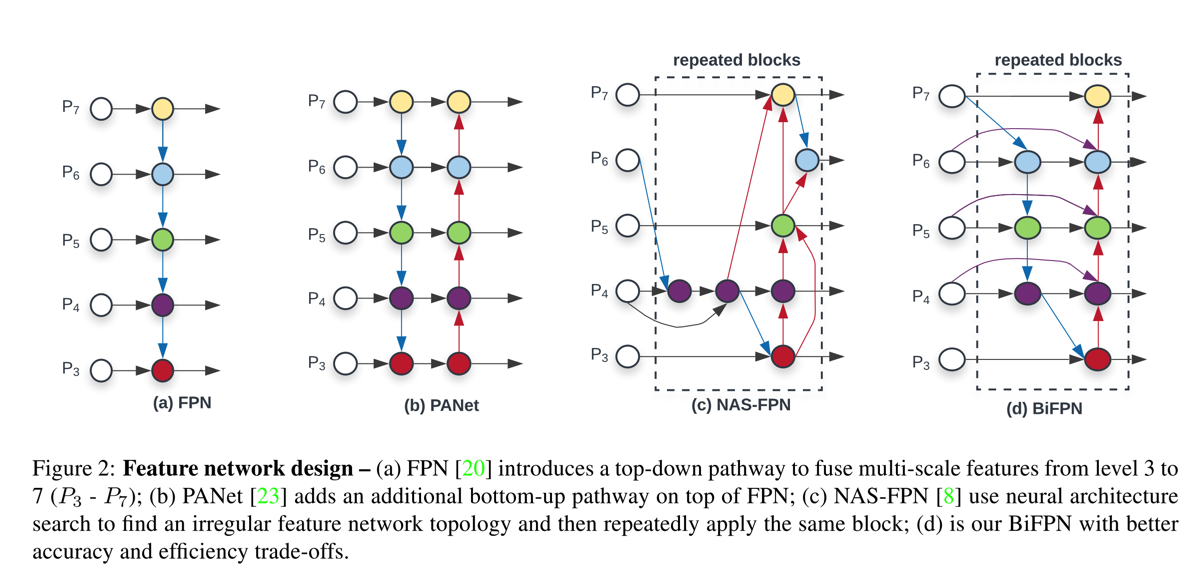
- 在RetinaNet中,网络结合FPN,将top-down和bottom-up的特征融合起来,其融合的方式是(以层P2为例),在bottom-up中有P2_bottom,在top-down中,有P2的上一层特征P3_up,然后将P3_up进行upsample使其维度和P2_bottom保持一致(可以用stride conv实现),同时对P2_bottom的channel进行降维(横向连接),使其channel和P3_up后的输出channel保持一致,然后进行element-wise的addition
- 相较于FPN的方式,BiFPN则是增加了双向选择的方式,如下图:
![]()
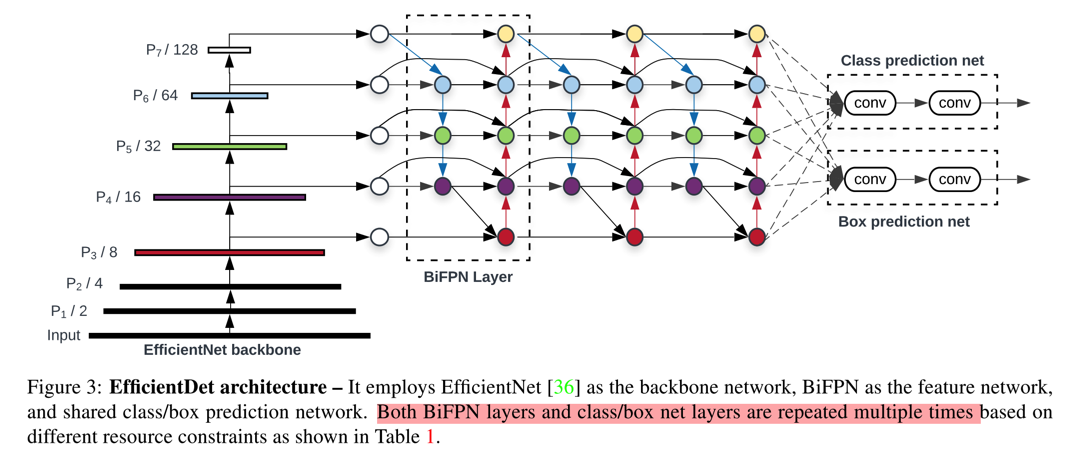
- 即,对于P6层最终的输出特征,有三部分构成:最原始的P6层特征(通过1x1的conv),P6层(1x1的conv)和P7层upsample后的特征融合的特征,P5层的最终的输出的特征(downsample),这里用的conv和padding都是same padding的方式,参考PyTorch中的代码实现如下
p6_w1 = self.p6_w1_relu(self.p6_w1) weight = p6_w1 / (torch.sum(p6_w1, dim=0) + self.epsilon) # Connections for P6_0 and P7_0 to P6_1 respectively p6_up = self.conv6_up(self.swish(weight[0] * p6_in + weight[1] * self.p6_upsample(p7_in))) # Weights for P6_0, P6_1 and P5_2 to P6_2 p6_w2 = self.p6_w2_relu(self.p6_w2) weight = p6_w2 / (torch.sum(p6_w2, dim=0) + self.epsilon) # Connections for P6_0, P6_1 and P5_2 to P6_2 respectively p6_out = self.conv6_down( self.swish(weight[0] * p6_in + weight[1] * p6_up + weight[2] * self.p6_downsample(p5_out))) - 用于特征融合的conv,如上面的
conv6_up均是采用depthwise conv实现的
-
fusion的实现方式
- 作者在文中给出了三种融合方式的介绍,这里只介绍最快速有效的fast normalized fusion的方式,公式如下:
\[ O = \sum_{i} \frac{e^{w_i}}{\epsilon + \sum_{j} {w_j}} \] - 这个里面没有任何的softmax操作,相对更快速,如上面的代码所示
- 其中的swish激活函数是\( f = x \times sigmoid(x) \)
- 作者在文中给出了三种融合方式的介绍,这里只介绍最快速有效的fast normalized fusion的方式,公式如下:
-
class/bbox子网络
- class和bbox的分类子网络和RetinaNet中的一样,分别是几个连续的conv操作(depthwise conv)最后分别输出对应的类别信息和bbox信息
- 最终的网络结构图:
Conclusion
- 对于detection任务,特征融合对效果的提升应该是比较明显的,尤其是对小目标的检测,这是最简单粗暴的方式(其他还有,扩大输入图像的分辨率,数据增强,小目标的oversampling等)
- 在算力资源的限制没有那么大后,现在NAS的应用范围越来越广了,也确实有效。RegNet甚至都已经开始对搜索空间下手了,值得了解一下。但在嵌入式设备上,还是比较受限制的。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号