机器学习十讲第四讲
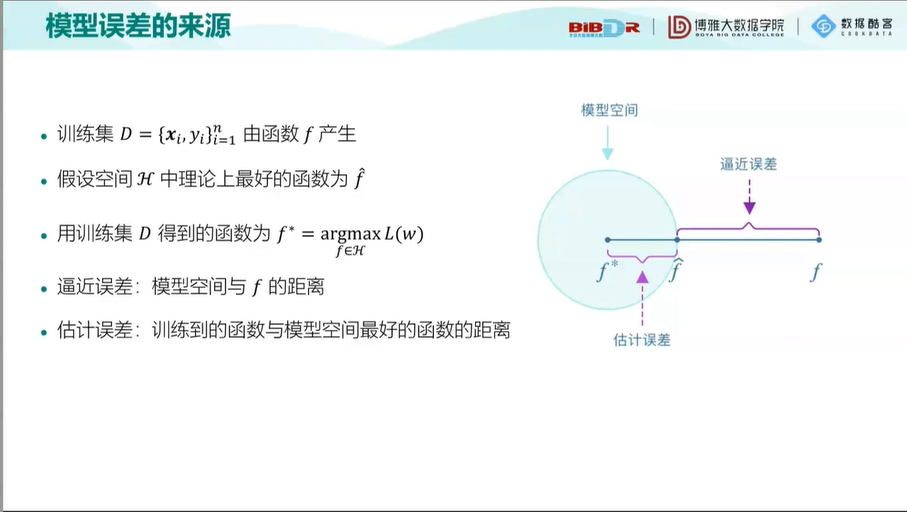
模型误差的来源
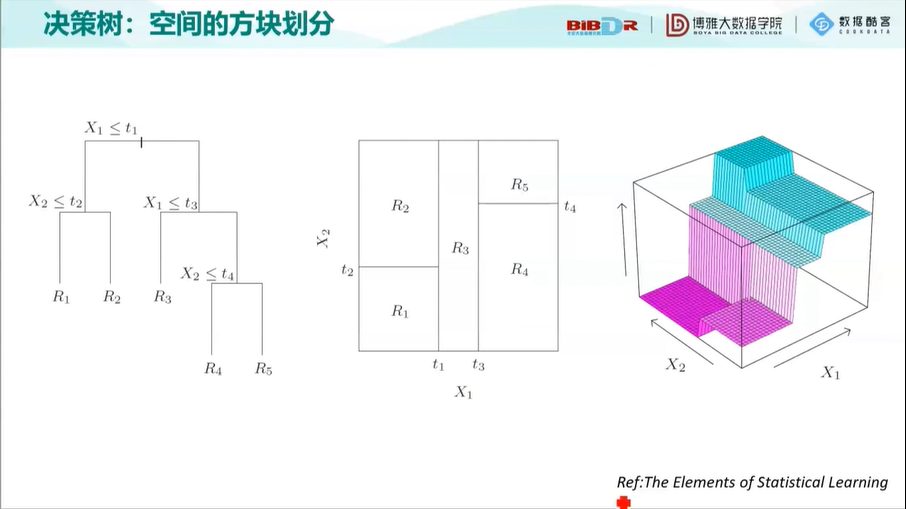
决策树:空间的方块划分
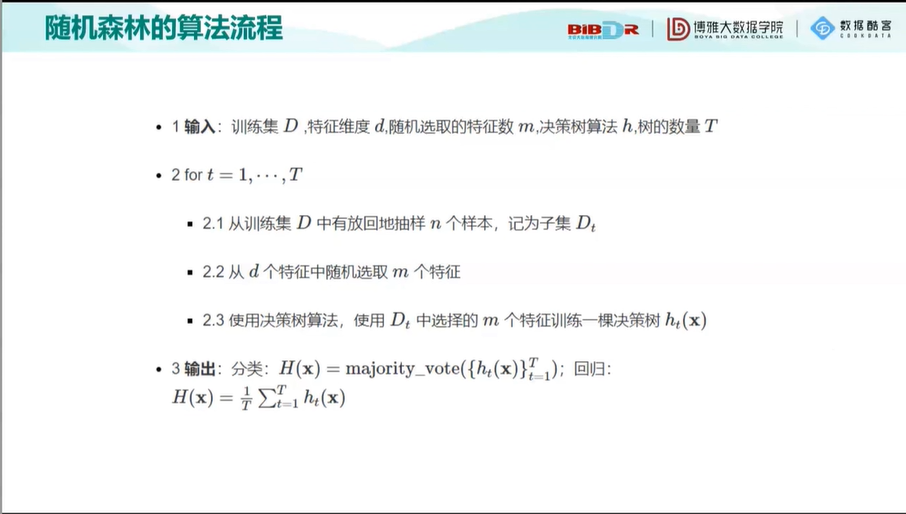
随机森林:独立思考的重要性

决策树、随机森林和 AdaBoost 的 Python 实现
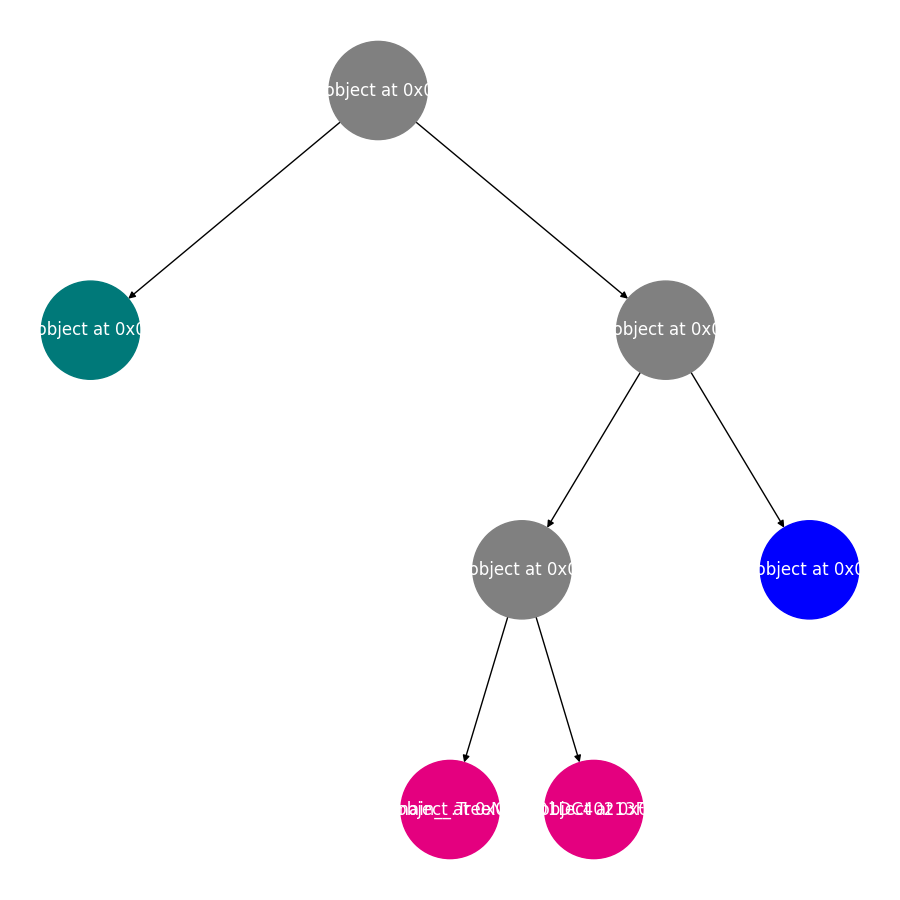
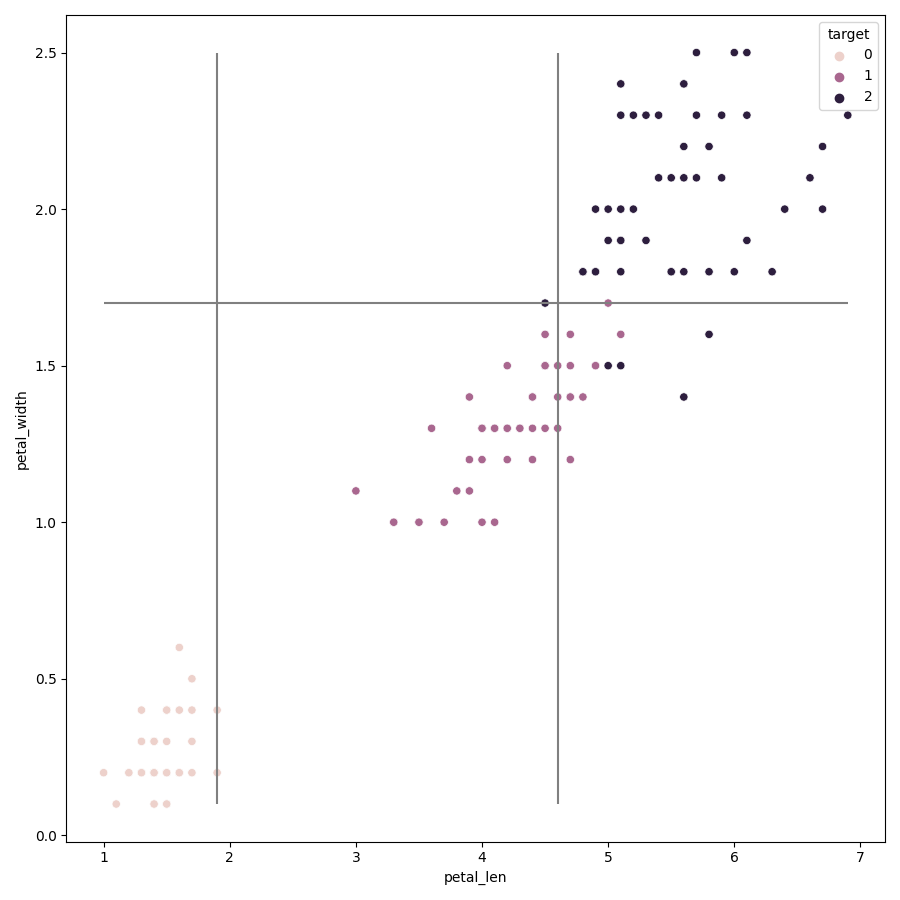
from sklearn.datasets import load_iris import pandas as pd import numpy as np iris = load_iris() iris_df = pd.DataFrame(data=iris.data,columns=iris.feature_names) iris_df["target"] = iris.target iris_df.head() iris_df.columns = ["sepal_len","sepal_width","petal_len","petal_width","target"] X_iris = iris_df.iloc[:,:-1] y_iris = iris_df["target"] #定义决策树节点 class TreeNode: def __init__(self, x_pos, y_pos, layer, class_labels=[0, 1, 2]): self.f = None # 当前节点的切分特征 self.v = None # 当前节点的切分点 self.left = None # 左儿子节点 self.right = None # 右儿子节点 self.pos = (x_pos, y_pos) # 节点坐标,可视化用 self.label_dist = None # 当前节点样本的类分布 self.layer = layer self.class_labels = class_labels def __str__(self): # 打印节点信息,可视化时的节点标签 if self.f != None: return self.f + "\n<=" + str(round(self.v, 2)) else: return str(self.label_dist) + "\n(" + str(np.sum(self.label_dist)) + ")" #基尼系数计算 def gini(y): return 1 - np.square(y.value_counts()/len(y)).sum() #分类决策树生成 def generate(X,y,x_pos,y_pos,nodes,min_leaf_samples,max_depth,layer,class_labels): current_node = TreeNode(x_pos,y_pos,layer,class_labels)#创建节点对象 current_node.label_dist = [len(y[y==v]) for v in class_labels] #当前节点类样本分布 nodes.append(current_node) if(len(X) < min_leaf_samples or gini(y) < 0.1 or layer > max_depth): #判断是否需要生成子节点 return current_node max_gini,best_f,best_v = 0,None,None for f in X.columns: #特征遍历 for v in X[f].unique(): #取值遍历 y1,y2 = y[X[f] <= v],y[X[f] > v] if (len(y1) >= min_leaf_samples and len(y2) >= min_leaf_samples): imp_descent = gini(y) - gini(y1)*len(y1)/len(y) - gini(y2)*len(y2)/len(y) # 计算不纯度变化 if imp_descent > max_gini: max_gini,best_f,best_v = imp_descent,f,v current_node.f,current_node.v = best_f,best_v if(current_node.f != None): current_node.left = generate(X[X[best_f] <= best_v],y[X[best_f] <= best_v],x_pos-(2**(max_depth-layer)),y_pos -1,nodes,min_leaf_samples,max_depth,layer + 1,class_labels) current_node.right = generate(X[X[best_f] > best_v],y[X[best_f] > best_v],x_pos+ (2**(max_depth-layer)),y_pos -1,nodes,min_leaf_samples,max_depth,layer + 1,class_labels) return current_node #输入为训练数据,叶子节点最小样本数和树的最大深度。返回树的根,节点集合。 def decision_tree_classifier(X,y,min_leaf_samples,max_depth): nodes = [] root = generate(X,y,0,0,nodes,min_leaf_samples=min_leaf_samples,max_depth=max_depth,layer=1,class_labels=y.unique()) return root,nodes #使用 Networkx 将决策树可视化 def get_networkx_graph(G, root): if root.left != None: G.add_edge(root, root.left) #在当前节点和左儿子节点之间建立一条边,加入G get_networkx_graph(G, root.left) #对左儿子执行同样操作 if root.right != None: G.add_edge(root, root.right) #在当前节点和左儿子节点之间建立一条边,加入G get_networkx_graph(G,root.right)#对右儿子执行同样操作 def get_tree_pos(G): pos = {} for node in G.nodes: pos[node] = node.pos return pos def get_node_color(G): color_dict = [] for node in G.nodes: if node.f == None: #叶子节点 label = np.argmax(node.label_dist) if label%3 == 0: color_dict.append("#007979") #深绿色 elif label%3 == 1: color_dict.append("#E4007F") #洋红色 else: color_dict.append("blue") else: color_dict.append("gray") return color_dict import matplotlib.pyplot as plt import networkx as nx #1训练决策树 root,nodes = decision_tree_classifier(X_iris,y_iris,min_leaf_samples=10,max_depth=4) #2将决策树进行可视化 fig, ax = plt.subplots(figsize=(9, 9)) #2.1将图的大小设置为 9×9 graph = nx.DiGraph() #2.2 创建 Networkx 中的网络对象 get_networkx_graph(graph, root) # 2.3 将决策树转换成 Networkx 的网络对象 pos = get_tree_pos(graph) #2.4 获取节点的坐标 # 2.5 绘制决策树 nx.draw_networkx(graph,pos = pos,ax = ax,node_shape="o",font_color="w",node_size=5000,node_color=get_node_color(graph)) plt.box(False) #去掉边框 plt.axis("off")#不显示坐标轴 plt.show() #决策树的决策边界 import seaborn as sns #筛选两列特征 feature_names = ["petal_len","petal_width"] X = iris_df[feature_names] y = iris_df["target"] #训练决策树模型 tree_two_dimension, nodes = decision_tree_classifier(X,y,min_leaf_samples=10,max_depth=4) #开始绘制决策边界 fig, ax = plt.subplots(figsize=(9, 9)) #设置图片大小 sns.scatterplot(x = X.iloc[:,0], y = X.iloc[:,1],ax = ax,hue = y) #绘制样本点 #遍历决策树节点,绘制划分直线 for node in nodes: if node.f == X.columns[0]: ax.vlines(node.v,X.iloc[:,1].min(),X.iloc[:,1].max(),color="gray") # 如果节点分裂特征是 petal_len ,则绘制竖线 elif node.f == X.columns[1]: ax.hlines(node.v,X.iloc[:,0].min(),X.iloc[:,0].max(),color="gray") #如果节点分裂特征是 petal_width ,则绘制水平线 #开始绘制决策边界 fig, ax = plt.subplots(figsize=(9, 9)) #设置图片大小 sns.scatterplot(x = X.iloc[:,0], y = X.iloc[:,1],ax = ax,hue = y) #绘制样本点 #遍历决策树节点,绘制划分直线 for node in nodes: if node.f == X.columns[0]: ax.vlines(node.v,X.iloc[:,1].min(),X.iloc[:,1].max(),color="gray") # 如果节点分裂特征是 petal_len ,则绘制竖线 elif node.f == X.columns[1]: ax.hlines(node.v,X.iloc[:,0].min(),X.iloc[:,0].max(),color="gray") #如果节点分裂特征是 petal_width ,则绘制水平线 def plot_tree_boundary(X, y, tree, nodes): # 优化计算每个决策线段的起始点 for node in nodes: node.x0_min, node.x0_max, node.x1_min, node.x1_max = X.iloc[:, 0].min(), X.iloc[:, 0].max(), X.iloc[:,1].min(), X.iloc[:,1].max(), node_list = [] node_list.append(tree) while (len(node_list) > 0): node = node_list.pop() if node.f != None: node_list.append(node.left) node_list.append(node.right) if node.f == X.columns[0]: node.left.x0_max = node.v node.right.x0_min = node.v elif node.f == X.columns[1]: node.left.x1_max = node.v node.right.x1_min = node.v fig, ax = plt.subplots(figsize=(9, 9)) # 设置图片大小 sns.scatterplot(x=X.iloc[:, 0], y=X.iloc[:, 1], ax=ax, hue=y) # 绘制样本点 # 遍历决策树节点,绘制划分直线 for node in nodes: if node.f == X.columns[0]: ax.vlines(node.v, node.x1_min, node.x1_max, color="gray") # 如果是节点分裂特征是 petal_len ,则绘制竖线 elif node.f == X.columns[1]: ax.hlines(node.v, node.x0_min, node.x0_max, color="gray") # 如果是节点分裂特征是 petal_width ,则绘制水平线 # 绘制边框 ax.vlines(X.iloc[:, 0].min(), X.iloc[:, 1].min(), X.iloc[:, 1].max(), color="gray") ax.vlines(X.iloc[:, 0].max(), X.iloc[:, 1].min(), X.iloc[:, 1].max(), color="gray") ax.hlines(X.iloc[:, 1].min(), X.iloc[:, 0].min(), X.iloc[:, 0].max(), color="gray") ax.hlines(X.iloc[:, 1].max(), X.iloc[:, 0].min(), X.iloc[:, 0].max(), color="gray") plt.show() plot_tree_boundary(X,y,tree_two_dimension,nodes)