
一、直线和圆拟合概述
直线和圆的拟合,是视觉项目中非常常见的需求,但是对新手来说,在Halcon中实现却比较困难。
其基本思路都是:
① 分割出边缘,得到XLD(gen_contours_skeleton_xld、edges_sub_pix等)
② 将XLD进行分割、筛选(segment_contours_xld、select_contours_xld)
③ 将XLD进行拟合(fit_line_contour_xld、fit_circle_contour_xld等)
直线的拟合参考:https://www.cnblogs.com/xh6300/p/9782132.html
虽然思路比较固定,但是算子组合、调参还是需要相当的技巧,并且很多时候效果都不尽如人意。
如果有用过康耐视的VisionPro的话,你会发现里面的抓圆、抓边操作非常简单。只需要用卡尺去拟合,然后简单设置参数即可。
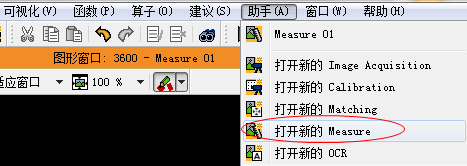
二、Halcon测量助手
实际上,Halcon是非常强大的,只是有时候没有那么方便而已。但是已经有大神封装了抓圆和抓边的工具函数。其基本原理主要参考Halcon自带的“测量助手”:
它涉及的主要算子如下,大家有时间可以自己研究一下:
gen_measure_rectangle2、gen_measure_arc(gen_measure_arc.hdev)
measure_pos :得到测量区域内边缘处的交点坐标,以及交点之间的直线距离或弧线距离。
measure_pairs:与measure_pos类似
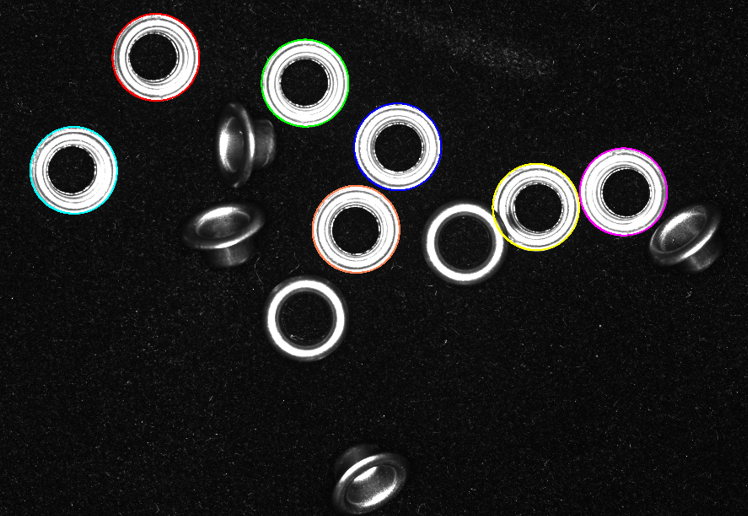
三、卡尺工具(rake、spoke)
rake和spoke工具函数就是大神封装的抓边和抓圆工具。下载链接:
https://files-cdn.cnblogs.com/files/xh6300/find_line_find_circle.zip
解压以后将文件夹放在下面的路径下即可(根据Halcon安装路径不同而有所不同):
C:\Program Files\MVTec\HALCON-12.0\procedures
该卡尺工具执行过程为:
① 确定边缘检测方向
② 高斯滤波
③ 执行投影处理
④ 执行微分处理
⑤ 设置边缘敏感度、边缘极性、边缘的位置
⑥ 边缘执行亚像素处理
四、拟合时不同算法参数的说明
1、fit_line_contour_xld
对于参数Algorithm中的一些类型解释如下:
regression:回归,标准的最小二乘法拟合
huber:加权的最小二乘法拟合,异常值的影响被减小基于Huber方法(越远权值越低)
tukey:加权的最小二乘法拟合,异常值的影响被减小基于Tukey方法(异常值直接抛掉)
drop:加权的最小二乘法拟合,异常值的影响被消除
gauss:加权的最小二乘法拟合,异常值的影响被减小基于最逼近线上的所有其轮廓点的平均值和距离标准方差
参考:http://blog.sina.com.cn/s/blog_d38f8be50102wbtp.html
2、fit_circle_contour_xld
参数Algorithm的可选项解释如下:
algebraic:这种方法减少了轮廓点与结果圆之间的代数距离
ahuber:类似于algebraic,轮廓点被加权以减小异常值的影响基于方法Huber
atukey:类似于algebraic,轮廓点被加权以减小异常值的影响基于方法Tukey
geometric:该法减少了轮廓点与结果圆之间的几何距离,该法被统计是最优的,但占用很多计算时间。如果轮廓点被噪声干扰严重,可以考虑使用该方法。
geohuber:类似于geometric,轮廓点被加权以减小异常值的影响基于方法Huber
geotukey:类似于geometric,轮廓点被加权以减小异常值的影响基于方法Tukey
参考:http://blog.sina.com.cn/s/blog_d38f8be50102wbud.html
--------------------------------------------
本文系原创,转载请注明出处。
如果文章对您有帮助,可以点击下方的【好文要顶】或【关注我】;如果您想进一步表示感谢,可通过网页右侧的【打赏】功能进行打赏。
感谢您的支持,我会继续写出更多的相关文章!文章有不理解的地方欢迎跟帖交流,博主经常在线!^_^

 浙公网安备 33010602011771号
浙公网安备 33010602011771号