
一、阈值分割
阈值分割算子众多:
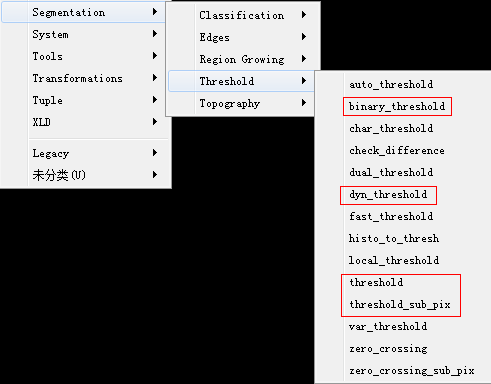
threshold :这是最基本最简单的阈值算子。
binary_threshold :它是自动阈值算子,自动选出暗(dark)的区域,或者自动选出亮(light)的区域,理解起来并没有难度。
dyn_threshold :该算子和dual_threshold和var_threshold的理解参考下文链接。
Halcon阈值化算子dual_threshold和var_threshold的理解
动态阈值需要一张模糊的图片做对比,因此需要预处理图像的算子。
预处理算子:
mean_image、binomial_filter:对图像的一般预处理,用于消除噪声。
median_image:抑制小斑点或者细线。
smooth_image:平滑图像。
anisotropic_diffusion:平滑图像的同时保留边缘。
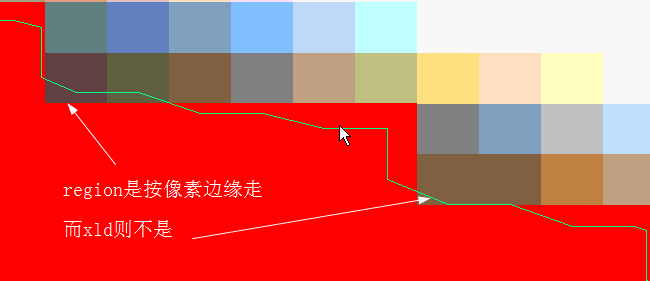
threshold_sub_pix :通过阈值分割,从图像中提取具有亚像素精度的灰度边缘。它不返回区域,而是将灰度值小于阈值的区域与灰度值大于阈值的区域分隔开。(XLD)
有个跟它非常类似的算子——edges_sub_pix。
二、XLD拼接
XLD合并操作:
union_collinear_contours_xld:合并在同一直线的XLD
union_cocircular_contours_xld:合并在同圆的XLD
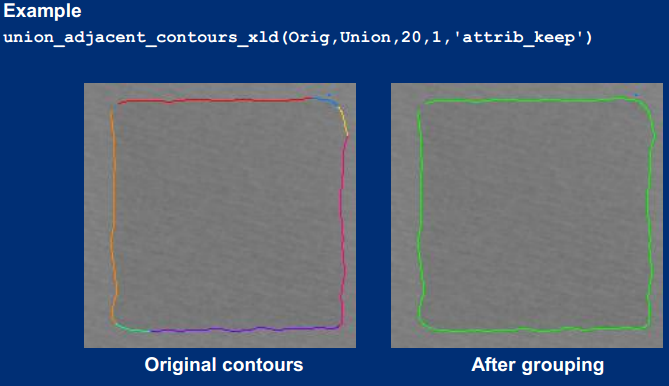
union_adjacent_contours_xld:合并邻近的XLD
以union_adjacent_contours_xld为例,用图例说明一下XLD合并算子的原理。

--------------------------------------------
本文系原创,转载请注明出处。
如果文章对您有帮助,可以点击下方的【好文要顶】或【关注我】;如果您想进一步表示感谢,可通过网页右侧的【打赏】功能进行打赏。
感谢您的支持,我会继续写出更多的相关文章!文章有不理解的地方欢迎跟帖交流,博主经常在线!^_^

 浙公网安备 33010602011771号
浙公网安备 33010602011771号