

高维数据的高速近期邻算法FLANN
高维数据的高速近期邻算法FLANN
1. 简单介绍
在计算机视觉和机器学习中,对于一个高维特征,找到训练数据中的近期邻计算代价是昂贵的。对于高维特征,眼下来说最有效的方法是 the randomized k-d forest和the priority search k-means tree,而对于二值特征的匹配 multiple hierarchical clusteringtrees则比LSH方法更加有效。
眼下来说。fast library for approximate nearest neighbors (FLANN)库能够较好地解决这些问题。
2. 高速近似NN匹配(FAST APPROXIMATE NN MATCHING)
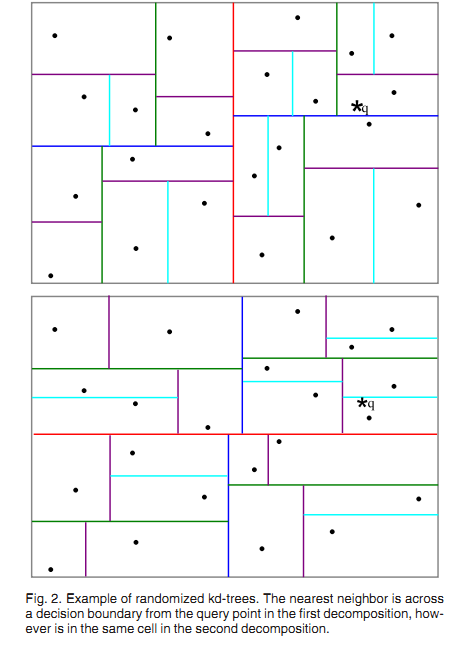
2.1 随机k-d树算法(The Randomized k-d TreeAlgorithm)
a. Classick-d tree
找出数据集中方差最高的维度,利用这个维度的数值将数据划分为两个部分,对每一个子集反复同样的过程。
參考http://www.cnblogs.com/eyeszjwang/articles/2429382.html。
b. Randomizedk-d tree
建立多棵随机k-d树。从具有最高方差的N_d维中随机选取若干维度,用来做划分。在对随机k-d森林进行搜索时候。全部的随机k-d树将共享一个优先队列。
添加树的数量能加快搜索速度。但因为内存负载的问题。树的数量仅仅能控制在一定范围内,比方20,假设超过一定范围,那么搜索速度不会添加甚至会减慢。
2.2 优先搜索k-means树算法(The Priority Search K-MeansTree Algorithm)
随机k-d森林在很多情形下都非常有效,可是对于须要高精度的情形,优先搜索k-means树更加有效。 K-means tree 利用了数据固有的结构信息,它依据数据的全部维度进行聚类,而随机k-d tree一次仅仅利用了一个维度进行划分。
2.2.1 算法描写叙述
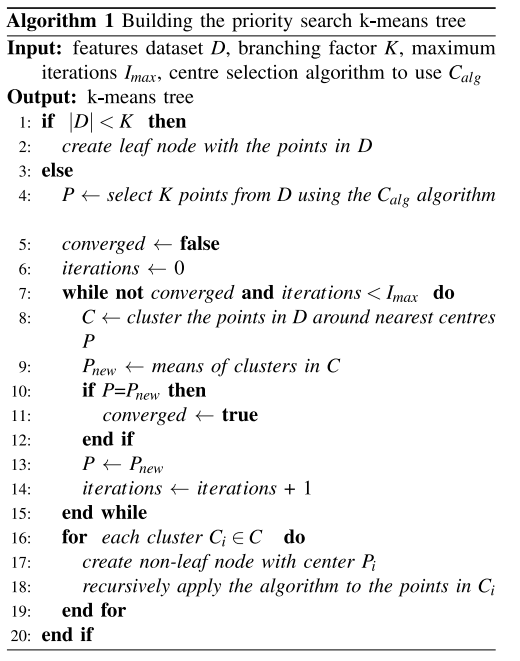
算法1 建立优先搜索k-means tree:
(1) 建立一个层次化的k-means 树;
(2) 每一个层次的聚类中心,作为树的节点;
(3) 当某个cluster内的点数量小于K时。那么这些数据节点将做为叶子节点。
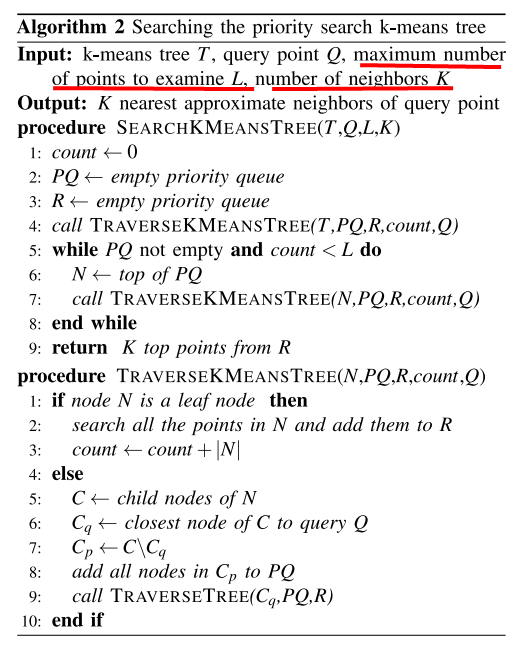
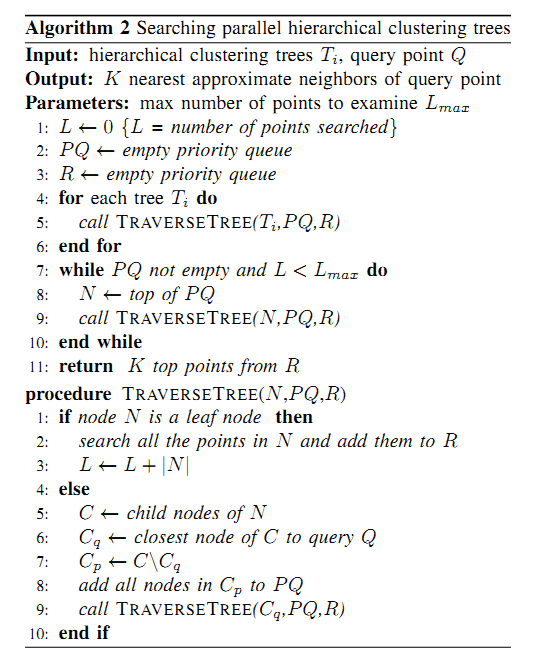
算法2 在优先搜索k-means tree中进行搜索:
(1) 从根节点N開始检索。
(2) 假设是N叶子节点则将同层次的叶子节点都添加到搜索结果中。count += |N|。
(3) 假设N不是叶子节点。则将它的子节点与query Q比較。找出近期的那个节点Cq。同层次的其它节点添加到优先队列中。
(4) 对Cq节点进行递归搜索;
(5) 假设优先队列不为空且 count<L。那么从取优先队列的第一个元素赋值给N,然后反复步骤(1)。
聚类的个数K,也称为branching factor 是个非常基本的參数。
建树的时间复杂度 = O( ndKI ( log(n)/log(K) )) n为数据点的总个数,I为K-means的迭代次数。搜索的时间复杂度 = O( L/K * Kd * ( log(n)/(log(K) ) ) = O(Ld ( log(n)/(log(K) ) )。
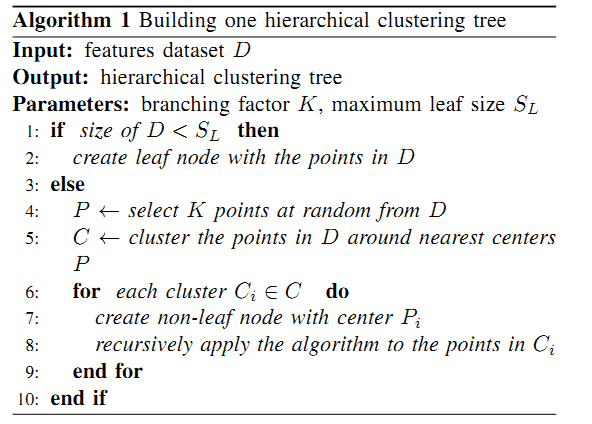
2.3 层次聚类树 (The Hierarchical ClusteringTree)
层次聚类树採用k-medoids的聚类方法。而不是k-means。
即它的聚类中心总是输入数据的某个点,可是在本算法中,并没有像k-medoids聚类算法那样去最小化方差求聚类中心,而是直接从输入数据中随机选取聚类中心点,这个方案在建立树时更加简单有效,同一时候又保持多棵树之间的独立性。
同一时候建立多棵树,在搜索阶段并行地搜索它们能大大提高搜索性能(归功于随机地选择聚类中心。而不须要多次迭代去获得更好的聚类中心)。建立多棵随机树的方法对k-d tree也十分有效,但对于k-means tree却不适用。
3. 參考文献
(1) ScalableNearest Neighbor Algorithms for High Dimensional Data. Marius Muja, Member,IEEE and David G. Lowe, Member, IEEE.
(2) OptimisedKD-trees for fast image descriptor matching. Chanop Silpa-Anan, Richard Hartley.
(3) FastMatching of Binary Features. Marius Muja and David G. Lowe.
posted on 2019-04-19 21:28 xfgnongmin 阅读(861) 评论(0) 编辑 收藏 举报


