I/O 设备
I/O 设备分类:人可读、机器可读和远程通信三类。
I/O 设备之间的差别:
- 数据传送速率
- 应用领域
- 控制的复杂性
- 传送单位
- 数据表示形式
- 错误条件
I/O 功能的组织
I/O 的三种技术
- 程序控制 I/O:处理器代表一个进程给 I/O 模块发送 I/O 命令,该进程进入忙等待,直到 I/O 完成才能继续执行。
- 中断驱动 I/O:处理器代表一个进程给 I/O 模块发送 I/O 命令,若该命令是非阻塞的,则发送命令的进程继续执行;若是阻塞的,则 OS 将该进程阻塞,执行另外的进程。
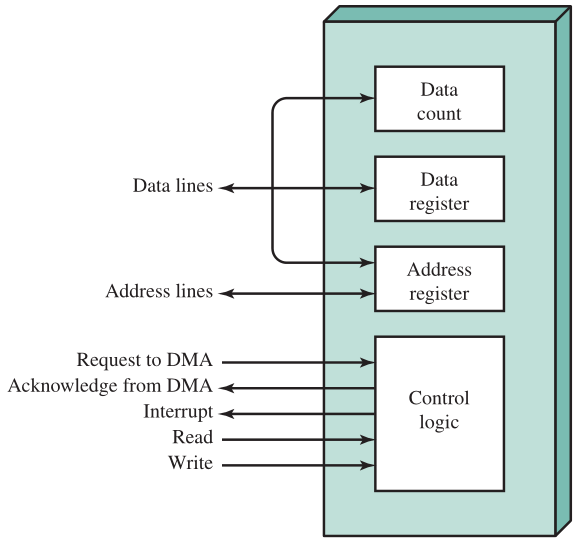
- 直接存储器访问(DMA):处理器向 DMA 模块发 I/O 命令,DMA 模块控制内存和 I/O 模块之间的数据交换。当 I/O 操作执行完成后,DMA 模块向处理器发信号告知执行完成。
I/O 功能的发展
- 处理器直接控制 I/O 设备,处理器需要知道 I/O 设备的细节。
- I/O 模块出现,处理器通过程序控制 I/O,不需要知道 I/O 设备细节。
- 处理器通过中断方式控制 I/O。
- DMA 模块出现,处理器通过 DMA 模块控制 I/O,仅在 I/O 传输的整个过程中的前后两个时间点处理器才和 DMA 模块交互。
- I/O 模块有自己的处理器,专门的指令集。CPU 指导 I/O 处理器交互。
- I/O 模块有自己的局部存储器,I/O 传输过程中 CPU 参与度更低。
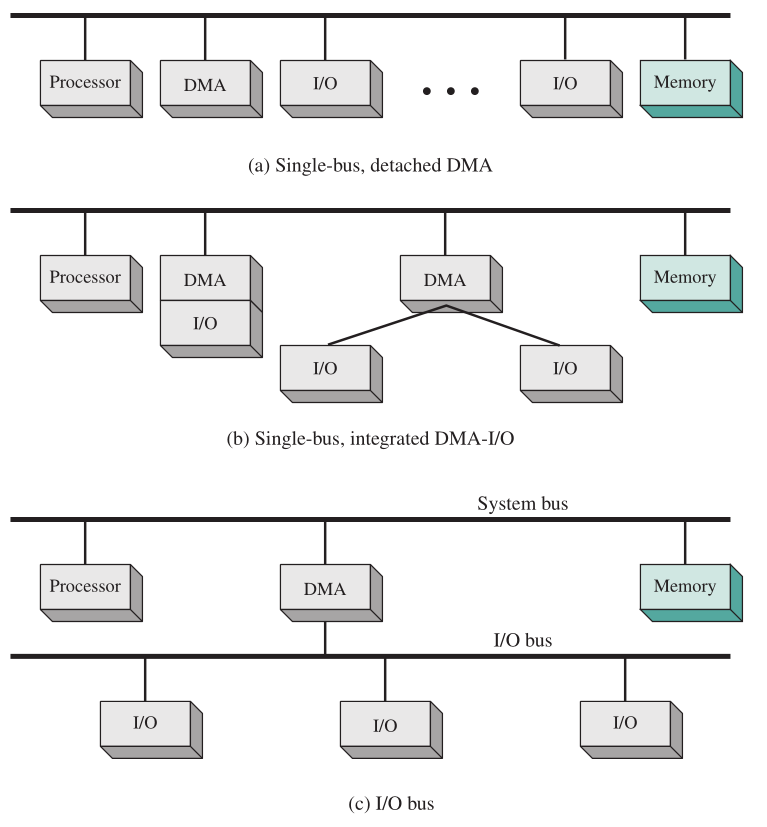
DMA 在计算机系统中的可能架构:
OS 设计问题
目标:效率和通用性。
I/O 操作一般是计算机系统的瓶颈。
通用性分两点:1.处理器看待 I/O 设备的方式;2.OS 管理 I/O 设备和 I/O 操作的方式。
I/O 的逻辑结构如下
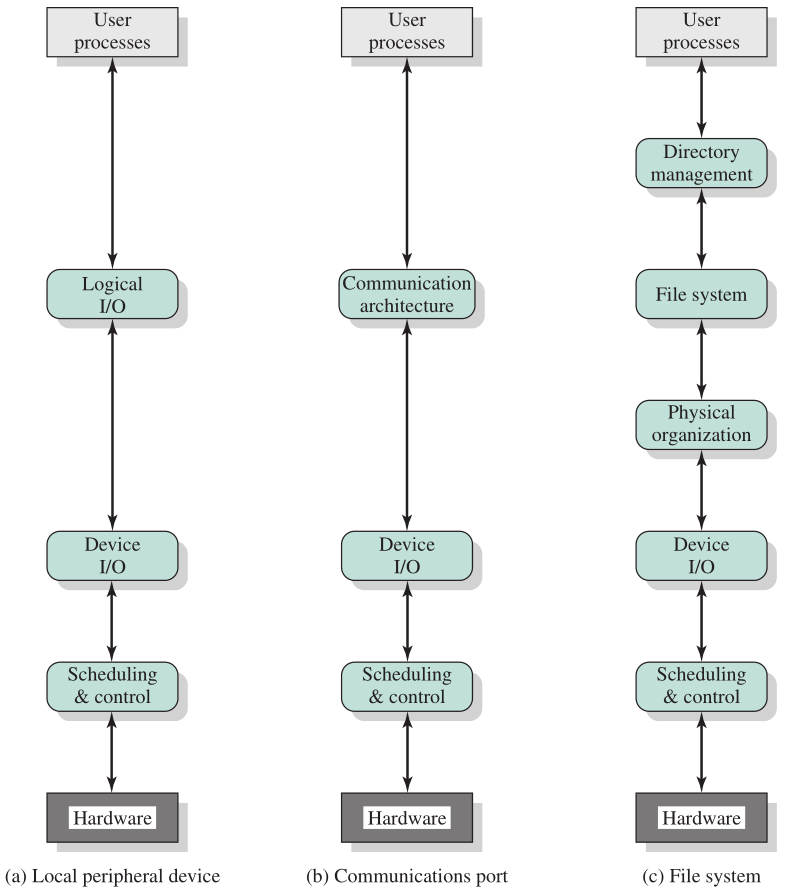
逻辑 I/O:将设备当作一个进程可以使用的资源,允许使用通用的读写命令操控。
设备 I/O:发出请求的指令和传输的设备在此转换成适当的 I/O 指令序列等。
调度和控制:实际和硬件打交道的层,处理中断,执行实际操作。
通信架构:比如网络传输的实际四层架构(TCP/IP)就属于这一层。
目录管理:用标识符表示文件,同时可以使用简单的命令操控文件。
文件系统:处理文件的逻辑结构和用户的操作。
物理组织:文件的逻辑结构到物理结构的转换。
I/O 缓冲
单进程死锁:当一个进程发出一个 I/O 请求后,被挂起等待结果,在开始 I/O 操作之前被换出,该进程阻塞,等待 I/O 事件的发生。此时 I/O 操作也被阻塞,等待该进程被换入。
原文:
If a process issues an I/O command, is suspended awaiting the result, and then is swapped out prior to the beginning of the operation, the process is blocked
waiting on the I/O event, and the I/O operation is blocked waiting for the process to be swapped in.
解决办法:发出 I/O 请求前,参与 I/O 操作的内存中用户进程空间被锁定。
I/O 设备
面向块:信息保存在固定大小的块中,传输以块为单位。
面向流:以字节流的方式传输数据。
缓冲:输入(I/O 设备到内存的数据传送)请求发出前开始执行输入传送,在输出请求发出一段时间后开始执行输出传送的技术。
单缓冲:OS 在内存的系统区域中分配一个区域,称为缓冲区。当输入时,数据先传输到该缓冲区,再从缓冲区传输到用户进程的内存区域中。输出时反过来。
双缓冲:和单缓冲相比,有两个缓冲区,可以在一个进程向缓冲区中传送数据时,OS 可以填充(清空)另一个缓冲区。这种方式也称缓冲交换。
循环缓冲:和双缓冲类似,使用的缓冲区大于 2 个。类似于有限缓冲区的生产者消费者模型。
缓冲作用:平滑 I/O 需求的峰值,提高 OS 效率和单个进程性能。
磁盘调度
性能参数
寻道时间:磁头定位到磁盘需要的时间。
旋转延迟:磁头到达扇区开始位置需要的时间。
存取时间:寻道时间+旋转延迟。到达读或者写位置需要的时间。
\(传输时间=\dfrac{传送的字节数}{一个磁道中的字节数 \times 旋转速度}\)
磁盘调度策略:
- FIFO:最简单,公平。适用于大部分请求访问的文件处于簇聚扇区。
- 优先级:较短的作业优先级较高,长作业优先级较低。不会优化磁盘的利用率。
- 后进先出(LIFO):提高吞吐量,缩短队列长度。
- 最短服务时间优先:选择使磁头从当前位置移动距离最短的磁盘 I/O 请求。
- SCAN(电梯算法):磁头从一个方向移动,处理完遇到的请求(该方向上没有待处理的请求了)或者到达该方向的边界时,反转,继续按此方式移动。
- C-SCAN(循环SCAN):磁头扫描固定在一个方向上。
- N 步 SCAN:将磁盘请求队列分成长度为 N 的子队列,每次使用 SCAN 处理一个队列,此时新的请求加入其他队列中。
- FSCAN:扫描开始时,所有请求处于一个队列中。在处理过程中,新请求到来,则加入另一个空队列中,直到队列处理完成。
RAID
RAID(redundant array of independent disks, RAID)称为独立磁盘冗余阵列。分为 0-6 共 7 个级别。三个特性:
- RAID 是一组物理磁盘驱动器,逻辑上视为一个。
- 数据分布在物理驱动器阵列中。
- 使用冗余磁盘保存奇偶校验信息,保证一个磁盘失效时,数据具有可恢复性。
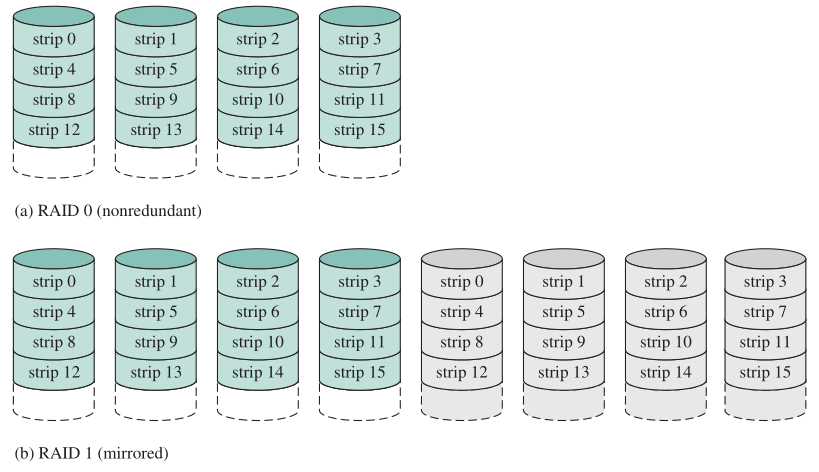
RAID1
RAID1 通过临时复制所有数据实现冗余。
优点:读请求可由包含被请求数据的任何一个磁盘提供服务;写请求需要对两个条带进行更新,可并行完成;从失效中恢复简单。
缺点:成本高。
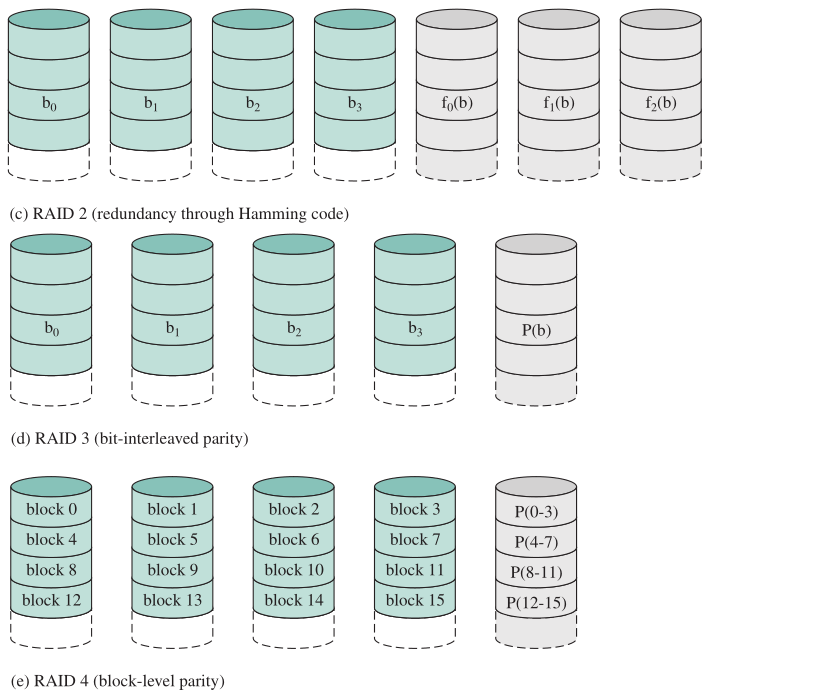
RAID2
使用的条带很小,只有 1 个字节或者字。对每个数据磁盘中相应位计算一个错误校正码(通常是汉明码),计算得到的码保存在多个奇偶校验磁盘对应的位中。
缺点:成本高。
优点:在可能发生许多磁盘错误的环境中是一种很好的选择。
RAID3
只需要一个冗余磁盘,为所有数据磁盘同一位置的位的集合计算一个简单的奇偶校验位。
优点:数据传送率高。
RAID4
数据条带较大。对每个数据磁盘中相应的条带计算一个逐位奇偶校验,保存在奇偶校验磁盘的相应条带中。
优点:适合需要 I/O 请求速度较高的进程。
缺点:不适合需要较高数据传输率的进程;写操作包含奇偶校验磁盘,该磁盘可能成为瓶颈。
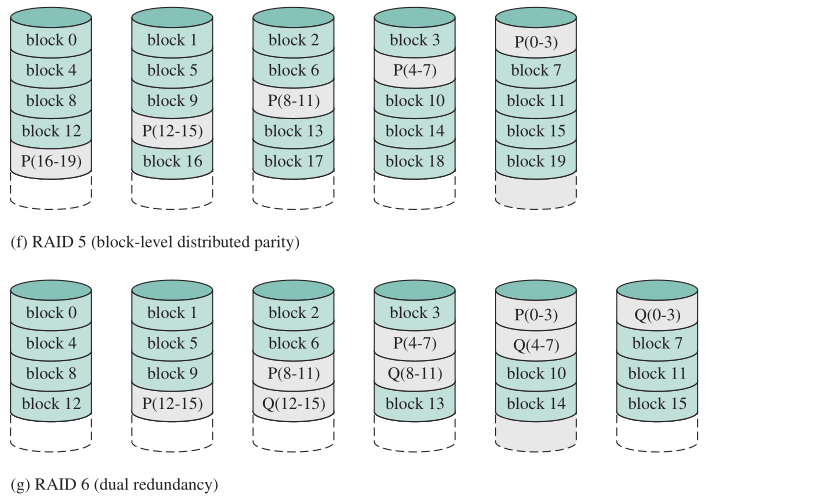
RAID5
将奇偶校验条带分布到所有磁盘中,按照循环分配方式。
优点:避免单个奇偶校验磁盘存在的瓶颈问题。
RAID6
需要的磁盘数为 N+2,N 为数据磁盘。使用两个不同的数据校验算法:异或计算和独立数据校验算法。
优点:极高的数据可用性。
缺点:严重的写性能损失。
磁盘高速缓存
磁盘高速缓存是内存中为磁盘扇区设置的一个缓冲区,包含磁盘中某些扇区的副本。
命中时,两种方式:第一种,将缓冲区扇区复制到用户进程空间内存区域;第二种,将指向缓冲区的特定扇区的指针传给特定进程。
置换策略
- 最近最少使用(LRU):置换在高速缓存中未被访问的时间最长的块。
- 最长不常使用页面置换算法(least frequently used, LFU):置换缓冲区中访问次数最少的块。
- 基于频率的置换算法:将缓冲区逻辑上视为栈,将栈的区域按照离栈顶的距离划分成三部分。离栈顶最近为新区,其次为中间区,最远为老区。新块进入缓冲区时进入栈顶,访问计数为 1。新区中的块被访问,计数不变,其他区访问计数随之增加。同时,被置换的块只能在老区选择,置换时选择访问计数最小的块。
参考
[1] William Stallings, 操作系统——精髓与设计原理(8th), 2017.
 posted on
posted on

 浙公网安备 33010602011771号
浙公网安备 33010602011771号