凸包-Graham扫描法
凸包
简介
凸包 \((Convex Hull)\) 是一个计算几何(图形学)中的概念。
在一个实数向量空间\(V\)中,对于给定集合\(X\),所有包含X的凸集的交集\(S\)被称为\(X\)的凸包。\(X\)的凸包可以用\(X\)内所有点\((X1,...Xn)\)的凸组合来构造.
在二维欧几里得空间中,凸包可想象为一条刚好包著所有点的橡皮圈。
用不严谨的话来讲,给定二维平面上的点集,凸包就是将最外层的点连接起来构成的凸多边形,它能包含点集中所有的点。
性质
凸包用最小的周长围住了给定的所有点;
如果一个凹多边形围住了所有的点,它的周长一定不是最小;
如下图。根据三角不等式,凸多边形在周长上一定是最优的;
前置知识
叉积
两个向量 \(A(x1,y1)\) , \(B(x2,y2)\)
的叉积为 \(x1 \times y2−x2 \times y1x1 \times y2−x2 \times y1\) ;
先放出代码
inline ll cross(node p,node a,node b)
{
ll a1,b1,a2,b2;
a1=a.x-p.x; b1=a.y-p.y;
a2=b.x-p.x; b2=b.y-p.y;
return a1*b2-a2*b1;
}
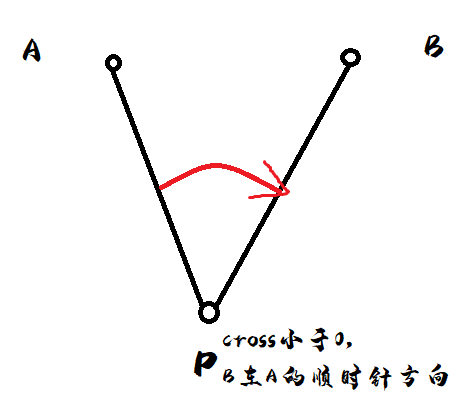
对于这个函数如果函数值为正数说明,\(B\) 在 \(A\) 的逆时针方向;
如果函数值为负数说明,\(B\) 在 \(A\) 的顺时针方向;
如果函数值为 \(0\) 说明, \(A\) ,\(B\) ,\(P\) 三点共线;

求三点的三角形面积
\(S= \frac{1}{2} abs((x1−x3) \times (y2−y3)−(x2−x3) \times (y1−y3))\) ;
算法:Graham扫描法
复杂度 : n (log (n)) ;
思路
大概做法是找到一个点,朝一个方向不断加点,保证所有的点在里面并且是一个凸多边形;
具体找到一个纵坐标最小的点作为基点,若有多个则选取横坐标最小的点;
然后以基点为原点构造平面直角坐标系,按每个点到原点的直线与 x 轴的夹角 从小到大排序;
排序可以利用叉积判断点位置关系;
如图

之后利用叉积性质,例如:
栈元素: \(p0\) , \(p1\) ; 利用叉积判断 线段\(p0p1\) 是否在 \(p1p2\) 的逆时针方向; 满足入队;
栈元素: \(p0\) , \(p1\) , \(p2\) ; 判断 线段\(p1p2\) 是否在 \(p2p3\) 的逆时针方向; 不满足 \(p2\) 出队;
。。。。。。
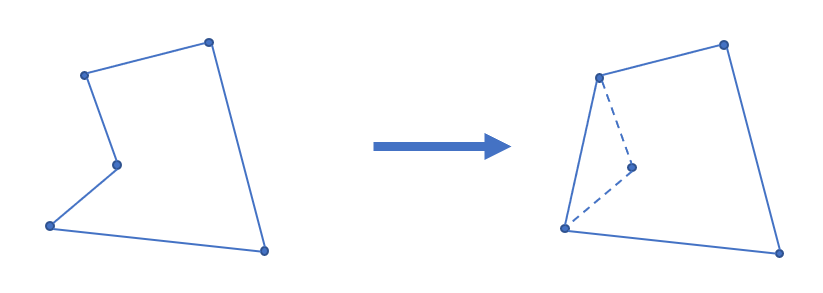
简单来说就是每次去掉那个往内部凹的角;
动图GIF

代码
inline ll cross(node p,node a,node b)//叉积公式
{
ll a1,b1,a2,b2;
a1=a.x-p.x; b1=a.y-p.y;
a2=b.x-p.x; b2=b.y-p.y;
return a1*b2-a2*b1;
}
inline ll cmp(node x,node y)
{
ll sum=cross(p[1],x,y);
if(sum>0) return 1;//sum 大于零说明,y 在 x 的逆时针方向
if(sum<0) return 0;//sum 小于零说明,y 在 x 的顺时针方向
return dis(x,p[1])<dis(y,p[1]); //如果三点共线,近的排在前面
}
inline void convex_hull()
{
node a=(node){1<<30,1<<30};
ll id=0;
for(re ll i=1;i<=n;i++)
if(p[i].y<a.y||(p[i].y==a.y&&p[i].x<a.x))
{
a=p[i];
id=i;
}//确定纵坐标最小的基点
swap(p[1],p[id]);
sort(p+2,p+n+1,cmp);//除基点外 排序
aa[++top]=p[1];
aa[++top]=p[2];
for(re ll i=3;i<=n;i++)
{
while(top>1&&cross(aa[top],aa[top-1],p[i])>=0)//如果出现凹下去的地方
top--; //退栈
aa[++top]=p[i];
}
}
