
基于OpenCV实现对图片及视频中感兴趣区域颜色识别
基于OpenCV实现图片及视频中选定区域颜色识别
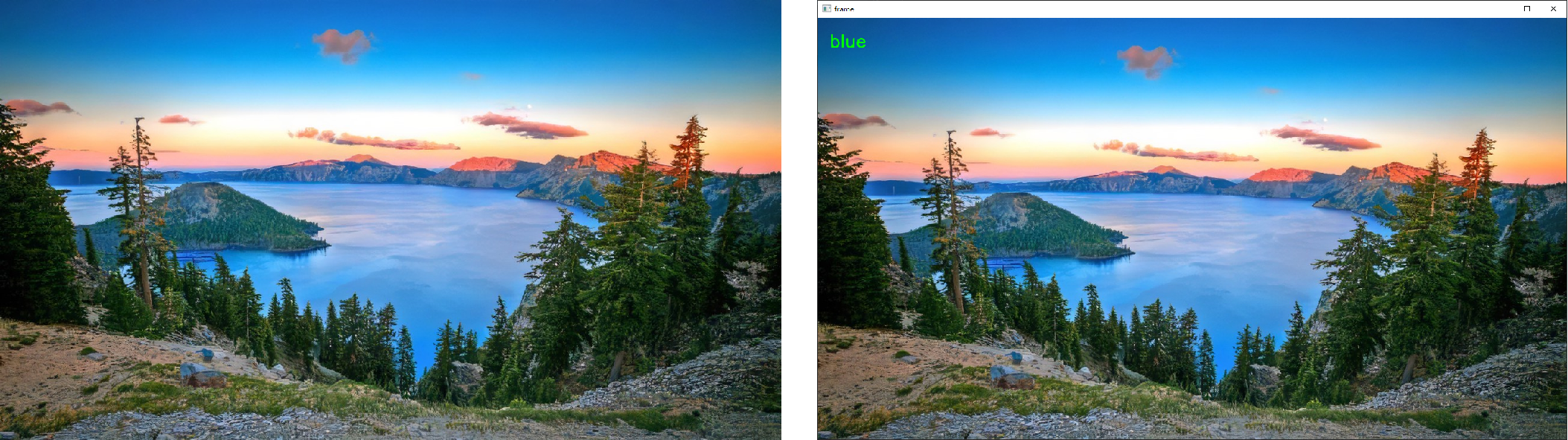
近期,需要实现检测摄像头中指定坐标区域内的主体颜色,通过查阅大量相关的内容,最终实现代码及效果如下,具体的实现步骤在代码中都详细注释,代码还可以进一步优化,但提升有限。
主要实现过程:按不同颜色的取值范围,对图像进行循环遍历,转换为灰度图,将本次遍历的颜色像素转换为白色,对白色部分进行膨胀处理,使其更加连续,计算白色部分外轮廓包围的面积累加求和,比较每种颜色围起来面积,保存最大值及其颜色,所有颜色遍历完后,返回最大值对应的颜色,显示在图像上
如果有类似的颜色识别的任务,可参考以下代码修改后实现具体需求
colorList.py
import numpy as np
import collections
# 将rgb图像转换为hsv图像后,确定不同颜色的取值范围
def getColorList():
dict = collections.defaultdict(list)
# black
lower_black = np.array([0, 0, 0])
upper_black = np.array([180, 255, 46])
color_list_black = []
color_list_black.append(lower_black)
color_list_black.append(upper_black)
dict['black'] = color_list_black
# gray
lower_gray = np.array([0, 0, 46])
upper_gray = np.array([180, 43, 220])
color_list_gray= []
color_list_gray.append(lower_gray)
color_list_gray.append(upper_gray)
dict['gray'] = color_list_gray
# white
lower_white = np.array([0, 0, 221])
upper_white = np.array([180, 30, 255])
color_list_white = []
color_list_white.append(lower_white)
color_list_white.append(upper_white)
dict['white'] = color_list_white
# red
lower_red = np.array([156, 43, 46])
upper_red = np.array([180, 255, 255])
color_list_red = []
color_list_red.append(lower_red)
color_list_red.append(upper_red)
dict['red'] = color_list_red
# red2
lower_red = np.array([0, 43, 46])
upper_red = np.array([10, 255, 255])
color_list_red2 = []
color_list_red2.append(lower_red)
color_list_red2.append(upper_red)
dict['red2'] = color_list_red2
# orange
lower_orange = np.array([11, 43, 46])
upper_orange = np.array([25, 255, 255])
color_list_orange = []
color_list_orange.append(lower_orange)
color_list_orange.append(upper_orange)
dict['orange'] = color_list_orange
# yellow
lower_yellow = np.array([26, 43, 46])
upper_yellow = np.array([34, 255, 255])
color_list_yellow = []
color_list_yellow.append(lower_yellow)
color_list_yellow.append(upper_yellow)
dict['yellow'] = color_list_yellow
# green
lower_green = np.array([35, 43, 46])
upper_green = np.array([77, 255, 255])
color_list_green = []
color_list_green.append(lower_green)
color_list_green.append(upper_green)
dict['green'] = color_list_green
# cyan
lower_cyan = np.array([78, 43, 46])
upper_cyan = np.array([99, 255, 255])
color_list_cyan = []
color_list_cyan.append(lower_cyan)
color_list_cyan.append(upper_cyan)
dict['cyan'] = color_list_cyan
# blue
lower_blue = np.array([100, 43, 46])
upper_blue = np.array([124, 255, 255])
color_list_blue = []
color_list_blue.append(lower_blue)
color_list_blue.append(upper_blue)
dict['blue'] = color_list_blue
# purple
lower_purple = np.array([125, 43, 46])
upper_purple = np.array([155, 255, 255])
color_list_purple = []
color_list_purple.append(lower_purple)
color_list_purple.append(upper_purple)
dict['purple'] = color_list_purple
return dict
if __name__ == '__main__':
color_dict = getColorList()
print(color_dict)
num = len(color_dict)
print('num=', num)
for d in color_dict:
print('key=', d)
print('value=', color_dict[d][1])
image_color_realize.py
import cv2
import colorList
# 实现对图片中目标区域颜色的识别
def get_color(frame):
print('go in get_color')
hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)
maxsum = 0
color = None
color_dict = colorList.getColorList()
# count = 0
for d in color_dict:
mask = cv2.inRange(hsv, color_dict[d][0], color_dict[d][1]) # 在后两个参数范围内的值变成255
# mask = cv2.medianBlur(mask, 3) # 中值滤波
binary = cv2.threshold(mask, 127, 255, cv2.THRESH_BINARY)[1] # 在灰度图片中,像素值大于127的都变成255,[1]表示调用图像,也就是该函数第二个返回值
# cv2.imshow("0",binary)
# cv2.waitKey(0)
# count+=1
binary = cv2.dilate(binary, None, iterations=2) # 使用默认内核进行膨胀操作,操作两次,使缝隙变小,图像更连续
cnts = cv2.findContours(binary, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)[-2] # 获取该函数倒数第二个返回值轮廓
sum = 0
for c in cnts:
sum += cv2.contourArea(c) # 获取该颜色所有轮廓围成的面积的和
# print("%s , %d" %(d, sum ))
if sum > maxsum:
maxsum = sum
color = d
if color == 'red2':
color = 'red'
elif color == 'orange':
color = 'yellow'
elif color == 'purple' or color == 'blue' or color == 'cyan' or color == 'white' or color == 'green':
color = 'normal'
return color
if __name__ == '__main__':
filename = "C:/Users/admin/Desktop/water_samples/live01.jpg"
frame = cv2.imread(filename)
# frame = frame[180:280, 180:380] # [y:y+h, x:x+w] 注意x,y顺序
color = get_color(frame)
# 绘制文本
cv2.putText(img=frame,text=color,org=(20,50),fontFace=cv2.FONT_HERSHEY_SIMPLEX,
fontScale=1.0,color=(0,255,0),thickness=2)
# cv2.namedWindow('frame',cv2.WINDOW_NORMAL) # 设置显示窗口可调节
cv2.imshow('frame',frame)
cv2.waitKey(0)
video_color_realize.py
import cv2
import xf_color
# 对视频或摄像头获取的影像目标区域颜色进行识别
cap = cv2.VideoCapture("C:/Users/admin/Desktop/water_samples/01.mp4")
# cap = cv2.VideoCapture(0)
cap.set(cv2.CAP_PROP_FRAME_WIDTH, 1100) # 这里窗口大小调节只对摄像头有效
cap.set(cv2.CAP_PROP_FRAME_HEIGHT, 750)
while cap.isOpened():
ret, frame0 = cap.read()
# 对图像帧进行翻转(因为opencv图像和我们正常是反着的) 视频是正常的,摄像头是反转的
# frame0 = cv2.flip(src=frame0, flipCode=2)
# frame = frame[180:280, 180:380] # [y:y+h, x:x+w]
# frame = frame0[200:400, 100:300] # 设置检测颜色的区域,四个顶点坐标
frame = frame0
# frame=cv2.resize(src=frame,dsize=(750,600))
# hsv_frame = cv2.cvtColor(src=frame, code=cv2.COLOR_BGR2HSV)
# 获取读取的帧的高宽
height, width, channel = frame.shape
# color = xf_color.get_color(hsv_frame)
color = xf_color.get_color(frame)
# 绘制文本
cv2.putText(img=frame0, text=color, org=(20, 50), fontFace=cv2.FONT_HERSHEY_SIMPLEX,
fontScale=1.0, color=(0, 255, 0), thickness=2)
cv2.imshow('frame', frame0)
key = cv2.waitKey(1)
if key == 27:
break
cap.release()
cv2.destroyAllWindows()
if __name__ == '__main__':
print('Pycharm')
效果如下:
示例图片1

示例图片2
示例图片3

作者:wangyudong
本文版权归作者和博客园共有,欢迎转载,但必须给出原文链接,并保留此段声明,否则保留追究法律责任的权利。


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· TypeScript + Deepseek 打造卜卦网站:技术与玄学的结合
· 阿里巴巴 QwQ-32B真的超越了 DeepSeek R-1吗?
· 如何调用 DeepSeek 的自然语言处理 API 接口并集成到在线客服系统
· 【译】Visual Studio 中新的强大生产力特性
· 2025年我用 Compose 写了一个 Todo App