
只要你用ReLU,就是“浅度学习”:任意ReLU神经网络都有等效3层网络
前言 只要你用了ReLU,我们就是好朋就是“浅度学习”。
本文转载自量子位
仅用于学术分享,若侵权请联系删除
欢迎关注公众号CV技术指南,专注于计算机视觉的技术总结、最新技术跟踪、经典论文解读、CV招聘信息。
【CV技术指南】CV全栈指导班、基础入门班、论文指导班 全面上线!!
最近有研究证明,所有基于ReLU的深度神经网络都可以重写为功能相同的3层神经网络。
基于这个证明,伦敦国王学院的研究团队还提出一种为任意ReLU网络找到相应浅层网络的算法。
由此产生的浅层网络是透明的,可用于解释网络的行为。
只要通过算法,就能找到任意深度ReLU网络的对应浅层网络。
对此网友惊呼:我要读这篇论文,立刻马上!
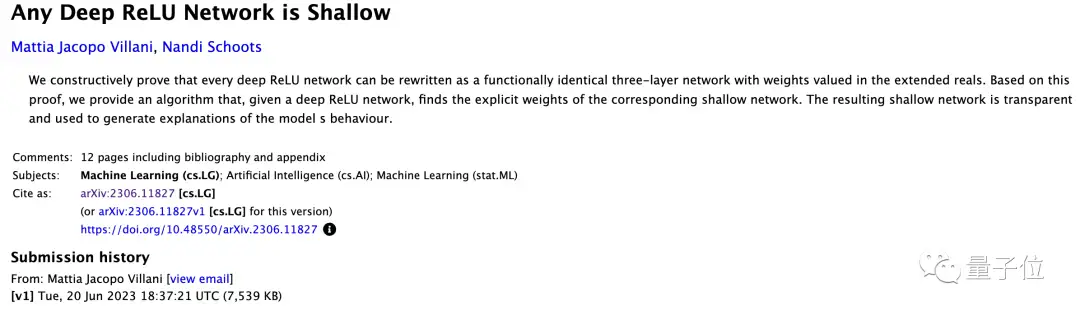
任何深度ReLU网络都是浅层的
ReLU是深度学习领域最常用的一种激活函数,由Nair & Hintonw在2010为限制玻尔兹曼机(restricted Boltzmann machines)提出的。
由于常常在实践中有着比其他常用激励函数(例如逻辑函数)更好的效果,而被深度神经网络广泛用于图像识别等计算机视觉人工智能领域。
论文指出,每个深度ReLU网络都可以转换为一个功能相同且具有“三个隐藏层”的浅层网络。并提供了一个找到对应浅层网络权重的算法,提高神经网络的全局可解释性。
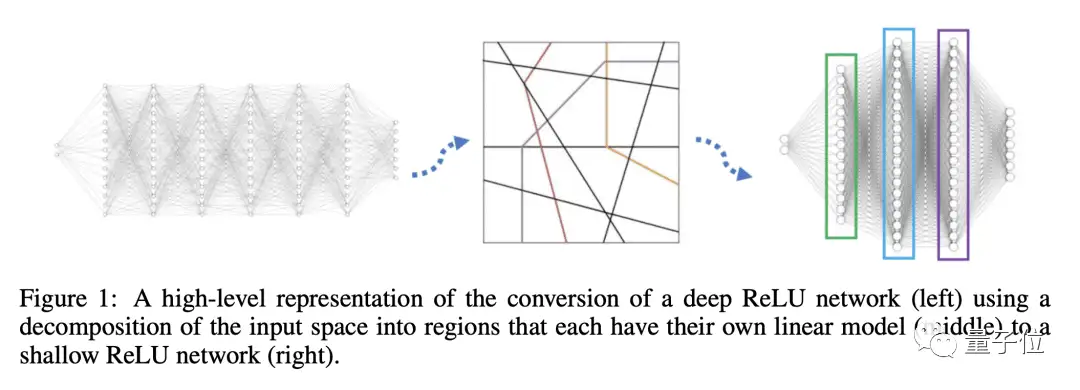
简单来说就是,通过划分输入空间,使用线性函数对每个分区进行建模,来实现深层网络浅化。
具体分为这三步。
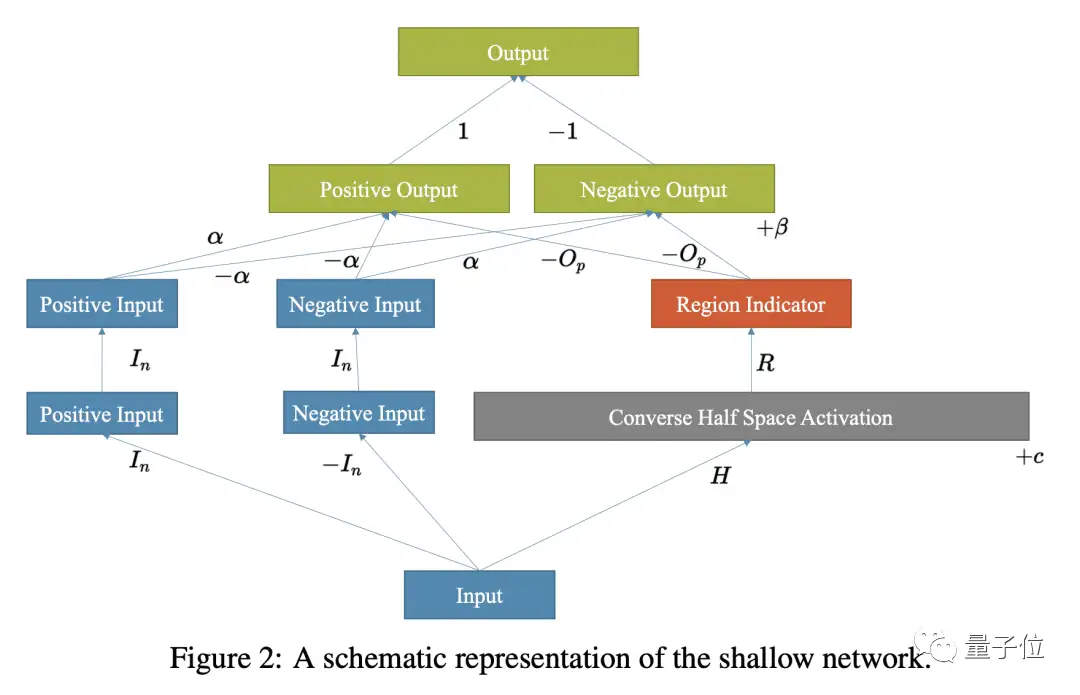
首先,需要构建一个将线性模型和半空间编码的第一层,通过使用一个矩阵来表示半空间条件,其中每个行向量表示一个半空间的线性方程。
然后,构建第二层,该层根据输入的所属区域决定哪些边界是活跃的。
最后,构建第三层,通过将输入与每个线性模型相乘并使用指示函数来选择正确的模型。
基于此,每一个深度ReLU网络都可以被转换为一个功能上相同的三层网络,其权重值在扩展实数中。
当然要完成浅化,还需要一些咒(suan)语(fa)。

根据论文,使用算法时只需找到H、c、α、β这些参数,并知道每个区域所需的半空间就可以,主要分三步。
首先,识别可行的模式集,对于每个可行模式,计算全局线性规划的参数A(l)和d(l)。
然后,确定半空间条件,将这些矩阵堆叠起来,确定每个激活模式的半空间条件。最终得到矩阵H和向量c。
最后,计算局部线性模型,根据模型的权重和激活模式,使用显式公式,计算局部线性模型α和β。
简单理解,就是根据已训练好的网络,通过启发式搜索在可能的神经元激活空间中找到合适的权重值。
通过构建浅层白盒网络,能够快速计算出每个数据点的SHAP值,大大提高数据的可解释性。
实验表明,通过上面算法就可以找到给定深度ReLU网络对应的浅层网络的显式权重。
网友:实验很酷,但也有些问题
论文很新颖的提出一个算法,可以实现“深转浅”,不过该方法仍有一些缺点。
比如构建浅层网络使用了无限权重,尽管这些权重可以在Python中实现,但不能使用梯度下降进行微调。
当然,“找茬儿”这块,怎能少得了热心肠的网友。
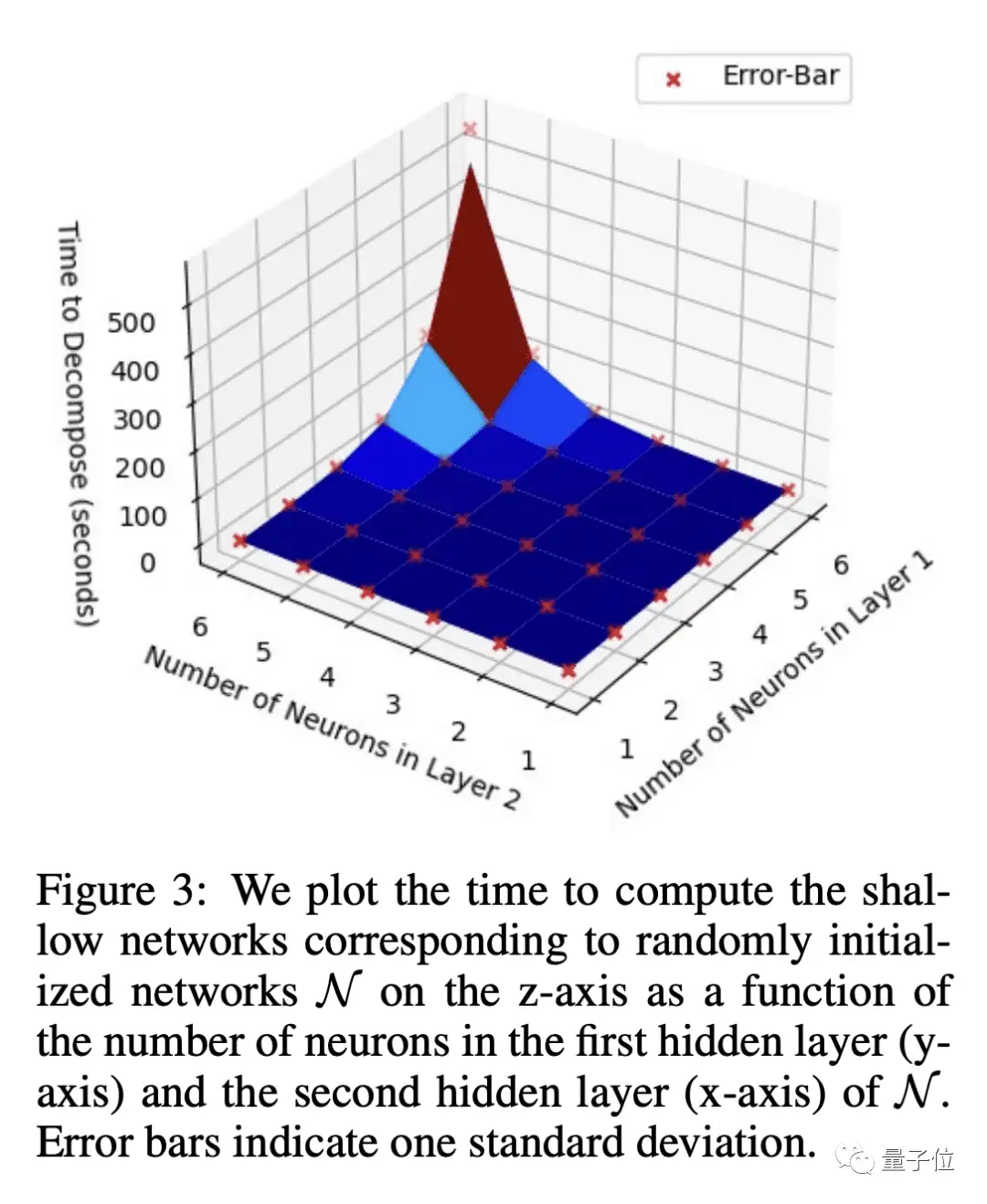
根据论文可以发现,如果使用团队提供的算法,实验过程中计算时间其实是会随着神经元数量增加呈指数增长。
所以就有网友提出疑惑:算法运行时间与神经元数量成指数关系,12个神经元需要近10分钟,那计算一个普通大小的DNN所需时间岂不是长了去了……
网友指出:假设单层神经网络可以计算任何函数,那么对于任何神经网络来说,这不是都成立吗?
对于这个研究,也有网友犀利表示:这就是个「普遍逼近定理」,没什么大惊小怪的。
不过无论网友怎么说,这篇论文仍然有一些出彩点。
比如,通过这个方式得到的浅层网络是透明的,可以用来生成模型行为的解释。
此外还提供了用于复现实验的代码,供其他研究人员使用来探索和实验。
论文地址已经贴在下面,感兴趣可以去看看~
论文传送门:
https://arxiv.org/abs/2306.11827
参考链接:
[1]https://twitter.com/mathemagic1an/status/1672430954152083456?s=46&t=iTysI4vQLQqCNJjSmBODPW
欢迎关注公众号CV技术指南,专注于计算机视觉的技术总结、最新技术跟踪、经典论文解读、CV招聘信息。
【技术文档】《从零搭建pytorch模型教程》122页PDF下载
QQ交流群:470899183。群内有大佬负责解答大家的日常学习、科研、代码问题。
其它文章
中科院自动化所发布FastSAM | 精度相当,速度提升50倍!!!
大核卷积网络是比 Transformer 更好的教师吗?ConvNets 对 ConvNets 蒸馏奇效
MaskFormer:将语义分割和实例分割作为同一任务进行训练
CVPR 2023 VAND Workshop Challenge零样本异常检测冠军方案
沈春华团队最新 | SegViTv2对SegViT进行全面升级,让基于ViT的分割模型更轻更强
刷新20项代码任务SOTA,Salesforce提出新型基础LLM系列编码器-解码器Code T5+
CVPR最佳论文颁给自动驾驶大模型!中国团队第一单位,近10年三大视觉顶会首例
最新轻量化Backbone | FalconNet汇聚所有轻量化模块的优点,成就最强最轻Backbone
libtorch教程(一)开发环境搭建:VS+libtorch和Qt+libtorch
NeRF与三维重建专栏(三)nerf_pl源码部分解读与colmap、cuda算子使用
NeRF与三维重建专栏(二)NeRF原文解读与体渲染物理模型
BEV专栏(一)从BEVFormer深入探究BEV流程(上篇)
可见光遥感图像目标检测(三)文字场景检测之Arbitrary

 浙公网安备 33010602011771号
浙公网安备 33010602011771号