CVPR最佳论文颁给自动驾驶大模型!中国团队第一单位,近10年三大视觉顶会首例
前言 这个高光时刻,属于自动驾驶,属于大模型,更是属于中国团队。
本文转载自量子位
仅用于学术分享,若侵权请联系删除
欢迎关注公众号CV技术指南,专注于计算机视觉的技术总结、最新技术跟踪、经典论文解读、CV招聘信息。
【CV技术指南】CV全栈指导班、基础入门班、论文指导班 全面上线!!
就在刚刚,CVPR 2023最佳论文新鲜出炉,2篇论文从总量高达9155篇的投稿中脱颖而出。
对于这2篇最佳论文中的任何一个,可以说用“万里挑一”来形容都不足为过了。
第一篇名为Planning-oriented Autonomous Driving(以路径规划为导向的自动驾驶),由上海人工智能实验室、武汉大学及商汤科技联合完成。
据了解,这是近十年来,计算机视觉三大顶级国际会议(CVPR、ICCV、ECCV)上,第一篇以中国学术机构作为第一单位的最佳论文。
第二篇名为Visual Programming: Compositional visual reasoning without training(视觉编程:未经训练的组合视觉推理),由艾伦人工智能研究所发表。
而在最佳论文的“候选名单”中,不乏谷歌、斯坦福大学、康奈尔大学等在内的顶尖企业和高校。
竞争之激烈,可见一斑。
那么这两篇为何能在众多论文中成为佼佼者,我们继续往下看。
首次提出感知决策一体的自动驾驶通用大模型
自动驾驶历来被人们称为集AI技术之大成者。
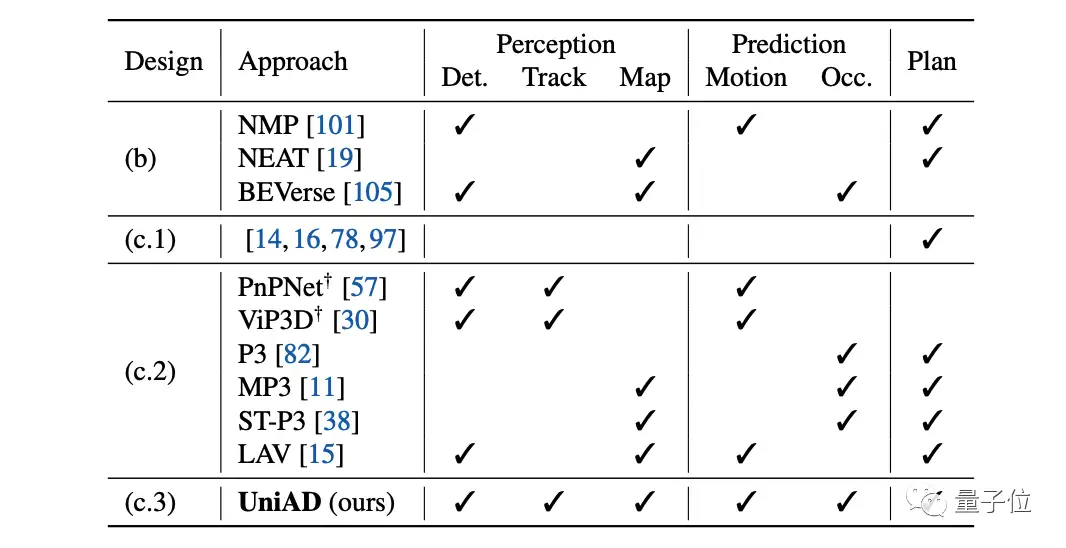
一般在自动驾驶任务中,通常包含三大模块,分别是感知、预测和规划,不过主流方案通常是分开来处理具体任务。
由此导致的缺陷也是比较明显,要么是任务之间协调不足,要么是影响到了整体性能的提升。
基于这样的一个背景,这篇论文便首次提出了感知决策一体化的自动驾驶通用大模型——UniAD。
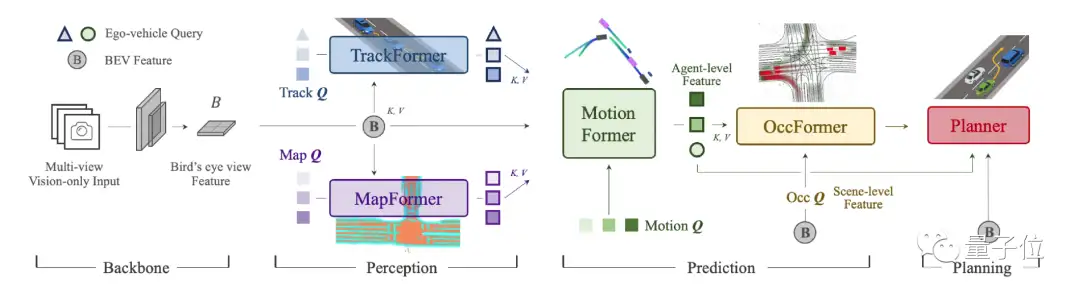
UniAD是一个综合框架,将全栈驾驶任务整合到一个基于Transformer的端到端网络中。
除了我们刚才提到的三个主任务之外,还包括六个子任务,包括目标检测、目标跟踪、场景建图、轨迹预测、栅格预测和路径规划。
那么如此“大一统”的方式之下,结果又如何?
根据论文显示,在nuScenes真实场景数据集中,UniAD的所有任务均达到SOTA!
具体“实战”效果如下:

在面对采访时,上海人工智能实验室青年科学家李弘扬介绍:
凭借其充分的可解释性、安全性、与多模块的可持续迭代性,UniAD是目前为止最具希望实际部署的端到端模型。
值得一提的是,除了这篇最佳论文之外,上海人工智能实验室和商汤科技在本届CVPR中均取得了不凡的表现。
两个单位还联合斩获了一篇最佳论文候选,共计54篇论文被接收。
通过编写代码解决计算机视觉任务的AI
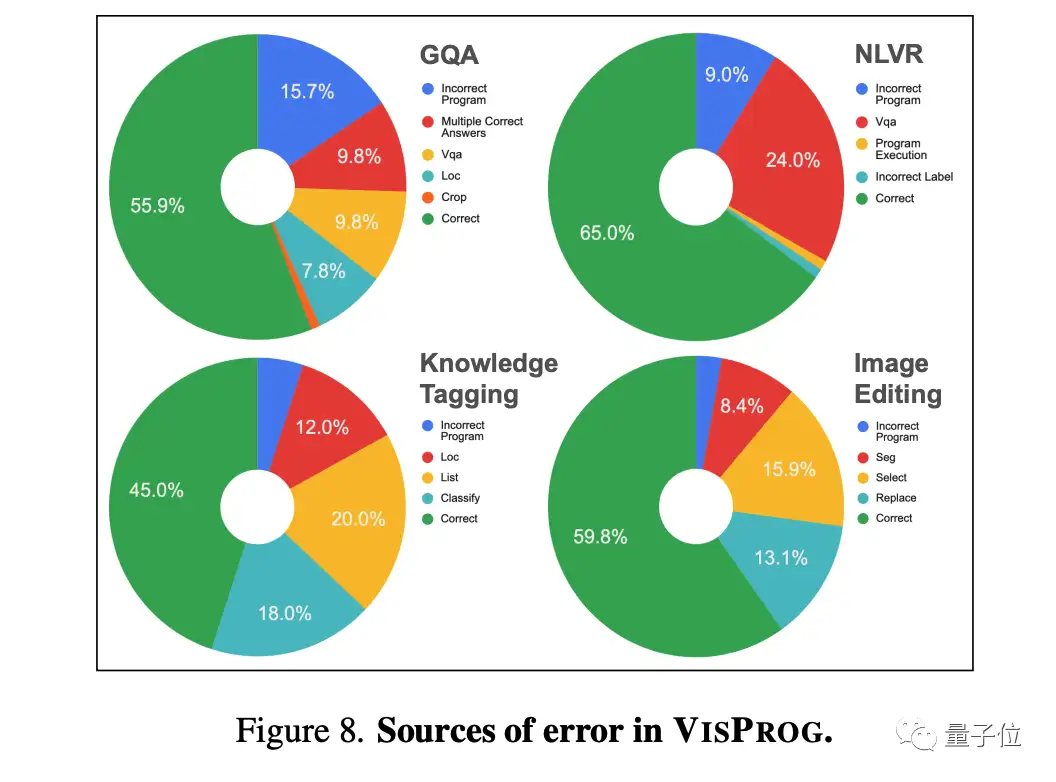
在第二篇论文中,研究人员提出了VISPROG,是一种神经符号结合(Neuro-Symbolic)的方法,用于在给定自然语言指令的情况下解决复杂和组合的视觉任务。
VISPROG无需对任何特定任务进行专门训练。
相反,它利用大语言模型的上下文学习能力,生成类似Python代码的模块化程序,然后执行这些程序来获得解决方案和全面且可解释的理由。
生成的程序的每一行可能会调用多个现成的计算机视觉模型、图像处理程序或Python函数,来生成可能被程序的后续部分使用的中间输出。
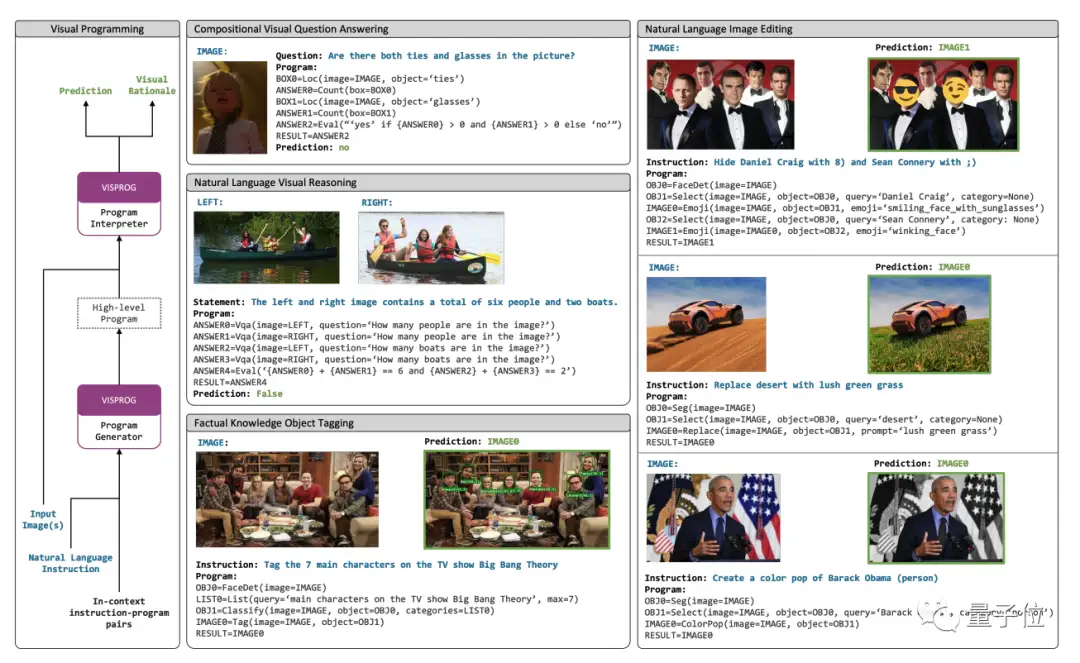
研究人员在四个不同的任务上展示了VISPROG的灵活性,包括组合视觉问答、对图像对进行零样本推理、事实知识对象标签和以语言引导的图像编辑。
研究人员表示:
像VISPROG这样的神经符号方法是令人兴奋的,它可以轻松有效地对AI系统做扩展,满足人们可能希望执行的复杂任务需求。
CVPR 2023其它奖项一览
除了2篇最佳论文之外,其它奖项也在刚刚的开幕式中逐一浮出水面。
最佳学生论文——
3D Registration with Maximal Cliques。
这篇论文的作者来自西北工业大学,提出了一种新的3D点云配准方法,能够获得最优的姿态假设。
最佳学生论文荣誉奖——
DreamBooth: Fine Tuning Text-to-lmage Diffusion Models for Subject-Driven Generation。
来自谷歌,可以基于少量的图片,利用text-to-image模型将其转换到不同场景中,并且保持高分辨率。
这篇论文的方法已在AI绘画社区被广泛使用。
除此之外,大会还颁发了PAMITC奖,包括Longuet-Higgins奖、年轻研究者奖以及Thomas Huang纪念奖。
Longuet-Higgins奖——
年轻研究者奖——
Thomas Huang纪念奖——

关于本届最佳论文更细致的内容,可戳下方链接查看详情:
两篇最佳论文地址:
[1]https://arxiv.org/abs/2212.10156
[2]https://arxiv.org/abs/2211.11559
参考链接:
[1]https://twitter.com/cvpr/status/1671545306838626306?s=46&t=iTysI4vQLQqCNJjSmBODPw
[2]https://mp.weixin.qq.com/s/8svV4yxRi6TikcRivgHr_A
[3]https://finance.eastmoney.com/a/202306212759316444.html
[4]https://github.com/OpenDriveLab/UniAD
[5]https://blog.allenai.org/visual-programming-ca58c7af51cd
欢迎关注公众号CV技术指南,专注于计算机视觉的技术总结、最新技术跟踪、经典论文解读、CV招聘信息。
【技术文档】《从零搭建pytorch模型教程》122页PDF下载
QQ交流群:470899183。群内有大佬负责解答大家的日常学习、科研、代码问题。
其它文章
ICLR2023 | 扩散生成模型新方法:极度简化,一步生成
小内存有救了!Reversible ViT:显存减少15倍,大模型普及曙光初现!
此「错」并非真的错:从四篇经典论文入手,理解Transformer架构图「错」在何处
CVPR 2023 | 即插即用!SQR:对于训练DETR-family目标检测的探索和思考
CVPR 2023 Highlight | 西湖大学提出一种全新的对比多模态变换范式
libtorch教程(一)开发环境搭建:VS+libtorch和Qt+libtorch
NeRF与三维重建专栏(三)nerf_pl源码部分解读与colmap、cuda算子使用
NeRF与三维重建专栏(二)NeRF原文解读与体渲染物理模型
BEV专栏(一)从BEVFormer深入探究BEV流程(上篇)
可见光遥感图像目标检测(三)文字场景检测之Arbitrary

 浙公网安备 33010602011771号
浙公网安备 33010602011771号