BEV专栏(零)BEV概述
前言 视觉为中心的俯视图(BEV)感知是一种从鸟瞰视角观察场景的感知技术,它可以提供更全面、更准确的环境感知信息。BEV技术已经在自动驾驶、智能交通、物流配送等领域得到广泛应用和研究,因为它能够有效地解决传统单目、双目视觉感知技术在场景感知范围、视野盲区、姿态变化等方面的限制。
本BEV专栏将从BEV技术的背景意义、重点难点、研究方向、应用场景、数据集、评价指标等多个方面进行了概述和介绍,并对未来的发展方向进行了展望。
本教程禁止转载。同时,本教程来自知识星球【CV技术指南】更多技术教程,可加入星球学习。
欢迎关注公众号CV技术指南,专注于计算机视觉的技术总结、最新技术跟踪、经典论文解读、CV招聘信息。
【CV技术指南】CV全栈指导班、基础入门班、论文指导班 全面上线!!
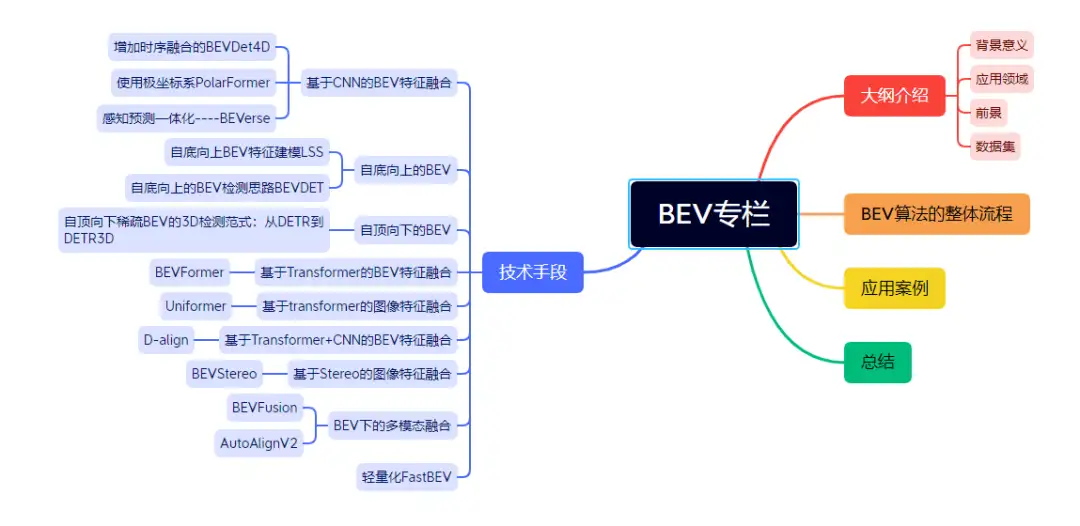
专栏目录如下:
(一) 概述
(二) BEV算法的整体流程
(三)-(五) 基于CNN的BEV特征融合
(六)-(七) 自底向上的BEV
(八) 自顶向下的BEV
(九)-(十三) 引入注意力机制的BEV
(十四) 基于Stereo的BEV
(十五)-(十六) 基于多模态融合的BEV
(十七) 总结
专栏思维导图如下:
希望通过本文的介绍,读者可以对BEV技术有更加全面和深入的了解,为相关领域的研究和应用提供参考和借鉴。
背景与意义
BEV(Bird's Eye View)是指从鸟瞰角度来观察场景,广泛应用于自动驾驶、智能交通等领域。与传统的2D视角相比,BEV视角可以提供更全面、更直观的场景信息,对于车辆的感知和决策具有重要意义。
随着自动驾驶和智能交通技术的发展,对场景感知和决策能力的要求越来越高。传统的2D视角无法完全展现场景的多维信息,而BEV视角可以提供车辆周围360度全方位的视野,并且可以轻松地表示场景中物体的高度和立体空间信息,有利于车辆在复杂环境中精确地感知场景。
BEV感知
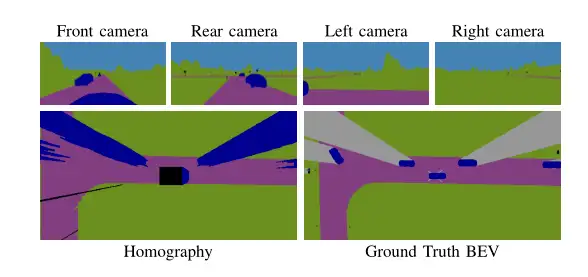
以视觉为中心的BEV感知指的是基于多个视角的图像序列,算法需要将这些透视图转换为BEV特征并进行感知,如输出物体的3D检测框或俯视图下的语义分割。相比于LiDAR,视觉感知的语义信息更丰富,但缺少准确的深度测量。
BEV技术的研究方向包括高精度地图构建、多传感器数据融合、目标检测与跟踪、场景理解与推理、自主决策与规划等方面。
最常见的BEV感知便是3D检测,根据输入数据模态的不同,又可以划分为以下三种:
- 基于图像;
- 基于LiDAR;
- 基于多模态;
另一种常见感知是BEV分割:
- 地图分割;
- 车道线分割;
重点与难点
BEV技术的重点难点包括如何构建高精度的三维地图、如何进行实时的目标检测和跟踪、如何对多模态感知数据进行融合、如何应对极端天气和复杂场景等。
为了解决这些难点,研究人员正在探索一系列的技术方案,包括高精度地图构建、多传感器数据融合、深度学习算法优化等。
- 数据采集与预处理BEV视角需要大量的数据采集和预处理,这对于场景感知的性能和效果具有重要影响。其中,需要解决多摄像头图像融合、数据对齐、畸变矫正等问题。
- 物体检测与跟踪在BEV的加持下,物体检测和跟踪是场景感知的核心任务。需要解决多物体遮挡、尺度变化、形变等问题,以实现准确的物体检测和跟踪。
- 场景重建与建图为了实现精确的场景感知,需要对场景进行重建和建图,以获得场景中物体的位置、姿态、速度等信息。需要解决数据噪声、匹配误差等问题。
应用场景
BEV技术的应用场景非常广泛,包括自动驾驶、智能交通、物流配送、城市规划等领域。在自动驾驶方面,BEV技术可以为车辆提供全方位、高精度的环境感知信息,从而帮助车辆做出更准确的决策。在物流配送方面,BEV技术可以为货车提供全局视角的环境感知信息,从而提高配送效率和安全性。
- 自动驾驶与BEV融合可以提供全方位的场景信息,有利于车辆精确地感知周围的物体和环境,以实现高效、安全的自动驾驶。
- 智能交通BEV视角可以提供更直观、全面的路况信息,有利于实现高效的路况监测和交通管理,以提升城市交通效率和安全性。
- 物流配送与BEV相结合可以提供更准确、全面的货物位置和空间信息,有利于实现高效的物流配送,以提升物流效率和服务质量。
未来发展方向
目前,BEV视角技术在自动驾驶、智能交通、物流配送等领域已经得到了广泛应用,但仍存在许多技术挑战和研究方向,未来的发展方向包括:
- 多传感器融合:目前,BEV视角技术主要使用激光雷达和相机等传感器进行数据采集和处理,但仍需要更多传感器的融合,如毫米波雷达、GPS等,以提高数据的精度和全面性。
- 增强学习算法:BEV技术的应用需要依赖精准的物体检测和跟踪算法,但传统的深度学习算法存在一定局限性,未来可以探索增强学习算法在BEV视角技术中的应用。
- 鲁棒性优化:BEV在复杂环境下的应用面临许多挑战,如天气变化、光照变化、目标遮挡等,未来需要加强算法的鲁棒性优化,以提高系统的稳定性和可靠性。
- 应用拓展:BEV视角技术目前主要应用于自动驾驶、智能交通、物流配送等领域,未来可以进一步拓展应用领域,如农业、矿业等领域,以满足不同领域的需求。
BEV常用的数据集
在BEV中,数据集的构建尤为重要,大规模、高质量的BEV数据集,可以提供高效、准确的场景感知以及辅助算法决策。
当前,已有多个开放数据集可供BEV技术研究使用,如KITTI、nuScenes、Argoverse等。这些数据集涵盖了不同的场景、不同的物体类别和不同的任务,可用于算法研究、模型评价和比较。
评价指标
常用的BEV视角物体检测和跟踪评价指标包括:
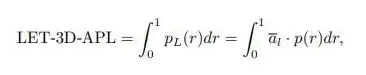
LET-3D-APL:在仅camera的3D检测中,使用LET-3D-APL代替3D-AP作为度量。与三维联合交集(IoU)相比,LET-3D-APL允许预测边界框的纵向定位误差达到给定公差。LET-3D-APL通过使用定位亲和力缩放精度来惩罚纵向定位误差,与3D-AP类似,但给纵向位置一定的容许偏差。数学公式为:
mAP:类似于2D目标检测中的AP度量,但匹配策略被从IoU替换为BEV平面上的2D中心距离。AP是在不同的距离阈值下计算的:0.5米、1米、2米和4米。
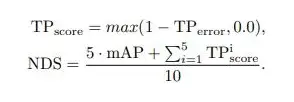
NDS:nuScenes检测分数(NDS)是几个指标的组合:mAP、mATE(平均平移误差)、mASE(平均标度误差)、mAOE(平均方位误差)、mAVE(平均速度误差)和mAAE(平均属性误差)。通过使用上述度量的加权和来计算NDS,mAP的权重为5,其余为1,公式如下:
尾声
通过看完本篇文章,读者朋友们可以明白:
- BEV视角在自动驾驶、智能交通、物流配送等领域的应用和重要性。
- BEV视角技术的重点难点和研究方向,以及关于BEV的基础内容。
- BEV数据集的现状和常用的评价指标。
- BEV的应用场景和发展前景。
总之,BEV技术是一种具有广泛应用前景的新兴感知技术,它将在自动驾驶、智能交通、物流配送、城市规划等领域发挥重要作用。随着技术的不断进步和应用的不断拓展,BEV技术将成为实现智慧城市、智能交通、智能物流等目标的关键技术之一。
也希望通过本文的介绍,读者朋友们能够明白BEV技术的理论和应用,对相关领域的研究以及开发有帮助。
欢迎关注公众号CV技术指南,专注于计算机视觉的技术总结、最新技术跟踪、经典论文解读、CV招聘信息。
【技术文档】《从零搭建pytorch模型教程》122页PDF下载
QQ交流群:470899183。群内有大佬负责解答大家的日常学习、科研、代码问题。
其它文章
一次性分割一切,比SAM更强,华人团队的通用分割模型SEEM来了
CVPR'23|向CLIP学习预训练跨模态!简单高效的零样本参考图像分割方法
CVPR23 Highlight|拥有top-down attention能力的vision transformer
【CV技术指南】咱们自己的CV全栈指导班、基础入门班、论文指导班 全面上线!!
CVPR 2023|21 篇数据集工作汇总(附打包下载链接)
CVPR 2023|两行代码高效缓解视觉Transformer过拟合,美图&国科大联合提出正则化方法DropKey
ViT-Adapter:用于密集预测任务的视觉 Transformer Adapter
CodeGeeX 130亿参数大模型的调优笔记:比FasterTransformer更快的解决方案
CVPR 2023 深挖无标签数据价值!SOLIDER:用于以人为中心的视觉
上线一天,4k star | Facebook:Segment Anything

 浙公网安备 33010602011771号
浙公网安备 33010602011771号