
游戏中战斗伤害范围攻击计算完整全版
2017-03-24修正
在以前版本中有一个错误之处需求修正,当坐标朝向是4,5,6的时候算出来的角度是错误的;导致这个时候攻击怪物的时候矩形,扇形都无法攻击;
现在附录最新修正值
1 case 4: 2 case 5: 3 case 6: 4 case 7: 5 case 8: 6 if (vz > 0) { 7 aTan = -90 - aTan; 8 } else { 9 aTan = 270 - aTan; 10 } 11 break;
算出来的360°角度是错误的;
正确的算法应该是这样的,
1 /** 2 * 根据0-90朝向角度,计算360° 3 * 4 * @param aTan 0 - 90 度 5 * @param vector12 6 * @param vx 7 * @param vz 8 * @return 9 */ 10 public static double getATan360ByaTan(double aTan, int vector12, int vx, int vz) { 11 switch (vector12) { 12 case 0: 13 case 1: 14 case 2: 15 case 3: 16 if (vector12 == 0 && vx < 0) { 17 aTan = 360 - aTan; 18 } else if (vector12 == 3 && vz < 0) { 19 aTan = 90 + aTan; 20 } else { 21 aTan = 90 - aTan; 22 } 23 break; 24 case 4: 25 case 5: 26 case 6: 27 case 7: 28 case 8: 29 if (vx > 0) { 30 aTan = 90 + aTan; 31 } else { 32 aTan = 270 - aTan; 33 } 34 break; 35 case 9: 36 case 10: 37 case 11: 38 if (vz > 0) { 39 aTan = 270 + aTan; 40 } else { 41 aTan = 270 - aTan; 42 } 43 break; 44 } 45 return aTan; 46 }
s
前瞻回顾
上一篇文章中《游戏里12方向,任意方向计算正前方矩形规则》中讲到,游戏12方向任意矩形规则计算问题,
在后来测试发现这个算法其实有问题,因为算错矩形的时候ABCD,矩形四个坐标点必须是顺序坐标点,才能计算出任意点位
是否在坐标中;如果方向变化,后坐标点其实位置就错误了,验证是否在矩形方案就错了;
后来在网友帮助下,用射线算法,解决多边形问(本方案只能适用于凸多边形计算),坐标点是否在多边形内,不限于四边形。
伤害范围划分
在我做的游戏中,出现的计算伤害范围方式分为
圆形,矩形(正方向或者长方形),三角形,扇形,
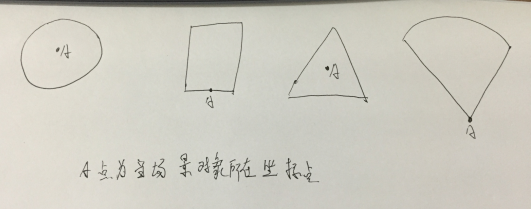
当前图中所有A点(中心点或者场景对象坐标点)位当前需要计算的伤害范围起始点或者叫中心点,
伤害范围圆形
我相信圆形其实是做好计算的,那就是说只需要判断两个点位距离即可;

1 /** 2 * 计算两点距离 3 * 4 * @param x1 5 * @param z1 6 * @param x2 7 * @param z2 8 * @return 9 */ 10 public static double distance(double x1, double z1, double x2, double z2) { 11 x1 -= x2; 12 z1 -= z2; 13 return Math.sqrt(x1 * x1 + z1 * z1); 14 }
圆形计算方式,最为简单,连方向都不需要计算,
游戏中360度方向计算
我们需要一个类Vector表示当前攻击朝向


1 package net.sz.game.engine.struct; 2 3 import java.io.Serializable; 4 import org.apache.log4j.Logger; 5 6 /** 7 * 表示朝向,位移量 8 * <br> 9 * author 失足程序员<br> 10 * mail 492794628@qq.com<br> 11 * phone 13882122019<br> 12 */ 13 public class Vector implements Serializable { 14 15 private static final Logger log = Logger.getLogger(Vector.class); 16 private static final long serialVersionUID = -8252572890329345857L; 17 18 /*表示当前朝向修正值 0 - 11 包含*/ 19 private int dir; 20 /*表示未修正的x方向正负位移量 只能是1或者-1*/ 21 private int dir_x; 22 /*表示未修正的y方向正负位移量 只能是1或者-1*/ 23 private int dir_y; 24 /*表示未修正的z方向正负位移量 只能是1或者-1*/ 25 private int dir_z; 26 /*在x轴方向位移 偏移量 >=0 */ 27 @Deprecated 28 private double vrx; 29 /*在z轴方向的位移 偏移量 >=0*/ 30 @Deprecated 31 private double vrz; 32 /*角 a 度数 0 - 90 包含*/ 33 private double atan; 34 /*角 a 度数 0 ~ 360° 不包含 360*/ 35 private double atan360; 36 37 public Vector() { 38 } 39 40 public Vector(Vector vector) { 41 this.dir = vector.dir; 42 this.dir_x = vector.dir_x; 43 this.dir_y = vector.dir_y; 44 this.dir_z = vector.dir_z; 45 this.atan = vector.atan; 46 this.atan360 = vector.atan360; 47 this.vrx = vector.vrx; 48 this.vrz = vector.vrz; 49 } 50 51 public void copyVector(Vector vector) { 52 this.dir = vector.dir; 53 this.dir_x = vector.dir_x; 54 this.dir_y = vector.dir_y; 55 this.dir_z = vector.dir_z; 56 this.atan = vector.atan; 57 this.atan360 = vector.atan360; 58 this.vrx = vector.vrx; 59 this.vrz = vector.vrz; 60 } 61 62 public int getDir() { 63 return dir; 64 } 65 66 public void setDir(int dir) { 67 this.dir = dir; 68 } 69 70 public int getDir_x() { 71 return dir_x; 72 } 73 74 public void setDir_x(int dir_x) { 75 this.dir_x = dir_x; 76 } 77 78 public int getDir_y() { 79 return dir_y; 80 } 81 82 public void setDir_y(int dir_y) { 83 this.dir_y = dir_y; 84 } 85 86 public int getDir_z() { 87 return dir_z; 88 } 89 90 public void setDir_z(int dir_z) { 91 this.dir_z = dir_z; 92 } 93 94 public double getAtan() { 95 return atan; 96 } 97 98 public void setAtan(double atan) { 99 this.atan = atan; 100 } 101 102 public double getAtan360() { 103 return atan360; 104 } 105 106 public void setAtan360(double atan360) { 107 this.atan360 = atan360; 108 } 109 110 @Deprecated 111 public double getVrx() { 112 return vrx; 113 } 114 115 @Deprecated 116 public void setVrx(double vrx) { 117 this.vrx = vrx; 118 } 119 120 @Deprecated 121 public double getVrz() { 122 return vrz; 123 } 124 125 @Deprecated 126 public void setVrz(double vrz) { 127 this.vrz = vrz; 128 } 129 130 @Override 131 public String toString() { 132 return "dir=" + dir + ", dir_x=" + dir_x + ", dir_z=" + dir_z + ", atan=" + atan + ", atan360=" + atan360; 133 } 134 135 }
然后如何获得朝向?
1,通过连个坐标点获得朝向问题
比如获取攻击对象锁定目标的释放技能,或者给定坐标点比如地面魔法施法类型
1 /** 2 * 获取两个坐标点的朝向 3 * 4 * @param x1 5 * @param z1 6 * @param x2 7 * @param z2 8 * @return 9 */ 10 public static Vector getV12Vector(double x1, double z1, double x2, double z2) { 11 Vector vector = new Vector(); 12 getV12Vector(vector, x1, z1, x2, z2); 13 return vector; 14 } 15 16 /** 17 * 获取两个坐标点的朝向 18 * 19 * @param vector 20 * @param x1 21 * @param z1 22 * @param x2 23 * @param z2 24 */ 25 public static void getV12Vector(Vector vector, double x1, double z1, double x2, double z2) { 26 vector.setAtan(getATan(x1, z1, x2, z2)); 27 vector.setDir(_getVector12(vector.getAtan(), x1, z1, x2, z2)); 28 vector.setDir_x(getVector12_x(x1, x2)); 29 vector.setDir_z(getVector12_z(z1, z2)); 30 vector.setAtan360(getATan360ByaTan(vector.getAtan(), vector.getDir(), vector.getDir_x(), vector.getDir_z())); 31 } 32 33 /** 34 * 获取两个坐标点的朝向 35 * 36 * @param x1 37 * @param z1 38 * @param x2 39 * @param z2 40 * @return 41 */ 42 public static double getATan360(double x1, double z1, double x2, double z2) { 43 double aTan = getATan(x1, z1, x2, z2); 44 byte _getVector12 = _getVector12(aTan, x1, z1, x2, z2); 45 byte vector12_x = getVector12_x(x1, x2); 46 byte vector12_z = getVector12_z(z1, z2); 47 return getATan360ByaTan(aTan, _getVector12, vector12_x, vector12_z); 48 } 49 50 /** 51 * 朝向是有修正,在修正下真实朝向,有正负区分 52 * 53 * @param z1 54 * @param z2 55 * @return 56 */ 57 static public byte getVector12_z(double z1, double z2) { 58 byte vector = 1; 59 if (z1 > z2) { 60 /*表示z方向递减*/ 61 vector = -1; 62 } 63 return vector; 64 } 65 66 /** 67 * 朝向是有修正,在修正下真实朝向,有正负区分 68 * 69 * @param x1 70 * @param x2 71 * @return 72 */ 73 static public byte getVector12_x(double x1, double x2) { 74 byte vector = 1; 75 if (x1 > x2) { 76 /*表示x方向递减*/ 77 vector = -1; 78 } 79 return vector; 80 } 81 82 // <editor-fold defaultstate="collapsed" desc="位移是z轴 static float getV12Z(int vector, double offset)"> 83 public static double getV12ZD(double offset, double sin) { 84 offset = Math.abs(offset); 85 /* 三角函数计算器 */ 86 double sinr = (offset * Math.sin(Math.toRadians(sin))); 87 /* 拿到保留4位小数计算器 */ 88 return BitUtil.getDouble4(sinr); 89 } 90 // </editor-fold> 91 92 // <editor-fold defaultstate="collapsed" desc="位移时的X轴 static float getV12X(int vector, double offset)"> 93 public static double getV12XD(double offset, double cos) { 94 offset = Math.abs(offset); 95 /* 三角函数计算器 */ 96 double cosr = (offset * Math.cos(Math.toRadians(cos))); 97 /* 拿到保留4位小数计算器 */ 98 return BitUtil.getDouble4(cosr); 99 } 100 // </editor-fold>. 101 102 //<editor-fold defaultstate="collapsed" desc="获取角度 public static int getV12ATan(double x1, double y1, double x2, double y2)"> 103 public static double getATan(double x1, double z1, double x2, double z2) { 104 //正切(tan)等于对边比邻边;tanA=a/b 105 double a = 0; 106 if (x1 == x2) { 107 //x坐标相同的情况表示正上或者正下方移动 108 a = 90; 109 } else if (z1 != z2) { 110 //三角函数的角度计算 111 double ta = Math.abs(z1 - z2) / Math.abs(x1 - x2); 112 double atan = Math.atan(ta); 113 a = BitUtil.getDouble4(Math.toDegrees(atan)); 114 } 115 return a; 116 } 117 //</editor-fold>
2,通过360度朝向计算坐标点问题;
通过360°朝向是因为比如场景中的陷阱,炮塔之类的,默认配置初始朝向,可能不在改变朝向
在计算360朝向的时候,我们游戏是和客户端u3d,模拟方式,在z轴正方向为360°起始点方向
然后划分12方向;
1 /** 2 * 3 * @param atan360 4 * @return 5 */ 6 public static Vector getVectorBy360Atan(double atan360) { 7 Vector vector = new Vector(); 8 vector.setAtan360(atan360); 9 setAtan360(vector); 10 return vector; 11 } 12 13 /** 14 * 根据360度算出各种朝向问题 15 * 16 * @param vector 17 */ 18 public static void setAtan360(Vector vector) { 19 double atan360 = vector.getAtan360(); 20 if (0 <= atan360 && atan360 <= 15) { 21 vector.setDir(0); 22 vector.setDir_x(1); 23 vector.setDir_z(1); 24 vector.setAtan(90 - atan360); 25 } else if (15 < atan360 && atan360 <= 45) { 26 vector.setDir(1); 27 vector.setDir_x(1); 28 vector.setDir_z(1); 29 vector.setAtan(90 - atan360); 30 } else if (45 < atan360 && atan360 <= 75) { 31 vector.setDir(2); 32 vector.setDir_x(1); 33 vector.setDir_z(1); 34 vector.setAtan(90 - atan360); 35 } else if (75 < atan360 && atan360 <= 90) { 36 vector.setDir(3); 37 vector.setDir_x(1); 38 vector.setDir_z(1); 39 vector.setAtan(90 - atan360); 40 } else if (90 < atan360 && atan360 <= 105) { 41 vector.setDir(3); 42 vector.setDir_x(1); 43 vector.setDir_z(-1); 44 vector.setAtan(atan360 - 90); 45 } else if (105 < atan360 && atan360 <= 135) { 46 vector.setDir(4); 47 vector.setDir_x(1); 48 vector.setDir_z(-1); 49 vector.setAtan(atan360 - 90); 50 } else if (135 < atan360 && atan360 <= 165) { 51 vector.setDir(5); 52 vector.setDir_x(1); 53 vector.setDir_z(-1); 54 vector.setAtan(atan360 - 90); 55 } else if (165 < atan360 && atan360 <= 180) { 56 vector.setDir(6); 57 vector.setDir_x(1); 58 vector.setDir_z(-1); 59 vector.setAtan(atan360 - 90); 60 } else if (180 < atan360 && atan360 <= 195) { 61 vector.setDir(6); 62 vector.setDir_x(-1); 63 vector.setDir_z(-1); 64 vector.setAtan(270 - atan360); 65 } else if (195 < atan360 && atan360 <= 225) { 66 vector.setDir(7); 67 vector.setDir_x(-1); 68 vector.setDir_z(-1); 69 vector.setAtan(270 - atan360); 70 } else if (225 < atan360 && atan360 <= 255) { 71 vector.setDir(8); 72 vector.setDir_x(-1); 73 vector.setDir_z(-1); 74 vector.setAtan(270 - atan360); 75 } else if (255 < atan360 && atan360 <= 270) { 76 vector.setDir(9); 77 vector.setDir_x(-1); 78 vector.setDir_z(1); 79 vector.setAtan(270 - atan360); 80 } else if (270 < atan360 && atan360 <= 285) { 81 vector.setDir(9); 82 vector.setDir_x(-1); 83 vector.setDir_z(1); 84 vector.setAtan(atan360 - 270); 85 } else if (285 < atan360 && atan360 <= 315) { 86 vector.setDir(10); 87 vector.setDir_x(-1); 88 vector.setDir_z(1); 89 vector.setAtan(atan360 - 270); 90 } else if (315 < atan360 && atan360 <= 345) { 91 vector.setDir(11); 92 vector.setDir_x(-1); 93 vector.setDir_z(1); 94 vector.setAtan(atan360 - 270); 95 } else if (345 < atan360) { 96 vector.setDir(0); 97 vector.setDir_x(-1); 98 vector.setDir_z(1); 99 vector.setAtan(atan360 - 270); 100 } 101 }
以上两种方式获得攻击朝向以后方便接下来的计算
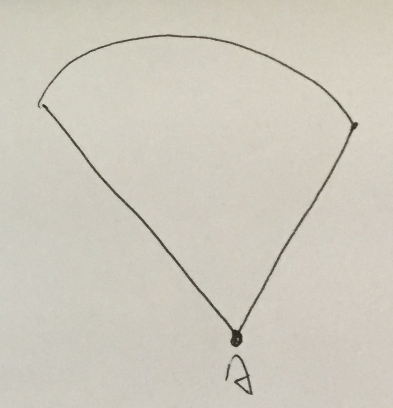
伤害范围扇形
扇形伤害计算范围,我们需要计算当前攻击朝向,扇形夹角度,和半径范围
在处理扇形之前,我们需要获得方向,在之前的代码里面我们已经知道如果去当前中心点朝向性问题后,
计算扇形范围,
其实起算扇形范围用360°朝向是非常好算,首先计算扇形的两个边360°表现形式的角度,然后计算在
A到任意坐标点距离以及点和点之前的360°夹角换算就知道是否在扇形攻击范围内了;
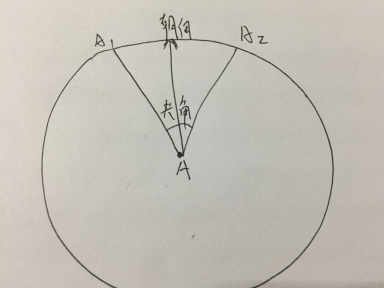
通过当前朝向的360°角度往左(A1)和往右(A2)偏移夹角度得到扇形夹角,两边的360°表象;
如果往左(A1)偏移出来的值大于往右(A2)偏移出来的扇形边360°的值,
那么任意点位的朝向360°(C点表示) (A1<= C && C<=360) || (0<=C && C<=A2)
否则是正常状态
A2<=C && C<=A1
1 private static final Logger log = Logger.getLogger(ATest.class); 2 3 public static void main(String[] args) { 4 5 /*攻击方坐标点是 2,2 被攻击 6,7*/ 6 Vector vector = MoveUtil.getV12Vector(2, 2, 6, 7); 7 log.error(vector); 8 /*扇形半径为5码*/ 9 double vr = 5; 10 /*我们当前扇形是70°攻击范围*/ 11 double skillAngle = 35; 12 /*有角度 为扇形*/ 13 double atan360 = vector.getAtan360(); 14 /*往左偏移 A1*/ 15 double aTan360_A1 = MoveUtil.getATan360(atan360, -1 * skillAngle); 16 /*往右偏移 A2*/ 17 double aTan360_A2 = MoveUtil.getATan360(atan360, skillAngle); 18 /*求证 5,5 点位是否在矩形内*/ 19 if (MoveUtil.distance(2, 2, 5, 5) <= vr) { 20 double tmpTan360 = MoveUtil.getATan360(2, 2, 5, 5); 21 log.error("当前点位(5, 5)在扇形内 360°=" + tmpTan360); 22 if ((aTan360_A1 > aTan360_A2 && ((aTan360_A1 <= tmpTan360 && tmpTan360 <= 360) || (0 <= tmpTan360 && tmpTan360 <= aTan360_A2))) 23 || (aTan360_A1 < aTan360_A2 && aTan360_A1 <= tmpTan360 && tmpTan360 <= aTan360_A2)) { 24 /*"修正后的夹角:" + aTan360_A1 + " ~ 360 和 0 ~" + aTan360_A2*/ 25 log.error("当前点位(5, 5)在扇形 内"); 26 } else { 27 log.error("当前点位(5, 5)在扇形 外"); 28 } 29 } 30 31 /*求证 1,1 点位是否在矩形内*/ 32 if (MoveUtil.distance(2, 2, 1, 1) <= vr) { 33 double tmpTan360 = MoveUtil.getATan360(2, 2, 1, 1); 34 log.error("当前点位(1, 1)在扇形内 360°=" + tmpTan360); 35 if ((aTan360_A1 > aTan360_A2 && ((aTan360_A1 <= tmpTan360 && tmpTan360 <= 360) || (0 <= tmpTan360 && tmpTan360 <= aTan360_A2))) 36 || (aTan360_A1 < aTan360_A2 && aTan360_A1 <= tmpTan360 && tmpTan360 <= aTan360_A2)) { 37 /*"修正后的夹角:" + aTan360_A1 + " ~ 360 和 0 ~" + aTan360_A2*/ 38 log.error("当前点位(1, 1)在扇形 内"); 39 } else { 40 log.error("当前点位(1, 1)在扇形 外"); 41 } 42 } 43 }
测试结果:
1 --- exec-maven-plugin:1.2.1:exec (default-cli) @ net.sz.game.engine --- 2 [02-15 20:07:53:0101:ERROR: sz.ATest.main():19 ] -> dir=1, dir_x=1, dir_z=1, atan=51.3402, atan360=38.6598 3 [02-15 20:07:53:0105:ERROR: sz.ATest.main():33 ] -> 当前点位(5, 5)在扇形内 360°=45.0 4 [02-15 20:07:53:0105:ERROR: sz.ATest.main():37 ] -> 当前点位(5, 5)在扇形 内 5 [02-15 20:07:53:0106:ERROR: sz.ATest.main():46 ] -> 当前点位(1, 1)在扇形内 360°=225.0 6 [02-15 20:07:53:0106:ERROR: sz.ATest.main():52 ] -> 当前点位(1, 1)在扇形 外 7 ------------------------------------------------------------------------
伤害范围多边形
多边形分为,三角形,矩形,五边形,六边形;
由于五边形及以上多边形其实和圆形区别不大,我没有细化;目前只处理了三角形和矩形
矩形辅助代码
1 package net.sz.game.engine.struct; 2 3 import net.sz.game.engine.utils.BitUtil; 4 5 /** 6 * 任意多边形, 7 * 8 */ 9 public class PolygonCheck { 10 11 12 /*多边形的顶点*/ 13 double[] pointXs; 14 double[] pointZs; 15 /*当前已经添加的坐标点*/ 16 int pointCount = 0; 17 18 /** 19 * 20 * @param size 多边形的顶点数 21 */ 22 public PolygonCheck(int size) { 23 pointXs = new double[size]; 24 pointZs = new double[size]; 25 } 26 27 /** 28 * 29 * @param x 坐标点 30 * @param z 坐标点 31 */ 32 public void add(double x, double z) { 33 add(pointCount, x, z); 34 pointCount++; 35 } 36 37 /** 38 * 39 * @param index 当前索引 40 * @param x 坐标点 41 * @param z 坐标点 42 */ 43 public void add(int index, double x, double z) { 44 if (0 <= index && index < pointXs.length) { 45 pointXs[index] = BitUtil.getDouble2(x); 46 pointZs[index] = BitUtil.getDouble2(z); 47 } else { 48 throw new UnsupportedOperationException("index out of"); 49 } 50 } 51 52 /** 53 * 判断点是否在多边形内 <br> 54 * ----------原理---------- <br> 55 * 注意到如果从P作水平向左的射线的话,如果P在多边形内部,那么这条射线与多边形的交点必为奇数,<br> 56 * 如果P在多边形外部,则交点个数必为偶数(0也在内)。<br> 57 * 58 * @param x 要判断的点 59 * @param z 要判断的点 60 * @return 61 */ 62 public boolean isInPolygon(double x, double z) { 63 boolean inside = false; 64 double p1x = 0, p1z = 0, p2x = 0, p2z = 0; 65 66 for (int i = 0, j = pointCount - 1; i < pointCount; j = i, i++) { 67 /*第一个点和最后一个点作为第一条线,之后是第一个点和第二个点作为第二条线,之后是第二个点与第三个点,第三个点与第四个点...*/ 68 p1x = pointXs[i]; 69 p1z = pointZs[i]; 70 71 p2x = pointXs[j]; 72 p2z = pointZs[j]; 73 74 if (z < p2z) {/*p2在射线之上*/ 75 if (p1z <= z) {/*p1正好在射线中或者射线下方*/ 76 if ((z - p1z) * (p2x - p1x) >= (x - p1x) * (p2z - p1z))/*斜率判断,在P1和P2之间且在P1P2右侧*/ { 77 /*射线与多边形交点为奇数时则在多边形之内,若为偶数个交点时则在多边形之外。 78 由于inside初始值为false,即交点数为零。所以当有第一个交点时,则必为奇数,则在内部,此时为inside=(!inside) 79 所以当有第二个交点时,则必为偶数,则在外部,此时为inside=(!inside)*/ 80 inside = (!inside); 81 } 82 } 83 } else if (z < p1z) { 84 /*p2正好在射线中或者在射线下方,p1在射线上*/ 85 if ((z - p1z) * (p2x - p1x) <= (x - p1x) * (p2z - p1z))/*斜率判断,在P1和P2之间且在P1P2右侧*/ { 86 inside = (!inside); 87 } 88 } 89 } 90 return inside; 91 } 92 }
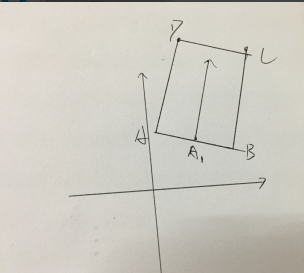
矩形,重要的是,根据A1,当前坐标点为AB边中心点,延伸A点和B
也就是说A1360°朝向向左偏移90°,位移AB边一半距离位A点,向右偏移90°位移AB边一半距离为B点
A点和A1当前朝向位移AD边距离得到D点,
B点和A1当前朝向位移AD边距离得到C点,
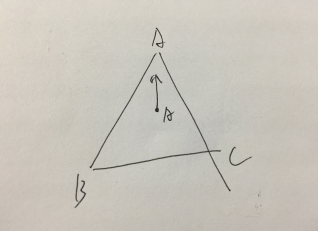
三角形是以当前坐标点A点的朝向正前方为三角形A点,偏移120°和240°;
相当于是等角三角形等边三角形;
1 // <editor-fold defaultstate="collapsed" desc="当前坐标点位中心点的等角(等边)三角形,当前朝向位A点顶点延伸 static public PolygonCheck getTriangle(Vector vector, double x, double z, double vr)"> 2 /** 3 * 当前坐标点位中心点的等角(等边)三角形,当前朝向位A点顶点延伸 4 * 5 * @param vector 6 * @param x 7 * @param z 8 * @param vr 中心点偏移位置 9 * @param vr_width 三角形,中心点距离顶点距离 10 * @return 11 */ 12 static public PolygonCheck getTriangle(Vector vector, double x, double z, double vr, double vr_width) { 13 14 if (vr != 0) { 15 /* 根据三角函数计算出 中心点 偏移量 */ 16 double v12_V_X = 0; 17 double v12_V_Y = 0; 18 if (vr < 0) { 19 /* 传入负数的时候方向刚好是相反方向运动 */ 20 v12_V_X = -1 * vector.getDir_x() * getV12XD(vr, vector.getAtan()); 21 v12_V_Y = -1 * vector.getDir_z() * getV12ZD(vr, vector.getAtan()); 22 } else { 23 /* 正前方移动 */ 24 v12_V_X = vector.getDir_x() * getV12XD(vr, vector.getAtan()); 25 v12_V_Y = vector.getDir_z() * getV12ZD(vr, vector.getAtan()); 26 } 27 x += v12_V_X; 28 z += v12_V_Y; 29 } 30 31 Vector bVector = getVectorBy360Atan(getATan360(vector.getAtan360(), 120)); 32 Vector cVector = getVectorBy360Atan(getATan360(vector.getAtan360(), 240)); 33 34 double ax = x + (vector.getDir_x() * getV12XD(vr, vector.getAtan())); 35 double az = z + (vector.getDir_z() * getV12ZD(vr, vector.getAtan())); 36 37 double bx = x + (bVector.getDir_x() * getV12XD(vr, bVector.getAtan())); 38 double bz = z + (bVector.getDir_z() * getV12ZD(vr, bVector.getAtan())); 39 40 double cx = x + (cVector.getDir_x() * getV12XD(vr, cVector.getAtan())); 41 double cz = z + (cVector.getDir_z() * getV12ZD(vr, cVector.getAtan())); 42 43 PolygonCheck polygonCheck = new PolygonCheck(3); 44 polygonCheck.add(ax, az); 45 polygonCheck.add(bx, bz); 46 polygonCheck.add(cx, cz); 47 if (log.isDebugEnabled()) { 48 log.debug("A_X:" + ax + " A_Y:" + az); 49 log.debug("B_X:" + bx + " B_Y:" + bz); 50 log.debug("C_X:" + cx + " C_Y:" + cz); 51 } 52 return polygonCheck; 53 } 54 // </editor-fold> 55 56 // <editor-fold defaultstate="collapsed" desc="90°朝向矩形,以传入的坐标点为AB边中心点距离 static public PolygonCheck getRectangle(Vector vector, double x, double y, double vr, double vr_width, double vr_hight)"> 57 /** 58 * 90°朝向矩形,以传入的坐标点为AB边中心点距离 59 * 60 * @param vector 当前朝向 61 * @param x 当前坐标点 62 * @param z 当前坐标点 63 * @param vr 原点偏移量,AB编中心点90°偏移量 偏移,正前方(正数)或者正后方(负数)米数 64 * @param vr_width 偏移量,矩形的宽度,左右各偏移0.2m直线是0.4m 65 * @param vr_hight 偏移量高,矩形的长度 66 * @return 67 */ 68 static public PolygonCheck getRectangle(Vector vector, double x, double z, double vr, double vr_width, double vr_hight) { 69 //宽度修正 70 vr_width = vr_width / 2; 71 72 Vector aVector = getVectorBy360Atan(getATan360(vector.getAtan360(), -90)); 73 Vector bVector = getVectorBy360Atan(getATan360(vector.getAtan360(), 90)); 74 75 if (vr != 0) { 76 /* 根据三角函数计算出 中心点 偏移量 */ 77 double v12_V_X = 0; 78 double v12_V_Y = 0; 79 if (vr < 0) { 80 /* 传入负数的时候方向刚好是相反方向运动 */ 81 v12_V_X = -1 * vector.getDir_x() * getV12XD(vr, vector.getAtan()); 82 v12_V_Y = -1 * vector.getDir_z() * getV12ZD(vr, vector.getAtan()); 83 } else { 84 /* 正前方移动 */ 85 v12_V_X = vector.getDir_x() * getV12XD(vr, vector.getAtan()); 86 v12_V_Y = vector.getDir_z() * getV12ZD(vr, vector.getAtan()); 87 } 88 x += v12_V_X; 89 z += v12_V_Y; 90 } 91 92 /* 根据三角函数计算出 A 点偏移量 */ 93 double v12_A_X = aVector.getDir_x() * getV12XD(vr_width, aVector.getAtan()); 94 double v12_A_Y = aVector.getDir_z() * getV12ZD(vr_width, aVector.getAtan()); 95 /* 由于在计算12方向位移函数里面已经计算偏移量是正负值 */ 96 double A_X = x + v12_A_X; 97 double A_Y = z + v12_A_Y; 98 99 /* 根据三角函数计算出 B 点偏移量 */ 100 double v12_B_X = bVector.getDir_x() * getV12XD(vr_width, bVector.getAtan()); 101 double v12_B_Y = bVector.getDir_z() * getV12ZD(vr_width, bVector.getAtan()); 102 /* 由于在计算12方向位移函数里面已经计算偏移量是正负值 */ 103 double B_X = x + v12_B_X; 104 double B_Y = z + v12_B_Y; 105 106 /* 根据三角函数计算出 C 或者 D 点偏移量 */ 107 double v12_CD_X = vector.getDir_x() * getV12XD(vr_hight, vector.getAtan()); 108 double v12_CD_Y = vector.getDir_z() * getV12ZD(vr_hight, vector.getAtan()); 109 110 /* C 点应该是 B 点的垂直方向也就是原来玩家的移动方向 由于在计算12方向位移函数里面已经计算偏移量是正负值*/ 111 double C_X = B_X + v12_CD_X; 112 double C_Y = B_Y + v12_CD_Y; 113 /* D 点应该是 A 点的垂直方向也就是原来玩家的移动方向 由于在计算12方向位移函数里面已经计算偏移量是正负值*/ 114 double D_X = A_X + v12_CD_X; 115 double D_Y = A_Y + v12_CD_Y; 116 117 PolygonCheck polygonCheck = new PolygonCheck(4); 118 polygonCheck.add(A_X, A_Y); 119 polygonCheck.add(B_X, B_Y); 120 polygonCheck.add(C_X, C_Y); 121 polygonCheck.add(D_X, D_Y); 122 if (log.isDebugEnabled()) { 123 log.debug("A_X:" + A_X + " A_Y:" + A_Y); 124 log.debug("B_X:" + B_X + " B_Y:" + B_Y); 125 log.debug("C_X:" + C_X + " C_Y:" + C_Y); 126 log.debug("D_X:" + D_X + " D_Y:" + D_Y); 127 } 128 return polygonCheck; 129 } 130 //</editor-fold> 131 132 public static void main(String[] args) { 133 double x1 = 20, z1 = 20, x2 = 20, z2 = 10; 134 Vector v12Vector = getV12Vector(x1, z1, x2, z2); 135 136 log.error("当前朝向:" + v12Vector); 137 138 // double v12X = v12Vector.getDir_x() * getV12X(1d, v12Vector.getAtan()); 139 // log.error("当前位移量-x:" + v12X); 140 // double v12Z = v12Vector.getDir_z() * getV12Z(1d, v12Vector.getAtan()); 141 // log.error("当前位移量-y:" + v12Z); 142 // double aTan = getATan360(v12Vector.getAtan360(), -10); 143 // log.error("修正后的角度:" + aTan); 144 // double aTanDir = getATan360(v12Vector.getAtan360(), 10); 145 // log.error("修正后的角度:" + aTanDir); 146 // 147 // if (aTan > aTanDir) { 148 // log.error("修正后的夹角:" + aTan + " ~ 360 和 0 ~" + aTanDir); 149 // } else { 150 // log.error("修正后的夹角:" + aTan + " ~ " + aTanDir); 151 // } 152 // aTan = getATan360(aTan, -10); 153 // log.error("修正后的角度:" + aTan); 154 // aTanDir = getATan360(aTanDir, -10); 155 // log.error("修正后的角度:" + aTanDir); 156 // 157 // if (aTan > aTanDir) { 158 // log.error("修正后的夹角:" + aTan + " ~ 360 和 0 ~" + aTanDir); 159 // } else { 160 // log.error("修正后的夹角:" + aTan + " ~ " + aTanDir); 161 // } 162 PolygonCheck rectangle = getTriangle(v12Vector, x1, z1, 0, 4); 163 164 log.error("三角形:" + rectangle.isInPolygon(19, 19)); 165 166 }
测试结果
1 --- exec-maven-plugin:1.2.1:exec (default-cli) @ net.sz.game.engine --- 2 [02-15 20:33:34:0522:ERROR: utils.MoveUtil.main():678] -> 当前朝向:dir=6, dir_x=1, dir_z=-1, atan=90.0, atan360=180.0 3 [02-15 20:33:34:0525:DEBUG: utils.MoveUtil.getTriangle():590] -> A_X:20.0 A_Y:20.0 4 [02-15 20:33:34:0526:DEBUG: utils.MoveUtil.getTriangle():591] -> B_X:20.0 B_Y:20.0 5 [02-15 20:33:34:0526:DEBUG: utils.MoveUtil.getTriangle():592] -> C_X:20.0 C_Y:20.0 6 [02-15 20:33:34:0526:ERROR: utils.MoveUtil.main():706] -> 三角形:false 7 ------------------------------------------------------------------------
以上是在攻击伤害范围攻击计算公式;
该公式还夹杂着算偏移量,比如神龙boos(摆尾技能)攻击的是boos朝向的正后方,一个扇形范围;
总要的是提供一种思路已经解决访问,
此次思路最总要的地方在于我们任何方向表示都采用360°圆形无死角计算,提供的精确度是小数的后4位算法;
在攻击场景对象的时候,就可以做到像MOBa游戏一样的进准度测试
伤害范围弹道飞行
本处只提供解决方案而不提供解决代码;
仅供参考
思路方案是根据弹道飞行速度,计算间隔时间执行比如50ms飞行距离;
我们以扇形为例:
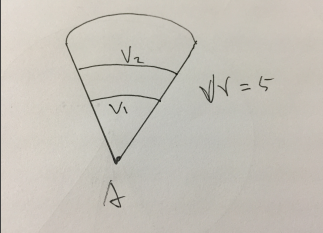
我们得到一个扇形V;扇形的半径是VR=5
然后我们从A点开始计算,每50ms计算一次飞行距离;
第一次飞行我们得到V1然后计算V1里面可攻击对象,坐标点半径小于V1,
第二次飞行,间隔50ms以后,我们计算出V2,那么这时候,
我们需要计算可攻击的对象的距离是大于V1半径小于V2半径位置;
这样就能得到弹道飞行中获取可攻击对象的伤害计算方式;
矩形其实同理计算的;
跪求保留标示符 /** * @author: Troy.Chen(失足程序员, 15388152619) * @version: 2021-07-20 10:55 **/ C#版本代码 vs2010及以上工具可以 java 开发工具是netbeans 和 idea 版本,只有项目导入如果出现异常,请根据自己的工具调整 提供免费仓储。 最新的代码地址:↓↓↓ https://gitee.com/wuxindao 觉得我还可以,打赏一下吧,你的肯定是我努力的最大动力


 浙公网安备 33010602011771号
浙公网安备 33010602011771号