计算机组成原理——原理篇 IO(上)
总线
降低复杂性:总线的设计思路来源
计算机里其实有很多不同的硬件设备,除了 CPU 和内存之外,我们还有大量的输入输出设备。可以说,你计算机上的每一个接口,键盘、鼠标、显示器、硬盘,乃至通过 USB 接口连接的各种外部设备,都对应了一个设备或者模块。
如果各个设备间的通信,都是互相之间单独进行的。如果我们有 N 个不同的设备,他们之间需要各自单独连接,那么系统复杂度就会变成 N^2。每一个设备或者功能电路模块,都要和其他 N−1 个设备去通信。为了简化系统的复杂度,我们就引入了总线,把这个 N^2 的复杂度,变成一个 N 的复杂度。
那怎么降低复杂度呢?与其让各个设备之间互相单独通信,不如我们去设计一个公用的线路。CPU 想要和什么设备通信,通信的指令是什么,对应的数据是什么,都发送到这个线路上;设备要向 CPU 发送什么信息呢,也发送到这个线路上。这个线路就好像一个高速公路,各个设备和其他设备之间,不需要单独建公路,只建一条小路通向这条高速公路就好了。

这个设计思路,就是我们今天要说的总线(Bus)。
总线,其实就是一组线路。我们的 CPU、内存以及输入和输出设备,都是通过这组线路,进行相互间通信的。总线的英文叫作 Bus,就是一辆公交车。这个名字很好地描述了总线的含义。我们的“公交车”的各个站点,就是各个接入设备。要想向一个设备传输数据,我们只要把数据放上公交车,在对应的车站下车就可以了。
其实,对应的设计思路,在软件开发中也是非常常见的。我们在做大型系统开发的过程中,经常会用到一种叫作事件总线(Event Bus)的设计模式。
进行大规模应用系统开发的时候,系统中的各个组件之间也需要相互通信。模块之间如果是两两之间单独去定义协议,这个软件系统一样会遇到一个复杂度变成了 N^2 的问题。所以常见的一个解决方案,就是事件总线这个设计模式。
在事件总线这个设计模式里,各个模块触发对应的事件,并把事件对象发送到总线上。也就是说,每个模块都是一个发布者(Publisher)。而各个模块也会把自己注册到总线上,去监听总线上的事件,并根据事件的对象类型或者是对象内容,来决定自己是否要进行特定的处理或者响应。
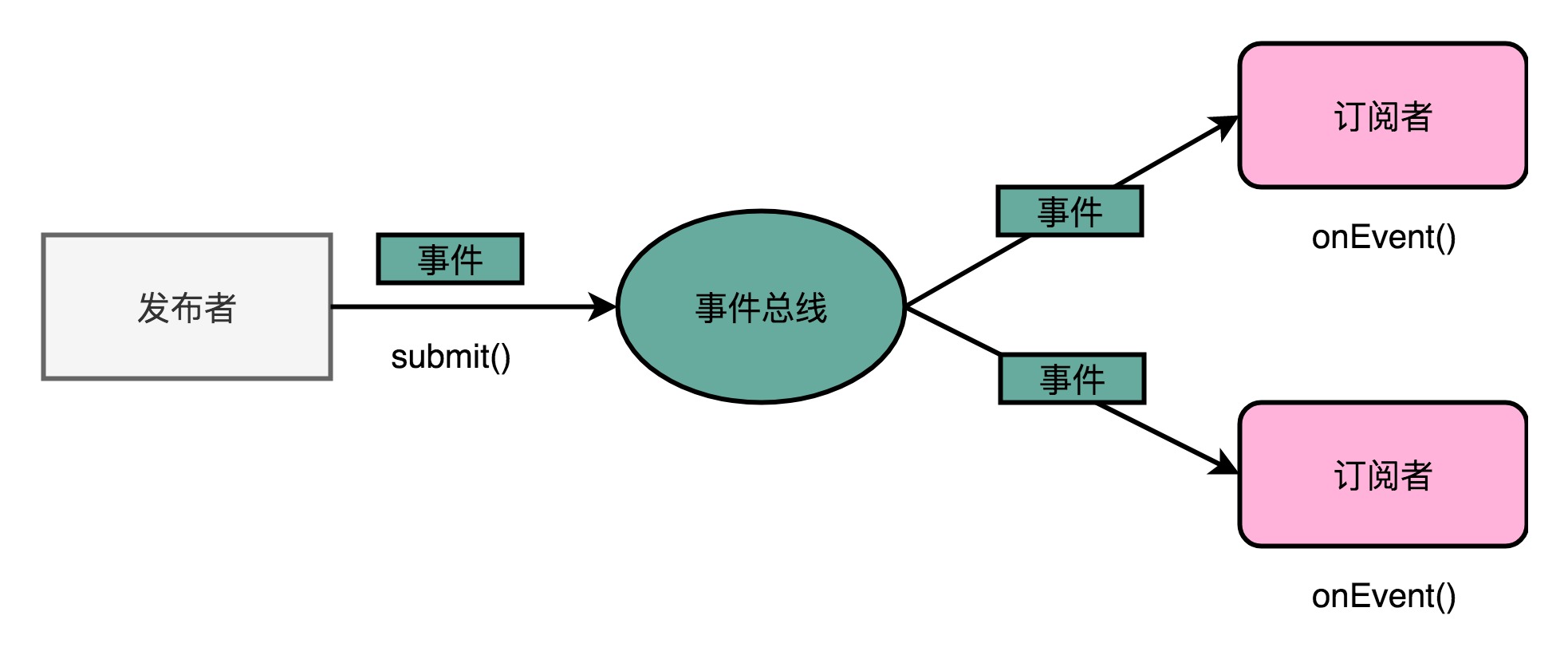
这样的设计下,注册在总线上的各个模块就是松耦合的。模块互相之间并没有依赖关系。无论代码的维护,还是未来的扩展,都会很方便。
理解总线:三种线路和多总线架构
理解了总线的设计概念,我们来看看,总线在实际的计算机硬件里面,到底是什么样。
现代的 Intel CPU 的体系结构里面,通常有好几条总线。
首先,CPU 和内存以及高速缓存通信的总线,这里面通常有两种总线。这种方式,我们称之为双独立总线(Dual Independent Bus,缩写为 DIB)。CPU 里,有一个快速的本地总线(Local Bus),以及一个速度相对较慢的前端总线(Front-side Bus)。
现代的 CPU 里,通常有专门的高速缓存芯片。这里的高速本地总线,就是用来和高速缓存通信的。而前端总线,则是用来和主内存以及输入输出设备通信的。有时候,我们会把本地总线也叫作后端总线(Back-side Bus),和前面的前端总线对应起来。而前端总线也有很多其他名字,比如处理器总线(Processor Bus)、内存总线(Memory Bus)。
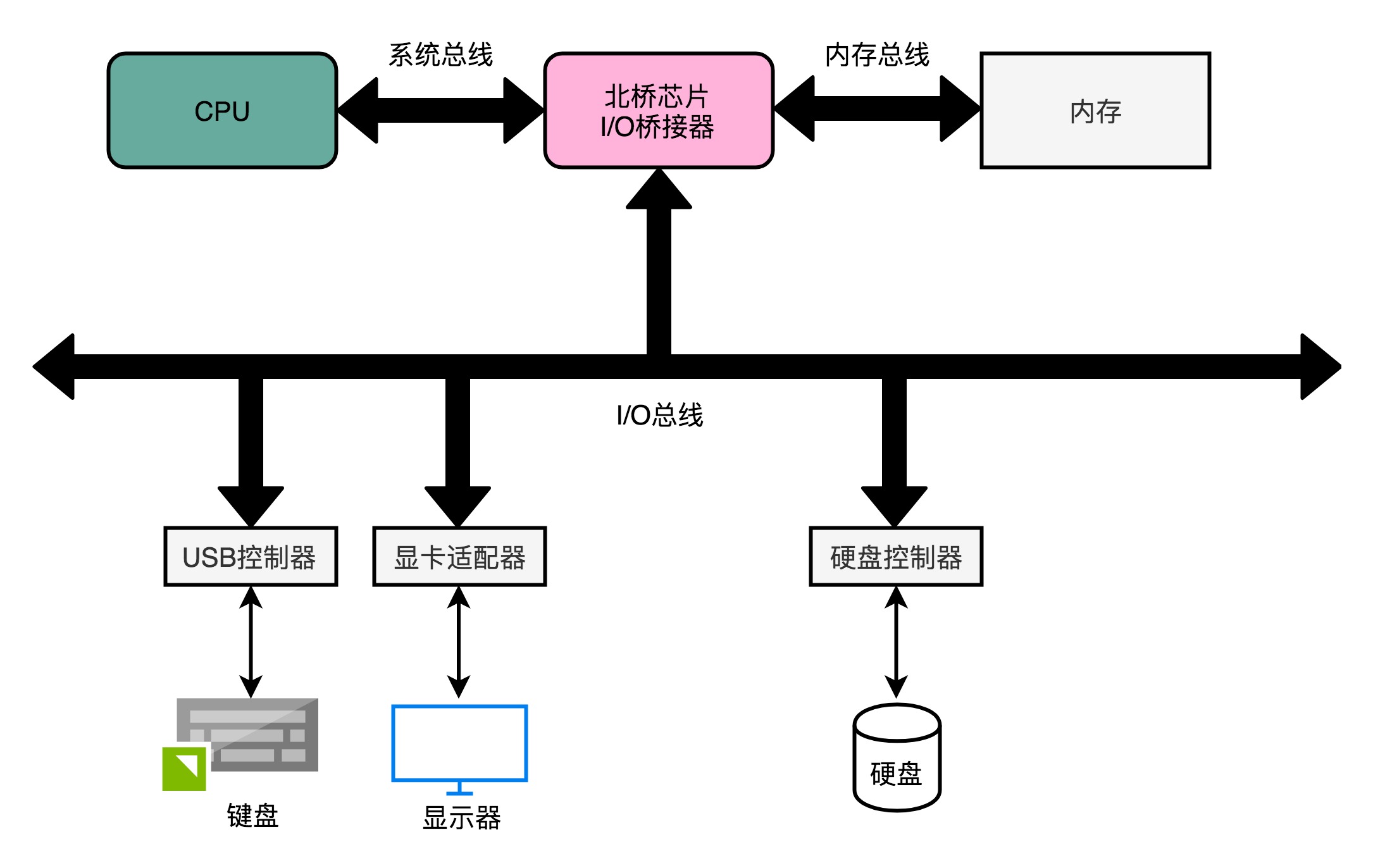
除了前端总线呢,我们常常还会听到 PCI 总线、I/O 总线或者系统总线(System Bus)。其实各种总线的命名一直都很混乱,我们不如直接来看一看CPU 的硬件架构图。对照图来看,一切问题就都清楚了。
CPU 里面的北桥芯片,把我们上面说的前端总线,一分为二,变成了三个总线。
我们的前端总线,其实就是系统总线。CPU 里面的内存接口,直接和系统总线通信,然后系统总线再接入一个 I/O 桥接器(I/O Bridge)。这个 I/O 桥接器,一边接入了我们的内存总线,使得我们的 CPU 和内存通信;另一边呢,又接入了一个 I/O 总线,用来连接 I/O 设备。
事实上,真实的计算机里,这个总线层面拆分得更细。根据不同的设备,还会分成独立的 PCI 总线、ISA 总线等等。

在物理层面,其实我们完全可以把总线看作一组“电线”。不过呢,这些电线之间也是有分工的,我们通常有三类线路。
- 数据线(Data Bus),用来传输实际的数据信息,也就是实际上了公交车的“人”。
- 地址线(Address Bus),用来确定到底把数据传输到哪里去,是内存的某个位置,还是某一个 I/O 设备。这个其实就相当于拿了个纸条,写下了上面的人要下车的站点。
- 控制线(Control Bus),用来控制对于总线的访问。虽然我们把总线比喻成了一辆公交车。那么有人想要做公交车的时候,需要告诉公交车司机,这个就是我们的控制信号。
尽管总线减少了设备之间的耦合,也降低了系统设计的复杂度,但同时也带来了一个新问题,那就是总线不能同时给多个设备提供通信功能。
我们的总线是很多个设备公用的,那多个设备都想要用总线,我们就需要有一个机制,去决定这种情况下,到底把总线给哪一个设备用。这个机制,就叫作总线裁决(Bus Arbitraction)。总线裁决的机制有很多种不同的实现,如果你对这个实现的细节感兴趣,可以去看一看 Wiki 里面关于裁决器的对应条目。
总结
讲解了计算机里各个不同的组件之间用来通信的渠道,也就是总线。总线的设计思路,核心是为了减少多个模块之间交互的复杂性和耦合度。实际上,总线这个设计思路在我们的软件开发过程中也经常会被用到。事件总线就是我们常见的一个设计模式,通常事件总线也会和订阅者发布者模式结合起来,成为大型系统的各个松耦合的模块之间交互的一种主要模式。
在实际的硬件层面,总线其实就是一组连接电路的线路。因为不同设备之间的速度有差异,所以一台计算机里面往往会有多个总线。常见的就有在 CPU 内部和高速缓存通信的本地总线,以及和外部 I/O 设备以及内存通信的前端总线。
前端总线通常也被叫作系统总线。它可以通过一个 I/O 桥接器,拆分成两个总线,分别来和 I/O 设备以及内存通信。自然,这样拆开的两个总线,就叫作 I/O 总线和内存总线。
总线本身的电路功能,又可以拆分成用来传输数据的数据线、用来传输地址的地址线,以及用来传输控制信号的控制线。
总线是一个各个接入的设备公用的线路,所以自然会在各个设备之间争夺总线所有权的情况。于是,我们需要一个机制来决定让谁来使用总线,这个决策机制就是总线裁决。
输入输出设备
接口和设备:经典的适配器模式
输入输出设备,并不只是一个设备。大部分的输入输出设备,都有两个组成部分。
第一个是它的接口(Interface),第二个才是实际的 I/O 设备(Actual I/O Device)。
我们的硬件设备并不是直接接入到总线上和 CPU 通信的,而是通过接口,用接口连接到总线上,再通过总线和 CPU 通信。
你平时听说的并行接口(Parallel Interface)、串行接口(Serial Interface)、USB 接口,都是计算机主板上内置的各个接口。我们的实际硬件设备,比如,使用并口的打印机、使用串口的老式鼠标或者使用 USB 接口的 U 盘,都要插入到这些接口上,才能和 CPU 工作以及通信的。
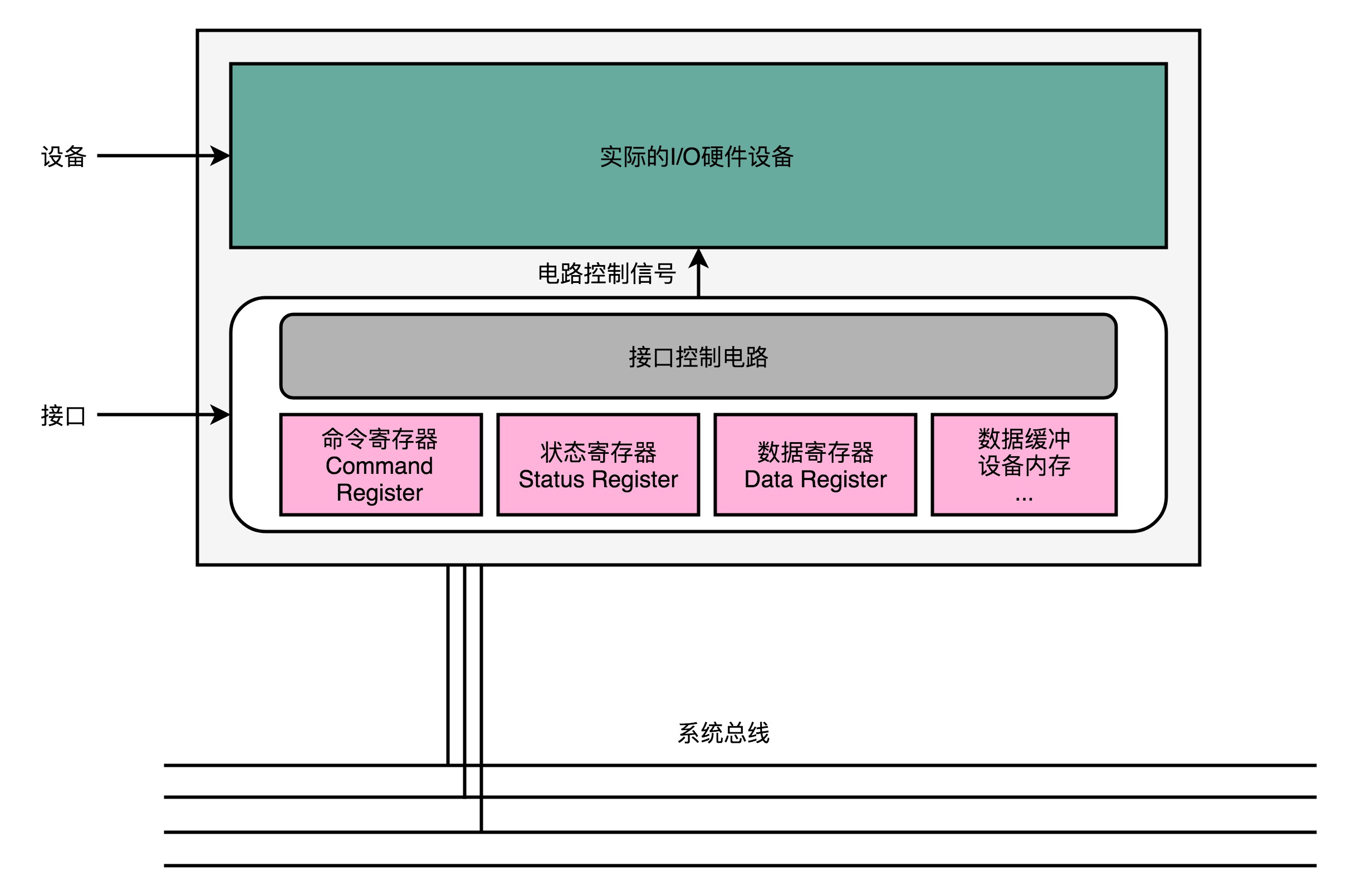
接口本身就是一块电路板。CPU 其实不是和实际的硬件设备打交道,而是和这个接口电路板打交道。我们平时说的,设备里面有三类寄存器,其实都在这个设备的接口电路上,而不在实际的设备上。
那这三类寄存器是哪三类寄存器呢?
它们分别是状态寄存器(Status Register)、 命令寄存器(Command Register)以及数据寄存器(Data Register),
除了内置在主板上的接口之外,有些接口可以集成在设备上。你可能都没有见过老一点儿的硬盘,简单给你介绍一下。
上世纪 90 年代的时候,大家用的硬盘都叫作IDE 硬盘。这个 IDE 不是像 IntelliJ 或者 WebStorm 这样的软件开发集成环境(Integrated Development Environment)的 IDE,而是代表着集成设备电路(Integrated Device Electronics)。也就是说,设备的接口电路直接在设备上,而不在主板上。我们需要通过一个线缆,把集成了接口的设备连接到主板上去。
把接口和实际设备分离,这个做法实际上来自于计算机走向开放架构(Open Architecture)的时代。
当我们要对计算机升级,我们不会扔掉旧的计算机,直接买一台全新的计算机,而是可以单独升级硬盘这样的设备。我们把老硬盘从接口上拿下来,换一个新的上去就好了。各种输入输出设备的制造商,也可以根据接口的控制协议,来设计和制造硬盘、鼠标、键盘、打印机乃至其他种种外设。正是这样的分工协作,带来了 PC 时代的繁荣。
其实,在软件的设计模式里也有这样的思路。面向对象里的面向接口编程的接口,就是 Interface。如果你做 iOS 的开发,Objective-C 里面的 Protocol 其实也是这个意思。而 Adaptor 设计模式,更是一个常见的、用来解决不同外部应用和系统“适配”问题的方案。可以看到,计算机的软件和硬件,在逻辑抽象上,其实是相通的。
如果你用的是 Windows 操作系统,你可以打开设备管理器,里面有各种各种的 Devices(设备)、Controllers(控制器)、Adaptors(适配器)。这些,其实都是对于输入输出设备不同角度的描述。被叫作 Devices,看重的是实际的 I/O 设备本身。被叫作 Controllers,看重的是输入输出设备接口里面的控制电路。而被叫作 Adaptors,则是看重接口作为一个适配器后面可以插上不同的实际设备。
CPU 是如何控制 I/O 设备的?
无论是内置在主板上的接口,还是集成在设备上的接口,除了三类寄存器之外,还有对应的控制电路。正是通过这个控制电路,CPU 才能通过向这个接口电路板传输信号,来控制实际的硬件。
我们先来看一看,硬件设备上的这些寄存器有什么用。这里,我拿我们平时用的打印机作为例子。
-
首先是数据寄存器(Data Register)。CPU 向 I/O 设备写入需要传输的数据,比如要打印的内容是“GeekTime”,我们就要先发送一个“G”给到对应的 I/O 设备。
-
然后是命令寄存器(Command Register)。CPU 发送一个命令,告诉打印机,要进行打印工作。这个时候,打印机里面的控制电路会做两个动作。
第一个,是去设置我们的状态寄存器里面的状态,把状态设置成 not-ready。
第二个,就是实际操作打印机进行打印。
-
而状态寄存器(Status Register),就是告诉了我们的 CPU,现在设备已经在工作了,所以这个时候,CPU 你再发送数据或者命令过来,都是没有用的。直到前面的动作已经完成,状态寄存器重新变成了 ready 状态,我们的 CPU 才能发送下一个字符和命令。
当然,在实际情况中,打印机里通常不只有数据寄存器,还会有数据缓冲区。我们的 CPU 也不是真的一个字符一个字符这样交给打印机去打印的,而是一次性把整个文档传输到打印机的内存或者数据缓冲区里面一起打印的。不过,通过上面这个例子,相信你对 CPU 是怎么操作 I/O 设备的,应该有所了解了。
信号和地址:发挥总线的价值
搞清楚了实际的 I/O 设备和接口之间的关系,一个新的问题就来了。那就是,我们的 CPU 到底要往总线上发送一个什么样的命令,才能和 I/O 接口上的设备通信呢?
CPU 和 I/O 设备的通信,一样是通过 CPU 支持的机器指令来执行的。
看看MIPS 的机器指令的分类,你会发现,我们并没有一种专门的和 I/O 设备通信的指令类型。那么,MIPS 的 CPU 到底是通过什么样的指令来和 I/O 设备来通信呢?
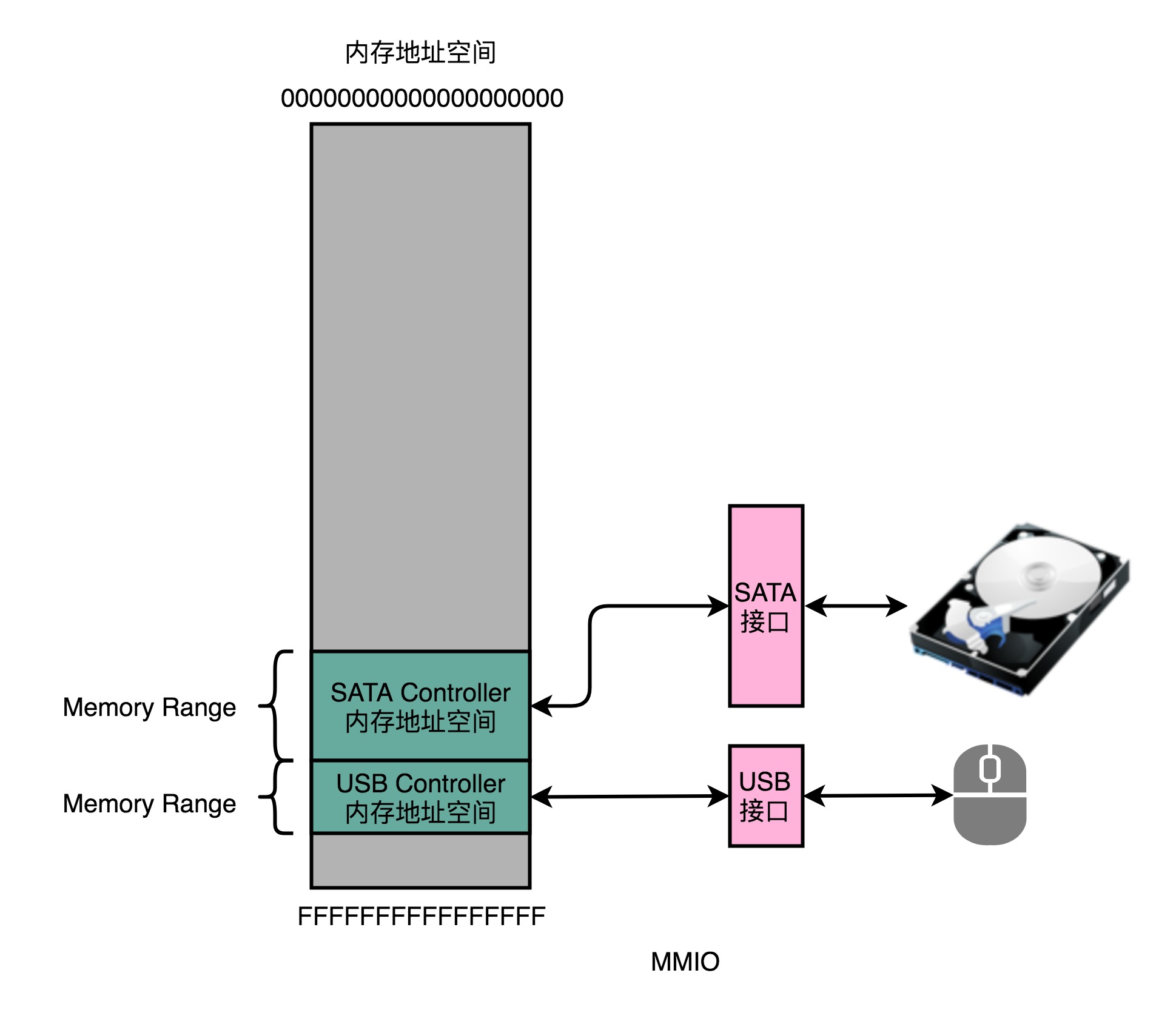
答案就是,和访问我们的主内存一样,使用“内存地址”。为了让已经足够复杂的 CPU 尽可能简单,计算机会把 I/O 设备的各个寄存器,以及 I/O 设备内部的内存地址,都映射到主内存地址空间里来。主内存的地址空间里,会给不同的 I/O 设备预留一段一段的内存地址。CPU 想要和这些 I/O 设备通信的时候呢,就往这些地址发送数据。这些地址信息,就是通过地址线来发送的,而对应的数据信息呢,自然就是通过数据线来发送的了。
而我们的 I/O 设备呢,就会监控地址线,并且在 CPU 往自己地址发送数据的时候,把对应的数据线里面传输过来的数据,接入到对应的设备里面的寄存器和内存里面来。CPU 无论是向 I/O 设备发送命令、查询状态还是传输数据,都可以通过这样的方式。这种方式呢,叫作内存映射IO(Memory-Mapped I/O,简称 MMIO)。
MMIO 不是唯一一种 CPU 和设备通信的方式。精简指令集 MIPS 的 CPU 特别简单,所以这里只有 MMIO。而我们有 2000 多个指令的 Intel X86 架构的计算机,自然可以设计专门的和 I/O 设备通信的指令,也就是 in 和 out 指令。
Intel CPU 虽然也支持 MMIO,不过它还可以通过特定的指令,来支持端口映射 I/O(Port-Mapped I/O,简称 PMIO)或者也可以叫独立输入输出(Isolated I/O)。
其实 PMIO 的通信方式和 MMIO 差不多,核心的区别在于,PMIO 里面访问的设备地址,不再是在内存地址空间里面,而是一个专门的端口(Port)。这个端口并不是指一个硬件上的插口,而是和 CPU 通信的一个抽象概念。
无论是 PMIO 还是 MMIO,CPU 都会传送一条二进制的数据,给到 I/O 设备的对应地址。设备自己本身的接口电路,再去解码这个数据。解码之后的数据呢,就会变成设备支持的一条指令,再去通过控制电路去操作实际的硬件设备。对于 CPU 来说,它并不需要关心设备本身能够支持哪些操作。它要做的,只是在总线上传输一条条数据就好了。
这个,其实也有点像我们在设计模式里面的 Command 模式。我们在总线上传输的,是一个个数据对象,然后各个接受这些对象的设备,再去根据对象内容,进行实际的解码和命令执行。
总结
CPU 并不是发送一个特定的操作指令来操作不同的 I/O 设备。因为如果是那样的话,随着新的 I/O 设备的发明,我们就要去扩展 CPU 的指令集了。
在计算机系统里面,CPU 和 I/O 设备之间的通信,是这么来解决的。
首先,在 I/O 设备这一侧,我们把 I/O 设备拆分成,能和 CPU 通信的接口电路,以及实际的 I/O 设备本身。接口电路里面有对应的状态寄存器、命令寄存器、数据寄存器、数据缓冲区和设备内存等等。接口电路通过总线和 CPU 通信,接收来自 CPU 的指令和数据。而接口电路中的控制电路,再解码接收到的指令,实际去操作对应的硬件设备。
而在 CPU 这一侧,对 CPU 来说,它看到的并不是一个个特定的设备,而是一个个内存地址或者端口地址。CPU 只是向这些地址传输数据或者读取数据。所需要的指令和操作内存地址的指令其实没有什么本质差别。通过软件层面对于传输的命令数据的定义,而不是提供特殊的新的指令,来实际操作对应的 I/O 硬件。
IO_WAIT
IO 性能、顺序访问和随机访问
如果去看硬盘厂商的性能报告,通常你会看到两个指标。一个是响应时间(Response Time),另一个叫作数据传输率(Data Transfer Rate)。
我们现在常用的硬盘有两种。一种是 HDD 硬盘,也就是我们常说的机械硬盘。另一种是 SSD 硬盘,一般也被叫作固态硬盘。现在的 HDD 硬盘,用的是 SATA 3.0 的接口。而 SSD 硬盘呢,通常会用两种接口,一部分用的也是 SATA 3.0 的接口;另一部分呢,用的是 PCI Express 的接口。
现在我们常用的 SATA 3.0 的接口,带宽是 6Gb/s。这里的“b”是比特。这个带宽相当于每秒可以传输 768MB 的数据。而我们日常用的 HDD 硬盘的数据传输率,差不多在 200MB/s 左右。
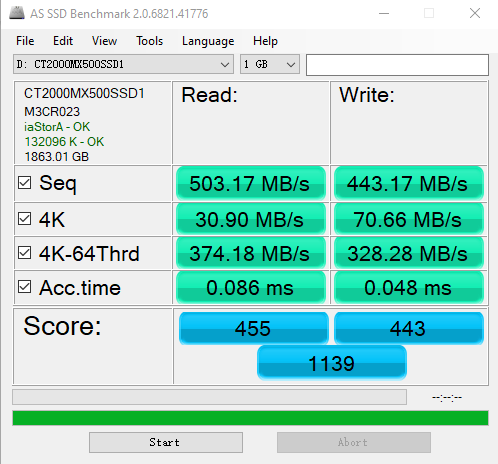
当我们换成 SSD 的硬盘,性能自然会好上不少。比如,Crucial MX500 的 SSD 硬盘。它的数据传输速率能到差不多 500MB/s,比 HDD 的硬盘快了一倍不止。不过 SATA 接口的硬盘,差不多到这个速度,性能也就到顶了。因为 SATA 接口的速度也就这么快。

不过,实际 SSD 硬盘能够更快,所以我们可以换用 PCI Express 的接口。它的数据传输率,在读取的时候就能做到 2GB/s 左右,差不多是 HDD 硬盘的 10 倍,而在写入的时候也能有 1.2GB/s。
除了数据传输率这个吞吐率指标,另一个我们关心的指标响应时间,其实也可以在 AS SSD 的测试结果里面看到,就是这里面的 Acc.Time 指标。
这个指标,其实就是程序发起一个硬盘的写入请求,直到这个请求返回的时间。可以看到,在上面的两块 SSD 硬盘上,大概时间都是在几十微秒这个级别。如果你去测试一块 HDD 的硬盘,通常会在几毫秒到十几毫秒这个级别。这个性能的差异,就不是 10 倍了,而是在几十倍,乃至几百倍。
光看响应时间和吞吐率这两个指标,似乎我们的硬盘性能很不错。即使是廉价的 HDD 硬盘,接收一个来自 CPU 的请求,也能够在几毫秒时间返回。一秒钟能够传输的数据,也有 200MB 左右。你想一想,我们平时往数据库里写入一条记录,也就是 1KB 左右的大小。我们拿 200MB 去除以 1KB,那差不多每秒钟可以插入 20 万条数据呢。但是这个计算出来的数字,似乎和我们日常的经验不符合啊?这又是为什么呢?
答案就来自于硬盘的读写。在顺序读写和随机读写的情况下,硬盘的性能是完全不同的。
我们回头看一下上面的 AS SSD 的性能指标。你会看到,里面有一个“4K”的指标。这个指标是什么意思呢?它其实就是我们的程序,去随机读取磁盘上某一个 4KB 大小的数据,一秒之内可以读取到多少数据。
你会发现,在这个指标上,我们使用 SATA 3.0 接口的硬盘和 PCI Express 接口的硬盘,性能差异变得很小。这是因为,在这个时候,接口本身的速度已经不是我们硬盘访问速度的瓶颈了。更重要的是,你会发现,即使我们用 PCI Express 的接口,在随机读写的时候,数据传输率也只能到 40MB/s 左右,是顺序读写情况下的几十分之一。
我们拿这个 40MB/s 和一次读取 4KB 的数据算一下。
也就是说,一秒之内,这块 SSD 硬盘可以随机读取 1 万次的 4KB 的数据。如果是写入的话呢,会更多一些,90MB /4KB 差不多是 2 万多次。
这个每秒读写的次数,我们称之为IOPS,也就是每秒输入输出操作的次数。事实上,比起响应时间,我们更关注 IOPS 这个性能指标。IOPS 和 DTR(Data Transfer Rate,数据传输率)才是输入输出性能的核心指标。
这是因为,我们在实际的应用开发当中,对于数据的访问,更多的是随机读写,而不是顺序读写。我们平时所说的服务器承受的“并发”,其实是在说,会有很多个不同的进程和请求来访问服务器。自然,它们在硬盘上访问的数据,是很难顺序放在一起的。这种情况下,随机读写的 IOPS 才是服务器性能的核心指标。
好了,回到我们引出 IOPS 这个问题的 HDD 硬盘。我现在要问你了,那一块 HDD 硬盘能够承受的 IOPS 是多少呢?
HDD 硬盘的 IOPS 通常也就在 100 左右,而不是在 20 万次。
如何定位 IO_WAIT?
我们看到,即使是用上了 PCI Express 接口的 SSD 硬盘,IOPS 也就是在 2 万左右。而我们的 CPU 的主频通常在 2GHz 以上,也就是每秒可以做 20 亿次操作。
即使 CPU 向硬盘发起一条读写指令,需要很多个时钟周期,一秒钟 CPU 能够执行的指令数,和我们硬盘能够进行的操作数,也有好几个数量级的差异。这也是为什么,我们在应用开发的时候往往会说“性能瓶颈在 I/O 上”。因为很多时候,CPU 指令发出去之后,不得不去“等”我们的 I/O 操作完成,才能进行下一步的操作。
那么,在实际遇到服务端程序的性能问题的时候,我们怎么知道这个问题是不是来自于 CPU 等 I/O 来完成操作呢?别着急,我们接下来,就通过 top 和 iostat 这些命令,一起来看看 CPU 到底有没有在等待 io 操作。
# top
你一定在 Linux 下用过 top 命令。对于很多刚刚入门 Linux 的同学,会用 top 去看服务的负载,也就是 load average。不过,在 top 命令里面,我们一样可以看到 CPU 是否在等待 IO 操作完成。
top - 06:26:30 up 4 days, 53 min, 1 user, load average: 0.79, 0.69, 0.65
Tasks: 204 total, 1 running, 203 sleeping, 0 stopped, 0 zombie
%Cpu(s): 20.0 us, 1.7 sy, 0.0 ni, 77.7 id, 0.0 wa, 0.0 hi, 0.7 si, 0.0 st
KiB Mem: 7679792 total, 6646248 used, 1033544 free, 251688 buffers
KiB Swap: 0 total, 0 used, 0 free. 4115536 cached Mem
top 命令的输出结果
在 top 命令的输出结果里面,有一行是以 %CPU 开头的。这一行里,有一个叫作 wa 的指标,这个指标就代表着 iowait,也就是 CPU 等待 IO 完成操作花费的时间占 CPU 的百分比。下一次,当你自己的服务器遇到性能瓶颈,load 很大的时候,你就可以通过 top 看一看这个指标。
知道了 iowait 很大,那么我们就要去看一看,实际的 I/O 操作情况是什么样的。这个时候,你就可以去用 iostat 这个命令了。我们输入“iostat”,就能够看到实际的硬盘读写情况。
$ iostat
avg-cpu: %user %nice %system %iowait %steal %idle
17.02 0.01 2.18 0.04 0.00 80.76
Device: tps kB_read/s kB_wrtn/s kB_read kB_wrtn
sda 1.81 2.02 30.87 706768 10777408
你会看到,这个命令里,不仅有 iowait 这个 CPU 等待时间的百分比,还有一些更加具体的指标了,并且它还是按照你机器上安装的多块不同的硬盘划分的。
这里的 tps 指标,其实就对应着我们上面所说的硬盘的 IOPS 性能。而 kB_read/s 和 kB_wrtn/s 指标,就对应着我们的数据传输率的指标。
知道实际硬盘读写的 tps、kB_read/s 和 kb_wrtn/s 的指标,我们基本上可以判断出,机器的性能是不是卡在 I/O 上了。那么,接下来,我们就是要找出到底是哪一个进程是这些 I/O 读写的来源了。这个时候,你需要“iotop”这个命令。
$ iotop
Total DISK READ : 0.00 B/s | Total DISK WRITE : 15.75 K/s
Actual DISK READ: 0.00 B/s | Actual DISK WRITE: 35.44 K/s
TID PRIO USER DISK READ DISK WRITE SWAPIN IO> COMMAND
104 be/3 root 0.00 B/s 7.88 K/s 0.00 % 0.18 % [jbd2/sda1-8]
383 be/4 root 0.00 B/s 3.94 K/s 0.00 % 0.00 % rsyslogd -n [rs:main Q:Reg]
1514 be/4 www-data 0.00 B/s 3.94 K/s 0.00 % 0.00 % nginx: worker process
通过 iotop 这个命令,你可以看到具体是哪一个进程实际占用了大量 I/O,那么你就可以有的放矢,去优化对应的程序了。
上面的这些示例里,不管是 wa 也好,tps 也好,它们都很小。那么,接下来,我就给你用 Linux 下,用 stress 命令,来模拟一个高 I/O 复杂的情况,来看看这个时候的 iowait 是怎么样的。
在一台云平台上的单个 CPU 核心的机器上输入“stress -i 2”,让 stress 这个程序模拟两个进程不停地从内存里往硬盘上写数据。
$ stress -i 2
$ top
你会看到,在 top 的输出里面,CPU 就有大量的 sy 和 wa,也就是系统调用和 iowait。
top - 06:56:02 up 3 days, 19:34, 2 users, load average: 5.99, 1.82, 0.63
Tasks: 88 total, 3 running, 85 sleeping, 0 stopped, 0 zombie
%Cpu(s): 3.0 us, 29.9 sy, 0.0 ni, 0.0 id, 67.2 wa, 0.0 hi, 0.0 si, 0.0 st
KiB Mem : 1741304 total, 1004404 free, 307152 used, 429748 buff/cache
KiB Swap: 0 total, 0 free, 0 used. 1245700 avail Mem
$ iostat 2 5
如果我们通过 iostat,查看硬盘的 I/O,你会看到,里面的 tps 很快就到了 4 万左右,占满了对应硬盘的 IOPS。
avg-cpu: %user %nice %system %iowait %steal %idle
5.03 0.00 67.92 27.04 0.00 0.00
Device: tps kB_read/s kB_wrtn/s kB_read kB_wrtn
sda 39762.26 0.00 0.00 0 0
如果这个时候我们去看一看 iotop,你就会发现,我们的 I/O 占用,都来自于 stress 产生的两个进程了。
$ iotop
Total DISK READ : 0.00 B/s | Total DISK WRITE : 0.00 B/s
Actual DISK READ: 0.00 B/s | Actual DISK WRITE: 0.00 B/s
TID PRIO USER DISK READ DISK WRITE SWAPIN IO> COMMAND
29161 be/4 xuwenhao 0.00 B/s 0.00 B/s 0.00 % 56.71 % stress -i 2
29162 be/4 xuwenhao 0.00 B/s 0.00 B/s 0.00 % 46.89 % stress -i 2
1 be/4 root 0.00 B/s 0.00 B/s 0.00 % 0.00 % init
相信到了这里,你也应该学会了怎么通过 top、iostat 以及 iotop,一步一步快速定位服务器端的 I/O 带来的性能瓶颈了。你也可以自己通过 Linux 的 man 命令,看一看这些命令还有哪些参数,以及通过 stress 来模拟其他更多不同的性能压力,看看我们的机器负载会发生什么变化。
总结
在顺序读取的情况下,无论是 HDD 硬盘还是 SSD 硬盘,性能看起来都是很不错的。不过,等到进行随机读取测试的时候,硬盘的性能才能见了真章。因为在大部分的应用开发场景下,我们关心的并不是在顺序读写下的数据量,而是每秒钟能够进行输入输出的操作次数,也就是 IOPS 这个核心性能指标。
你会发现,即使是使用 PCI Express 接口的 SSD 硬盘,IOPS 也就只是到了 2 万左右。这个性能,和我们 CPU 的每秒 20 亿次操作的能力比起来,可就差得远了。所以很多时候,我们的程序对外响应慢,其实都是 CPU 在等待 I/O 操作完成。
在 Linux 下,我们可以通过 top 这样的命令,来看整个服务器的整体负载。在应用响应慢的时候,我们可以先通过这个指令,来看 CPU 是否在等待 I/O 完成自己的操作。进一步地,我们可以通过 iostat 这个命令,来看到各个硬盘这个时候的读写情况。而 iotop 这个命令,能够帮助我们定位到到底是哪一个进程在进行大量的 I/O 操作。
这些命令的组合,可以快速帮你定位到是不是我们的程序遇到了 I/O 的瓶颈,以及这些瓶颈来自于哪些程序,你就可以根据定位的结果来优化你自己的程序了。
机械硬盘
拆解机械硬盘
机械硬盘的 IOPS,大概只能做到每秒 100 次左右。那么,这个 100 次究竟是怎么来的呢?
我们把机械硬盘拆开来看一看,看看它的物理构造是怎么样的,你就自然知道为什么它的 IOPS 是 100 左右了。
我们之前看过整个硬盘的构造,里面有接口,有对应的控制电路版,以及实际的 I/O 设备(也就是我们的机械硬盘)。这里,我们就拆开机械硬盘部分来看一看。
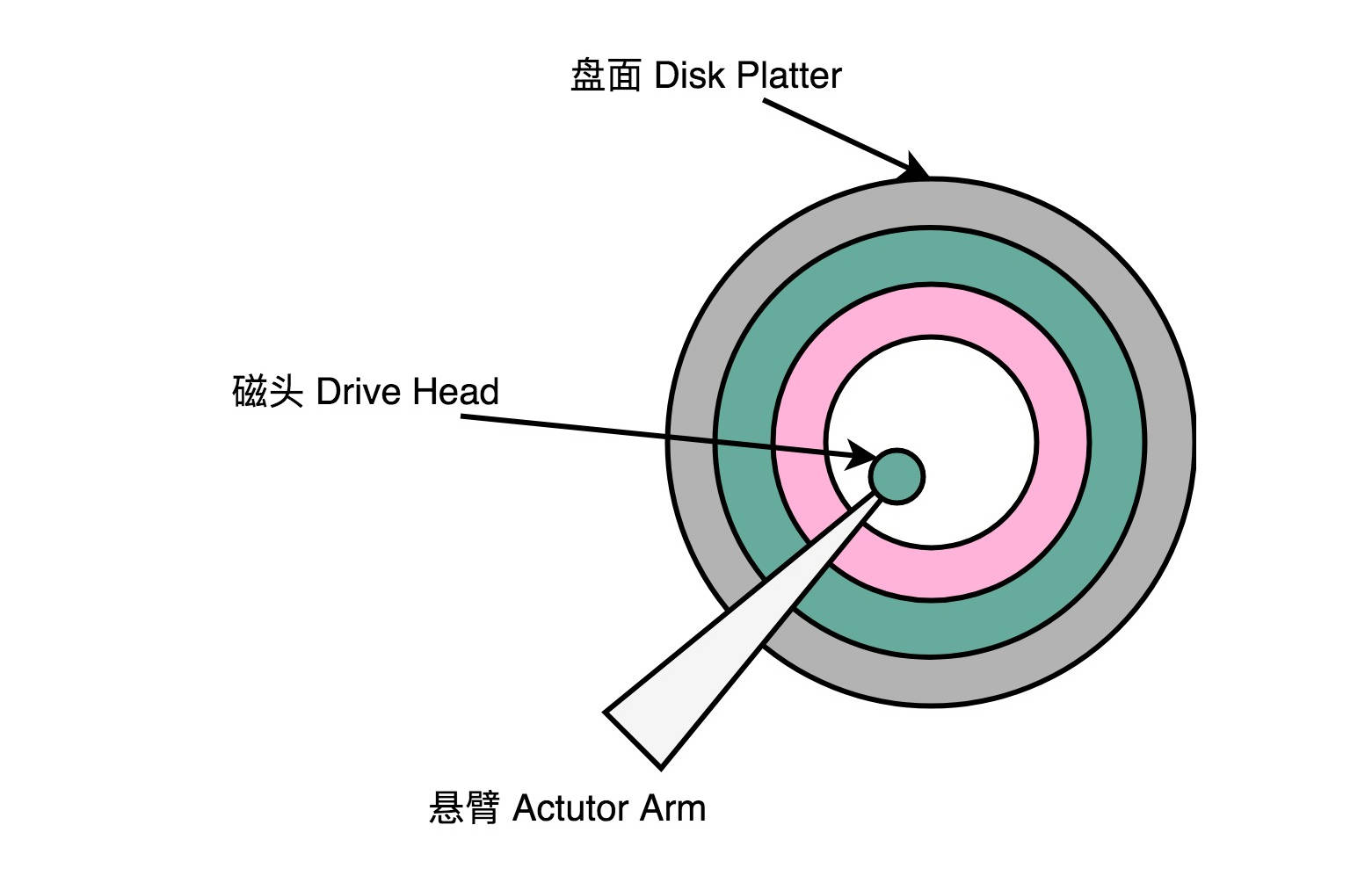
一块机械硬盘是由盘面、磁头和悬臂三个部件组成的。下面我们一一来看每一个部件。
首先,自然是盘面(Disk Platter)。盘面其实就是我们实际存储数据的盘片。如果你剪开过软盘的外壳,或者看过光盘 DVD,那你看到盘面应该很熟悉。盘面其实和它们长得差不多。
盘面本身通常是用的铝、玻璃或者陶瓷这样的材质做成的光滑盘片。然后,盘面上有一层磁性的涂层。我们的数据就存储在这个磁性的涂层上。盘面中间有一个受电机控制的转轴。这个转轴会控制我们的盘面去旋转。
我们平时买硬盘的时候经常会听到一个指标,叫作这个硬盘的转速。我们的硬盘有 5400 转的、7200 转的,乃至 10000 转的。这个多少多少转,指的就是盘面中间电机控制的转轴的旋转速度,英文单位叫RPM,也就是每分钟的旋转圈数(Rotations Per Minute)。所谓 7200 转,其实更准确地说是 7200RPM,指的就是一旦电脑开机供电之后,我们的硬盘就可以一直做到每分钟转上 7200 圈。如果折算到每一秒钟,就是 120 圈。
说完了盘面,我们来看磁头(Drive Head)。我们的数据并不能直接从盘面传输到总线上,而是通过磁头,从盘面上读取到,然后再通过电路信号传输给控制电路、接口,再到总线上的。
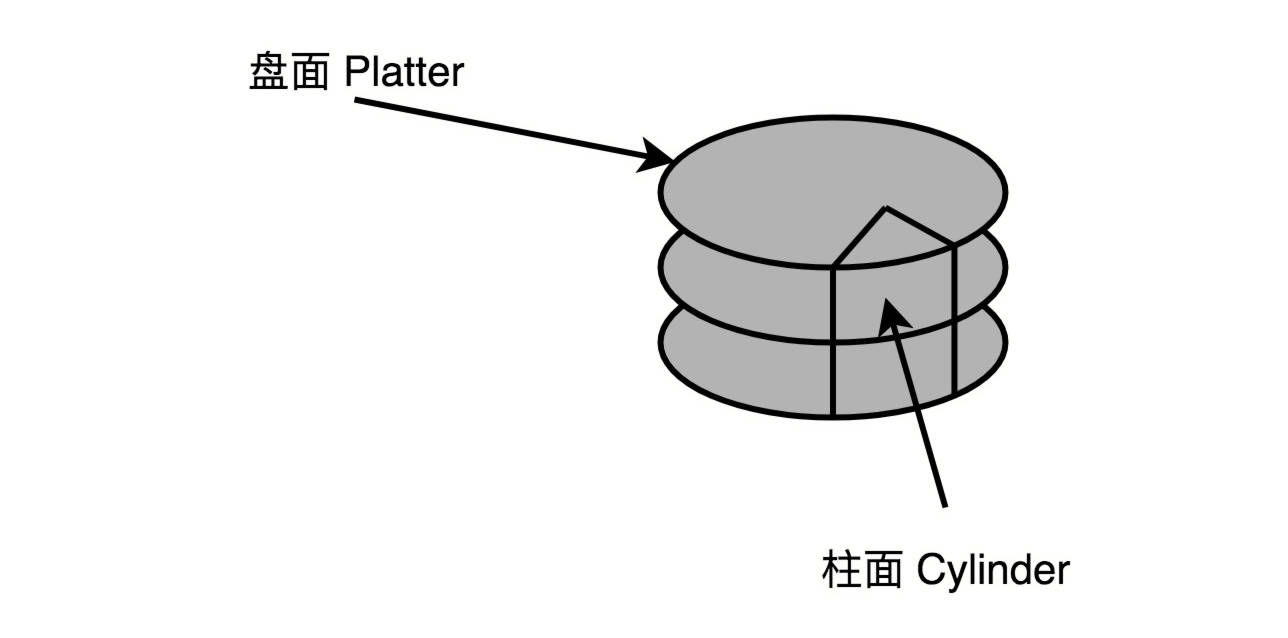
通常,我们的一个盘面上会有两个磁头,分别在盘面的正反面。盘面在正反两面都有对应的磁性涂层来存储数据,而且一块硬盘也不是只有一个盘面,而是上下堆叠了很多个盘面,各个盘面之间是平行的。每个盘面的正反两面都有对应的磁头。
最后我们来看悬臂(Actutor Arm)。悬臂链接在磁头上,并且在一定范围内会去把磁头定位到盘面的某个特定的磁道(Track)上。这个磁道是怎么来呢?想要了解这个问题,我们要先看一看我们的数据是怎么存放在盘面上的。
一个盘面通常是圆形的,由很多个同心圆组成,就好像是一个个大小不一样的“甜甜圈”嵌套在一起。每一个“甜甜圈”都是一个磁道。每个磁道都有自己的一个编号。悬臂其实只是控制,到底是读最里面那个“甜甜圈”的数据,还是最外面“甜甜圈”的数据。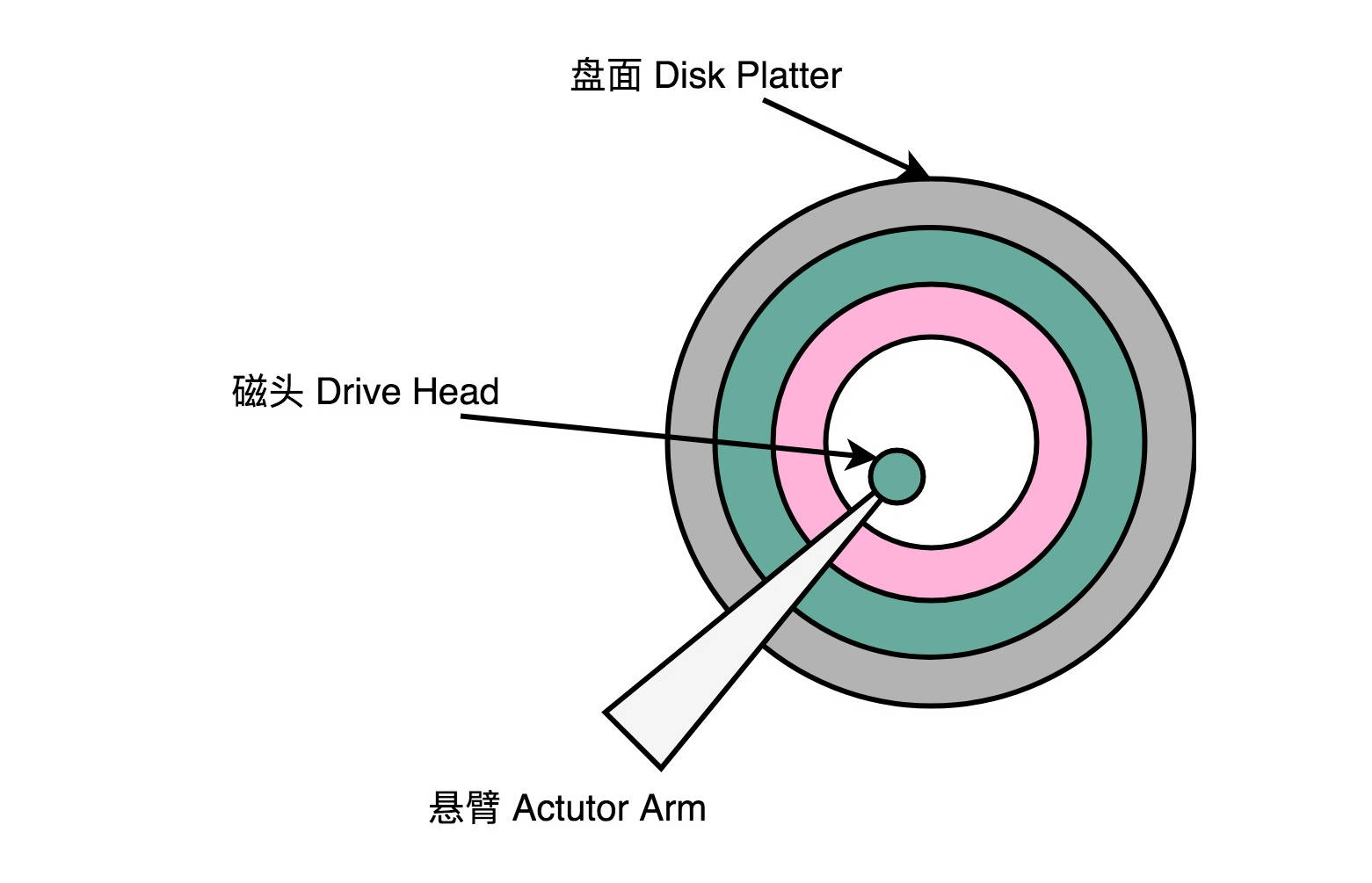
知道了我们硬盘的物理构成,现在我们就可以看一看,这样的物理结构,到底是怎么来读取数据的。
我们刚才说的一个磁道,会分成一个一个扇区(Sector)。上下平行的一个一个盘面的相同扇区呢,我们叫作一个柱面(Cylinder)。
读取数据,其实就是两个步骤。
一个步骤,就是把盘面旋转到某一个位置。在这个位置上,我们的悬臂可以定位到整个盘面的某一个子区间。这个子区间的形状有点儿像一块披萨饼,我们一般把这个区间叫作几何扇区(Geometrical Sector),意思是,在“几何位置上”,所有这些扇区都可以被悬臂访问到。
另一个步骤,就是把我们的悬臂移动到特定磁道的特定扇区,也就在这个“几何扇区”里面,找到我们实际的扇区。找到之后,我们的磁头会落下,就可以读取到正对着扇区的数据。
所以,我们进行一次硬盘上的随机访问,需要的时间由两个部分组成。
第一个部分,叫作平均延时(Average Latency)。这个时间,其实就是把我们的盘面旋转,把几何扇区对准悬臂位置的时间。这个时间很容易计算,它其实就和我们机械硬盘的转速相关。随机情况下,平均找到一个几何扇区,我们需要旋转半圈盘面。上面 7200 转的硬盘,那么一秒里面,就可以旋转 240 个半圈。那么,这个平均延时就是
第二个部分,叫作平均寻道时间(Average Seek Time),也就是在盘面选转之后,我们的悬臂定位到扇区的的时间。我们现在用的 HDD 硬盘的平均寻道时间一般在 4-10ms。
这样,我们就能够算出来,如果随机在整个硬盘上找一个数据,需要 8-14 ms。我们的硬盘是机械结构的,只有一个电机转轴,也只有一个悬臂,所以我们没有办法并行地去定位或者读取数据。那一块 7200 转的硬盘,我们一秒钟随机的 IO 访问次数,也就是
如果我们不是去进行随机的数据访问,而是进行顺序的数据读写,我们应该怎么最大化读取效率呢?
我们可以选择把顺序存放的数据,尽可能地存放在同一个柱面上。这样,我们只需要旋转一次盘面,进行一次寻道,就可以去写入或者读取,同一个垂直空间上的多个盘面的数据。如果一个柱面上的数据不够,我们也不要去动悬臂,而是通过电机转动盘面,这样就可以顺序读完一个磁道上的所有数据。所以,其实对于 HDD 硬盘的顺序数据读写,吞吐率还是很不错的,可以达到 200MB/s 左右。
Partial Stroking:根据场景提升性能
只有 100 的 IOPS,其实很难满足现在互联网海量高并发的请求。所以,今天的数据库,都会把数据存储在 SSD 硬盘上。不过,如果我们把时钟倒播 20 年,那个时候,我们可没有现在这么便宜的 SSD 硬盘。数据库里面的数据,只能存放在 HDD 硬盘上。
今天,即便是数据中心用的 HDD 硬盘,一般也是 7200 转的,因为如果要更快的随机访问速度,我们会选择用 SSD 硬盘。但是在当时,SSD 硬盘价格非常昂贵,还没有能够商业化。硬盘厂商们在不断地研发转得更快的硬盘。在数据中心里,往往我们会用上 10000 转,乃至 15000 转的硬盘。甚至直到 2010 年,SSD 硬盘已经开始逐步进入市场了,西数还在尝试研发 20000 转的硬盘。转速更高、寻道时间更短的机械硬盘,才能满足实际的数据库需求。
不过,10000 转,乃至 15000 转的硬盘也更昂贵。如果你想要节约成本,提高性价比,那就得想点别的办法。你应该听说过,Google 早年用家用 PC 乃至二手的硬件,通过软件层面的设计来解决可靠性和性能的问题。那么,我们是不是也有什么办法,能提高机械硬盘的 IOPS 呢?
还真的有。这个方法,就叫作Partial Stroking或者Short Stroking。没有看到过有中文资料给这个方法命名。在这里,我就暂时把它翻译成“缩短行程”技术。
其实这个方法的思路很容易理解。既然我们访问一次数据的时间,是“平均延时 + 寻道时间”,那么只要能缩短这两个之一,不就可以提升 IOPS 了吗?
一般情况下,硬盘的寻道时间都比平均延时要长。那么我们自然就可以想一下,有什么办法可以缩短平均的寻道时间。最极端的办法就是我们不需要寻道,也就是说,我们把所有数据都放在一个磁道上。比如,我们始终把磁头放在最外道的磁道上。这样,我们的寻道时间就基本为 0,访问时间就只有平均延时了。那样,我们的 IOPS,就变成了
不过呢,只用一个磁道,我们能存的数据就比较有限了。这个时候,可能我们还不如把这些数据直接都放到内存里面呢。所以,实践当中,我们可以只用 1/2 或者 1/4 的磁道,也就是最外面 1/4 或者 1/2 的磁道。这样,我们硬盘可以使用的容量可能变成了 1/2 或者 1/4。但是呢,我们的寻道时间,也变成了 1/4 或者 1/2,因为悬臂需要移动的“行程”也变成了原来的 1/2 或者 1/4,我们的 IOPS 就能够大幅度提升了。
比如说,我们一块 7200 转的硬盘,正常情况下,平均延时是 4.17ms,而寻道时间是 9ms。那么,它原本的 IOPS 就是
如果我们只用其中 1/4 的磁道,那么,它的 IOPS 就变成了
你看这个结果,IOPS 提升了一倍,和一块 15000 转的硬盘的性能差不多了。不过,这个情况下,我们的硬盘能用的空间也只有原来的 1/4 了。不过,要知道在当时,同样容量的 15000 转的硬盘的价格可不止是 7200 转硬盘的 4 倍啊。所以,这样通过软件去格式化硬盘,只保留部分磁道让系统可用的情况,可以大大提升硬件的性价比。
在 2000-2010 年这 10 年间,正是这些奇思妙想,让海量数据下的互联网蓬勃发展起来的。在没有 SSD 的硬盘的时候,聪明的工程师们从硬件到软件,设计了各种有意思的方案解决了我们遇到的各类性能问题。而对于计算机底层知识的深入了解,也是能够找到这些解决办法的核心因素。
总结
机械硬盘的硬件,主要由盘面、磁头和悬臂三部分组成。我们的数据在盘面上的位置,可以通过磁道、扇区和柱面来定位。实际的一次对于硬盘的访问,需要把盘面旋转到某一个“几何扇区”,对准悬臂的位置。然后,悬臂通过寻道,把磁头放到我们实际要读取的扇区上。
受制于机械硬盘的结构,我们对于随机数据的访问速度,就要包含旋转盘面的平均延时和移动悬臂的寻道时间。通过这两个时间,我们能计算出机械硬盘的 IOPS。
7200 转机械硬盘的 IOPS,只能做到 100 左右。在互联网时代的早期,我们也没有 SSD 硬盘可以用,所以工程师们就想出了 Partial Stroking 这个浪费存储空间,但是可以缩短寻道时间来提升硬盘的 IOPS 的解决方案。这个解决方案,也是一个典型的、在深入理解了硬件原理之后的软件优化方案。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号