

计算机组成原理——原理篇 处理器(中)
冒险和预测
流水线设计需要解决的三大冒险,分别是结构冒险(Structural Hazard)、数据冒险(Data Hazard)以及控制冒险(Control Hazard)。
在 CPU 的流水线设计里,固然我们会遇到各种“危险”情况,使得流水线里的下一条指令不能正常运行。但是,我们其实还是通过“抢跑”的方式,“冒险”拿到了一个提升指令吞吐率的机会。流水线架构的 CPU,是我们主动进行的冒险选择。我们期望能够通过冒险带来更高的回报。
结构冒险
结构冒险,本质上是一个硬件层面的资源竞争问题,也就是一个硬件电路层面的问题。
CPU 在同一个时钟周期,同时在运行两条计算机指令的不同阶段。但是这两个不同的阶段,可能会用到同样的硬件电路。
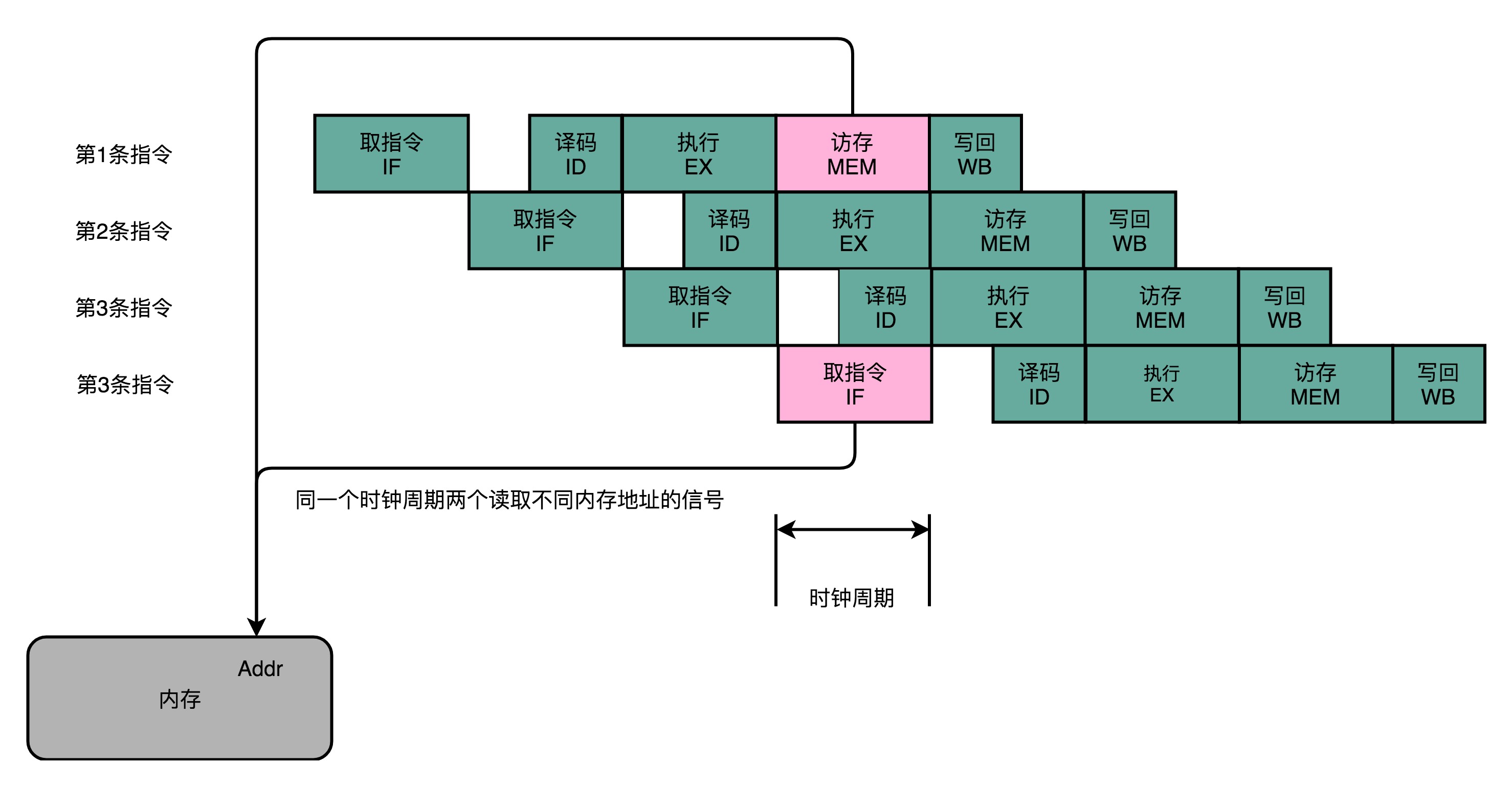
最典型的例子就是内存的数据访问。请你看看下面这张示意图。
可以看到,在第 1 条指令执行到访存(MEM)阶段的时候,流水线里的第 4 条指令,在执行取指令(Fetch)的操作。访存和取指令,都要进行内存数据的读取。
我们的内存,只有一个地址译码器的作为地址输入,那就只能在一个时钟周期里面读取一条数据,没办法同时执行第 1 条指令的读取内存数据和第 4 条指令的读取指令代码。
类似的资源冲突,其实你在日常使用计算机的时候也会遇到。最常见的就是薄膜键盘的“锁键”问题。常用的最廉价的薄膜键盘,并不是每一个按键的背后都有一根独立的线路,而是多个键共用一个线路。如果我们在同一时间,按下两个共用一个线路的按键,这两个按键的信号就没办法都传输出去。
这也是为什么,重度键盘用户,都要买贵一点儿的机械键盘或者电容键盘。因为这些键盘的每个按键都有独立的传输线路,可以做到“全键无冲”,这样,无论你是要大量写文章、写程序,还是打游戏,都不会遇到按下了键却没生效的情况。
“全键无冲”这样的资源冲突解决方案,其实本质就是增加资源。同样的方案,我们一样可以用在 CPU 的结构冒险里面。对于访问内存数据和取指令的冲突,一个直观的解决方案就是把我们的内存分成两部分,让它们各有各的地址译码器。这两部分分别是存放指令的程序内存和存放数据的数据内存。
这样把内存拆成两部分的解决方案,在计算机体系结构里叫作哈佛架构(Harvard Architecture),来自哈佛大学设计Mark I 型计算机时候的设计。对应的,我们之前说的冯·诺依曼体系结构,又叫作普林斯顿架构(Princeton Architecture)。从这些名字里,我们可以看到,早年的计算机体系结构的设计,其实产生于美国各个高校之间的竞争中。
不过,我们今天使用的 CPU,仍然是冯·诺依曼体系结构的,并没有把内存拆成程序内存和数据内存这两部分。因为如果那样拆的话,对程序指令和数据需要的内存空间,我们就没有办法根据实际的应用去动态分配了。虽然解决了资源冲突的问题,但是也失去了灵活性。
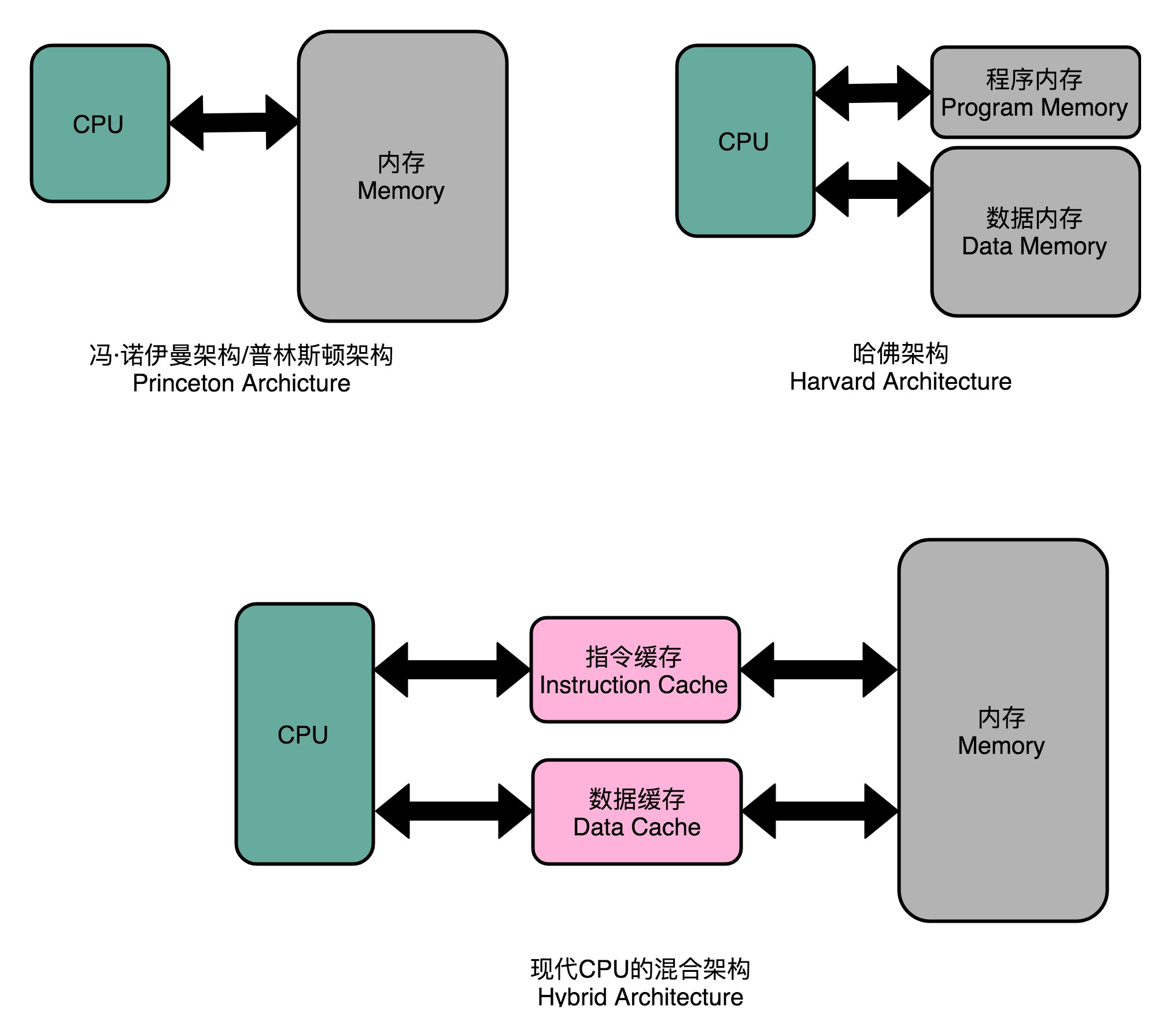
不过,借鉴了哈佛结构的思路,现代的 CPU 虽然没有在内存层面进行对应的拆分,却在 CPU 内部的高速缓存部分进行了区分,把高速缓存分成了指令缓存(Instruction Cache)和数据缓存(Data Cache)两部分。
内存的访问速度远比 CPU 的速度要慢,所以现代的 CPU 并不会直接读取主内存。它会从主内存把指令和数据加载到高速缓存中,这样后续的访问都是访问高速缓存。而指令缓存和数据缓存的拆分,使得我们的 CPU 在进行数据访问和取指令的时候,不会再发生资源冲突的问题了。
数据冒险
数据冒险,其实就是同时在执行的多个指令之间,有数据依赖的情况。这些数据依赖,我们可以分成三大类,分别是先写后读(Read After Write,RAW)、先读后写(Write After Read,WAR)和写后再写(Write After Write,WAW)。下面,我们分别看一下这几种情况。
先写后读(Read After Write)
我们先来一起看看先写后读这种情况。这里有一段简单的 C 语言代码编译出来的汇编指令。这段代码简单地定义两个变量 a 和 b,然后计算 a = a + 2。再根据计算出来的结果,计算 b = a + 3。
int main() {
int a = 1;
int b = 2;
a = a + 2;
b = a + 3;
}
int main() {
0: 55 push rbp
1: 48 89 e5 mov rbp,rsp
int a = 1;
4: c7 45 fc 01 00 00 00 mov DWORD PTR [rbp-0x4],0x1
int b = 2;
b: c7 45 f8 02 00 00 00 mov DWORD PTR [rbp-0x8],0x2
a = a + 2;
12: 83 45 fc 02 add DWORD PTR [rbp-0x4],0x2
b = a + 3;
16: 8b 45 fc mov eax,DWORD PTR [rbp-0x4]
19: 83 c0 03 add eax,0x3
1c: 89 45 f8 mov DWORD PTR [rbp-0x8],eax
}
1f: 5d pop rbp
20: c3 ret
你可以看到,在内存地址为 12 的机器码,我们把 0x2 添加到 rbp-0x4 对应的内存地址里面。然后,在紧接着的内存地址为 16 的机器码,我们又要从 rbp-0x4 这个内存地址里面,把数据写入到 eax 这个寄存器里面。
所以,我们需要保证,在内存地址为 16 的指令读取 rbp-0x4 里面的值之前,内存地址 12 的指令写入到 rbp-0x4 的操作必须完成。这就是先写后读所面临的数据依赖。如果这个顺序保证不了,我们的程序就会出错。
这个先写后读的依赖关系,我们一般被称之为数据依赖,也就是 Data Dependency。
先读后写(Write After Read)
我们还会面临的另外一种情况,先读后写。我们小小地修改一下代码,先计算 a = b + a,然后再计算 b = a + b。
int main() {
int a = 1;
int b = 2;
a = b + a;
b = a + b;
}
int main() {
0: 55 push rbp
1: 48 89 e5 mov rbp,rsp
int a = 1;
4: c7 45 fc 01 00 00 00 mov DWORD PTR [rbp-0x4],0x1
int b = 2;
b: c7 45 f8 02 00 00 00 mov DWORD PTR [rbp-0x8],0x2
a = b + a;
12: 8b 45 f8 mov eax,DWORD PTR [rbp-0x8]
15: 01 45 fc add DWORD PTR [rbp-0x4],eax
b = a + b;
18: 8b 45 fc mov eax,DWORD PTR [rbp-0x4]
1b: 01 45 f8 add DWORD PTR [rbp-0x8],eax
}
1e: 5d pop rbp
1f: c3 ret
我们同样看看对应生成的汇编代码。在内存地址为 15 的汇编指令里,我们要把 eax 寄存器里面的值读出来,再加到 rbp-0x4 的内存地址里。接着在内存地址为 18 的汇编指令里,我们要再写入更新 eax 寄存器里面。
如果我们在内存地址 18 的 eax 的写入先完成了,在内存地址为 15 的代码里面取出 eax 才发生,我们的程序计算就会出错。这里,我们同样要保障对于 eax 的先读后写的操作顺序。
这个先读后写的依赖,一般被叫作反依赖,也就是 Anti-Dependency。
写后再写(Write After Write)
我们再次小小地改写上面的代码。这次,我们先设置变量 a = 1,然后再设置变量 a = 2。
int main() {
int a = 1;
a = 2;
}
int main() {
0: 55 push rbp
1: 48 89 e5 mov rbp,rsp
int a = 1;
4: c7 45 fc 01 00 00 00 mov DWORD PTR [rbp-0x4],0x1
a = 2;
b: c7 45 fc 02 00 00 00 mov DWORD PTR [rbp-0x4],0x2
}
在这个情况下,你会看到,内存地址 4 所在的指令和内存地址 b 所在的指令,都是将对应的数据写入到 rbp-0x4 的内存地址里面。如果内存地址 b 的指令在内存地址 4 的指令之后写入。
那么这些指令完成之后,rbp-0x4 里的数据就是错误的。
这就会导致后续需要使用这个内存地址里的数据指令,没有办法拿到正确的值。
所以,我们也需要保障内存地址 4 的指令的写入,在内存地址 b 的指令的写入之前完成。
这个写后再写的依赖,一般被叫作输出依赖,也就是 Output Dependency。
通过流水线停顿解决数据冒险
除了读之后再进行读,你会发现,对于同一个寄存器或者内存地址的操作,都有明确强制的顺序要求。而这个顺序操作的要求,也为我们使用流水线带来了很大的挑战。因为流水线架构的核心,就是在前一个指令还没有结束的时候,后面的指令就要开始执行。
所以,我们需要有解决这些数据冒险的办法。其中最简单的一个办法,不过也是最笨的一个办法,就是流水线停顿(Pipeline Stall),或者叫流水线冒泡(Pipeline Bubbling)。
流水线停顿的办法很容易理解。如果我们发现了后面执行的指令,会对前面执行的指令有数据层面的依赖关系,那最简单的办法就是“再等等”。我们在进行指令译码的时候,会拿到对应指令所需要访问的寄存器和内存地址。所以,在这个时候,我们能够判断出来,这个指令是否会触发数据冒险。如果会触发数据冒险,我们就可以决定,让整个流水线停顿一个或者多个周期。
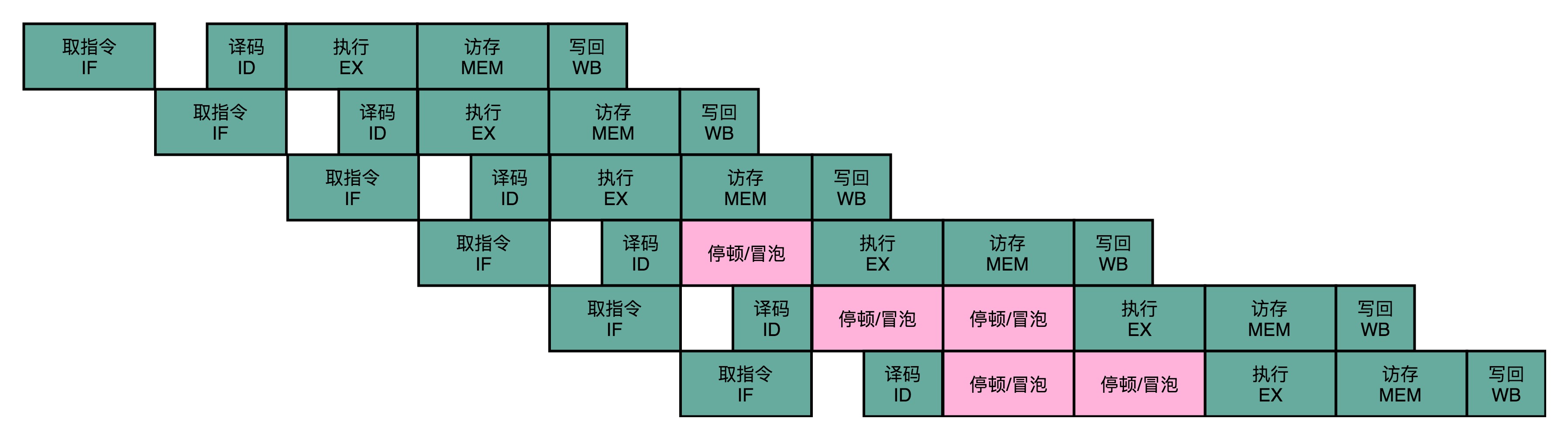
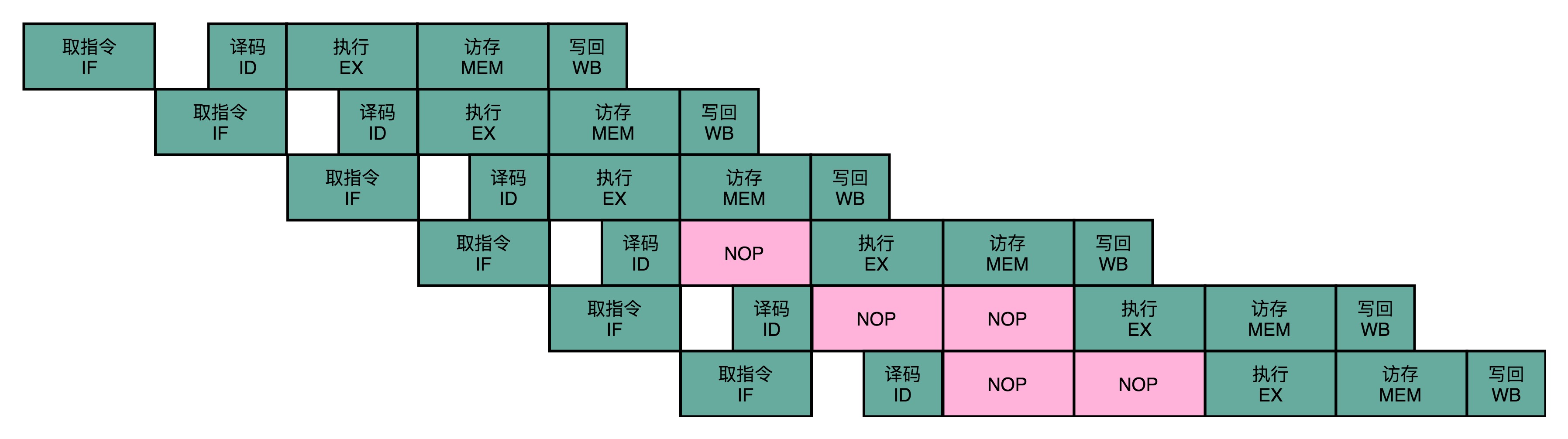
前面说过,时钟信号会不停地在 0 和 1 之前自动切换。其实,我们并没有办法真的停顿下来。流水线的每一个操作步骤必须要干点儿事情。所以,在实践过程中,我们并不是让流水线停下来,而是在执行后面的操作步骤前面,插入一个 NOP 操作,也就是执行一个其实什么都不干的操作。
这个插入的指令,就好像一个水管(Pipeline)里面,进了一个空的气泡。在水流经过的时候,没有传送水到下一个步骤,而是给了一个什么都没有的空气泡。这也是为什么,我们的流水线停顿,又被叫作流水线冒泡(Pipeline Bubble)的原因。
NOP 操作和指令对齐
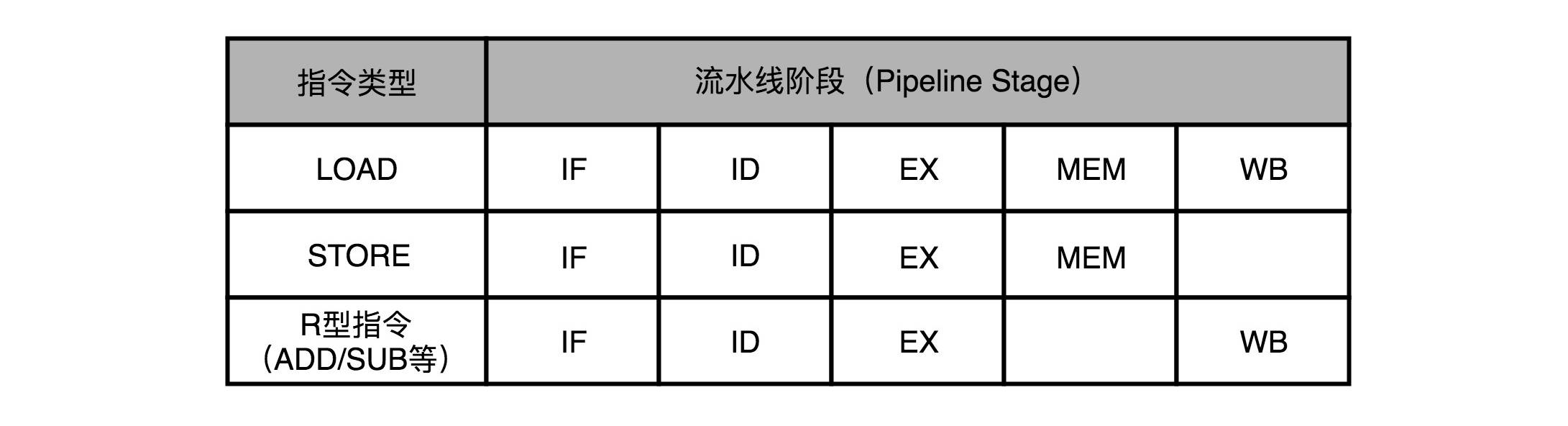
要想理解操作数前推技术,我们先来回顾一下MIPS 体系结构下的 R、I、J 三类指令,五级流水线“取指令(IF)- 指令译码(ID)- 指令执行(EX)- 内存访问(MEM)- 数据写回(WB) ”。
把对应的图片放进来了,你可以看一下。


在 MIPS 的体系结构下,不同类型的指令,会在流水线的不同阶段进行不同的操作。
我们以 MIPS 的 LOAD,这样从内存里读取数据到寄存器的指令为例,来仔细看看,它需要经历的 5 个完整的流水线。
STORE 这样从寄存器往内存里写数据的指令,不需要有写回寄存器的操作,也就是没有数据写回的流水线阶段。
至于像 ADD 和 SUB 这样的加减法指令,所有操作都在寄存器完成,所以没有实际的内存访问(MEM)操作。
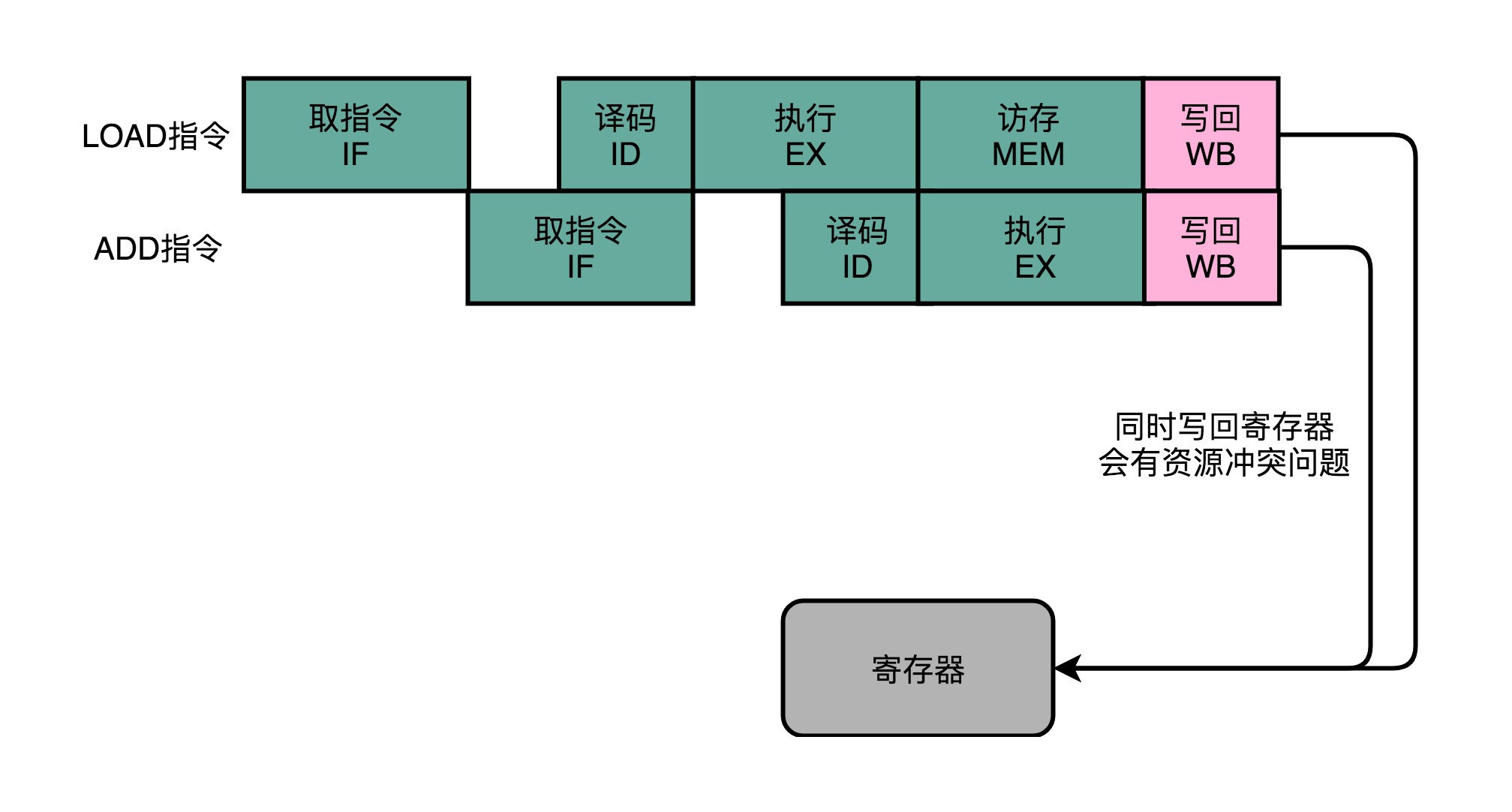
有些指令没有对应的流水线阶段,但是我们并不能跳过对应的阶段直接执行下一阶段。不然,如果我们先后执行一条 LOAD 指令和一条 ADD 指令,就会发生 LOAD 指令的 WB 阶段和 ADD 指令的 WB 阶段,在同一个时钟周期发生。这样,相当于触发了一个结构冒险事件,产生了资源竞争。
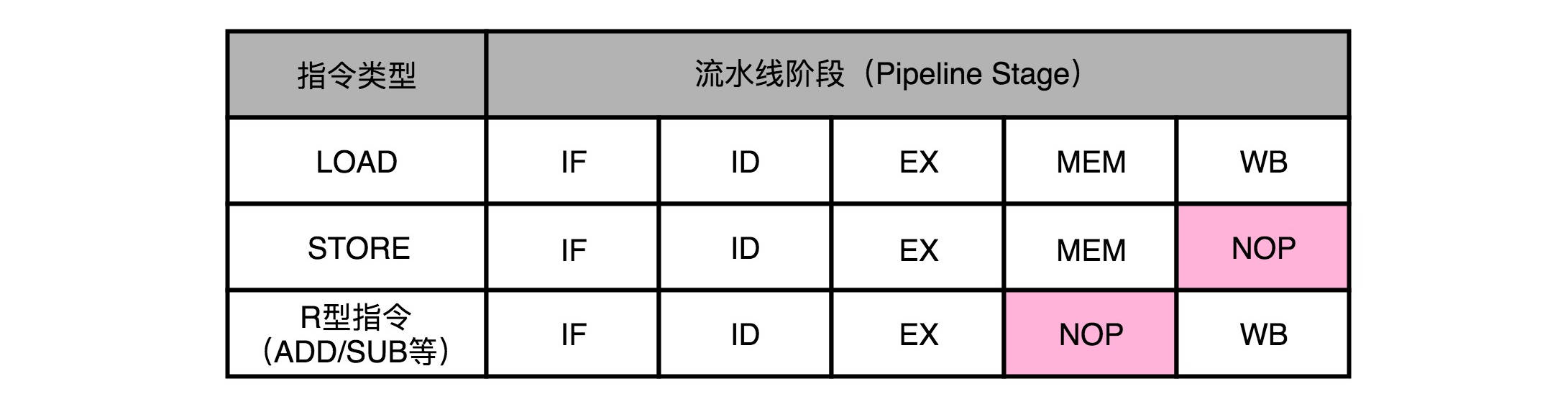
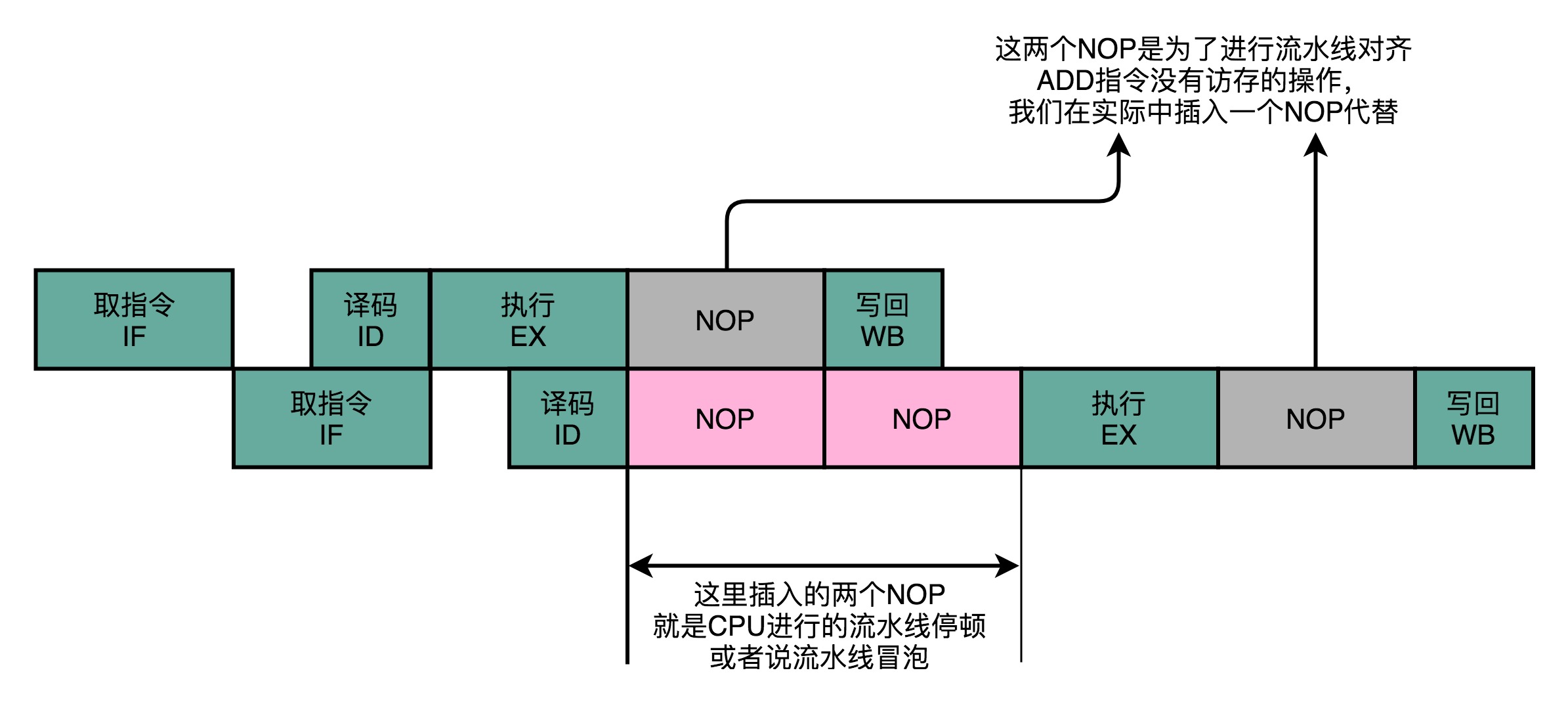
所以,在实践当中,各个指令不需要的阶段,并不会直接跳过,而是会运行一次 NOP 操作。通过插入一个 NOP 操作,我们可以使后一条指令的每一个 Stage,一定不和前一条指令的同 Stage 在一个时钟周期执行。这样,就不会发生先后两个指令,在同一时钟周期竞争相同的资源,产生结构冒险了。
操作数前推
通过 NOP 操作进行对齐,我们在流水线里,就不会遇到资源竞争产生的结构冒险问题了。除了可以解决结构冒险之外,这个 NOP 操作,也是我们之前讲的流水线停顿插入的对应操作。
但是,插入过多的 NOP 操作,意味着我们的 CPU 总是在空转,干吃饭不干活。那么,我们有没有什么办法,尽量少插入一些 NOP 操作呢?不要着急,下面我们就以两条先后发生的 ADD 指令作为例子,看看能不能找到一些好的解决方案。
add $t0, $s2,$s1
add $s2, $s1,$t0
这两条指令很简单。
- 第一条指令,把 s1 和 s2 寄存器里面的数据相加,存入到 t0 这个寄存器里面。
- 第二条指令,把 s1 和 t0 寄存器里面的数据相加,存入到 s2 这个寄存器里面。
因为后一条的 add 指令,依赖寄存器 t0 里的值。而 t0 里面的值,又来自于前一条指令的计算结果。所以后一条指令,需要等待前一条指令的数据写回阶段完成之后,才能执行。我们遇到了一个数据依赖类型的冒险。于是,我们就不得不通过流水线停顿来解决这个冒险问题。我们要在第二条指令的译码阶段之后,插入对应的 NOP 指令,直到前一天指令的数据写回完成之后,才能继续执行。
这样的方案,虽然解决了数据冒险的问题,但是也浪费了两个时钟周期。我们的第 2 条指令,其实就是多花了 2 个时钟周期,运行了两次空转的 NOP 操作。
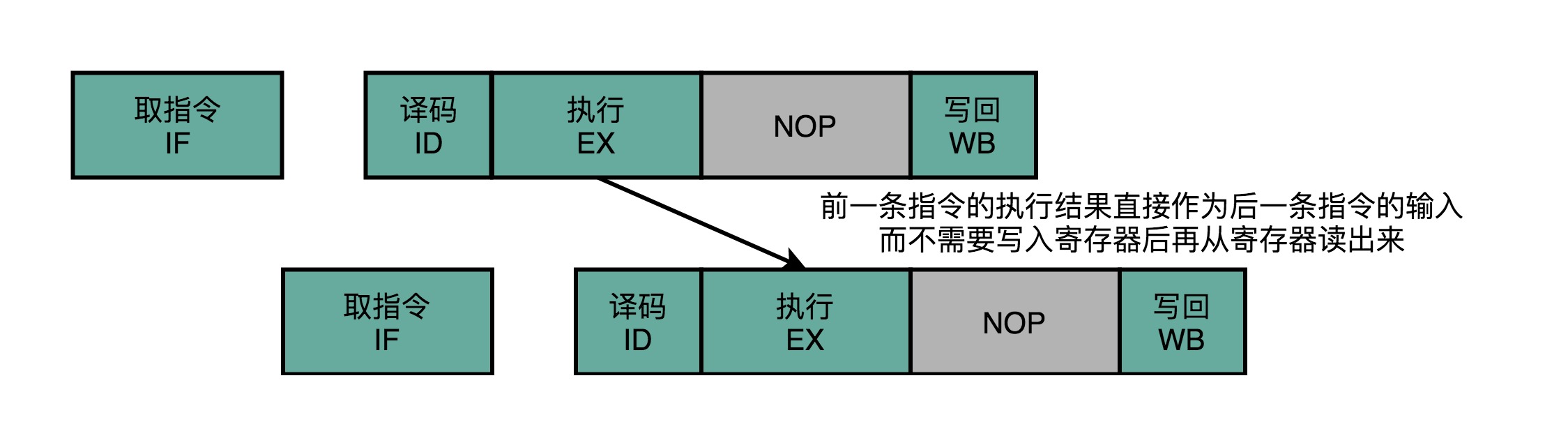
不过,其实我们第二条指令的执行,未必要等待第一条指令写回完成,才能进行。如果我们第一条指令的执行结果,能够直接传输给第二条指令的执行阶段,作为输入,那我们的第二条指令,就不用再从寄存器里面,把数据再单独读出来一次,才来执行代码。
我们完全可以在第一条指令的执行阶段完成之后,直接将结果数据传输给到下一条指令的 ALU。然后,下一条指令不需要再插入两个 NOP 阶段,就可以继续正常走到执行阶段。
这样的解决方案,我们就叫作操作数前推(Operand Forwarding),或者操作数旁路(Operand Bypassing)。其实更合适的名字应该叫操作数转发。这里的 Forward,其实就是我们写 Email 时的“转发”(Forward)的意思。不过现有的经典教材的中文翻译一般都叫“前推”,我们也就不去纠正这个说法了,你明白这个意思就好。
转发,其实是这个技术的逻辑含义,也就是在第 1 条指令的执行结果,直接“转发”给了第 2 条指令的 ALU 作为输入。另外一个名字,旁路(Bypassing),则是这个技术的硬件含义。
为了能够实现这里的“转发”,我们在 CPU 的硬件里面,需要再单独拉一根信号传输的线路出来,使得 ALU 的计算结果,能够重新回到 ALU 的输入里来。这样的一条线路,就是我们的“旁路”。它越过(Bypass)了写入寄存器,再从寄存器读出的过程,也为我们节省了 2 个时钟周期。
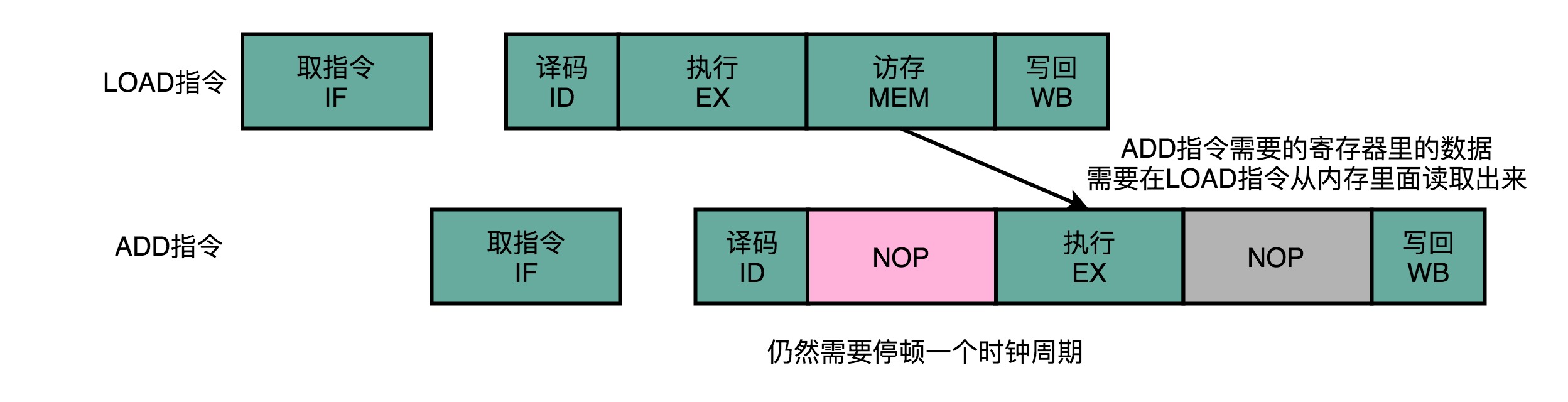
操作数前推的解决方案不但可以单独使用,还可以和流水线冒泡一起使用。有的时候,虽然我们可以把操作数转发到下一条指令,但是下一条指令仍然需要停顿一个时钟周期。
比如说,我们先去执行一条 LOAD 指令,再去执行 ADD 指令。LOAD 指令在访存阶段才能把数据读取出来,所以下一条指令的执行阶段,需要在访存阶段完成之后,才能进行。
总的来说,操作数前推的解决方案,比流水线停顿更进了一步。流水线停顿的方案,有点儿像游泳比赛的接力方式。下一名运动员,需要在前一个运动员游玩了全程之后,触碰到了游泳池壁才能出发。而操作数前推,就好像短跑接力赛。后一个运动员可以提前抢跑,而前一个运动员会多跑一段主动把交接棒传递给他。
填上空闲的 NOP
之前我为你讲解的,无论是流水线停顿,还是操作数前推,归根到底,只要前面指令的特定阶段还没有执行完成,后面的指令就会被“阻塞”住。
但是这个“阻塞”很多时候是没有必要的。因为尽管你的代码生成的指令是顺序的,但是如果后面的指令不需要依赖前面指令的执行结果,完全可以不必等待前面的指令运算完成。
比如说,下面这三行代码。
a = b + c
d = a * e
x = y * z
计算里面的 x ,却要等待 a 和 d 都计算完成,实在没啥必要。所以我们完全可以在 d 的计算等待 a 的计算的过程中,先把 x 的结果给算出来。
在流水线里,后面的指令不依赖前面的指令,那就不用等待前面的指令执行,它完全可以先执行。
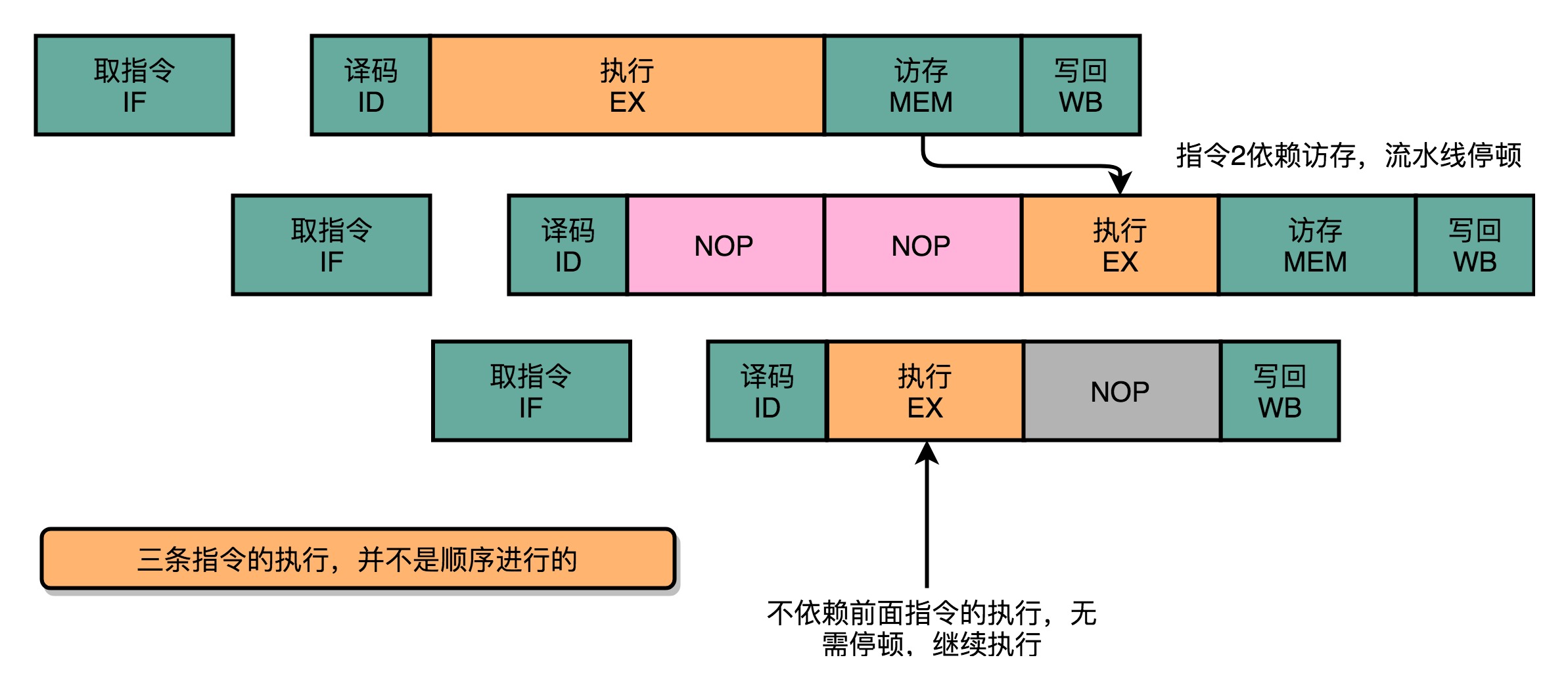
可以看到,因为第三条指令并不依赖于前两条指令的计算结果,所以在第二条指令等待第一条指令的访存和写回阶段的时候,第三条指令就已经执行完成了。
这就好比你开了一家餐馆,顾客会排队来点菜。餐馆的厨房里会有洗菜、切菜、炒菜、上菜这样的各个步骤。后厨也是按照点菜的顺序开始做菜的。但是不同的菜需要花费的时间和工序可能都有差别。有些菜做起来特别麻烦,特别慢。比如做一道佛跳墙有好几道工序。我们没有必要非要等先点的佛跳墙上菜了,再开始做后面的炒鸡蛋。只要有厨子空出来了,就可以先动手做前面的简单菜,先给客户端上去。
这样的解决方案,在计算机组成里面,被称为乱序执行(Out-of-Order Execution,OoOE)。乱序执行,最早来自于著名的 IBM 360。相信你一定听说过《人月神话》这本软件工程届的经典著作,它讲的就是 IBM 360 开发过程中的“人生体会”。而 IBM 360 困难的开发过程,也少不了第一次引入乱序执行这个新的 CPU 技术。
理解乱序执行
那么,我们的 CPU 怎样才能实现乱序执行呢?是不是像玩俄罗斯方块一样,把后面的指令,找一个前面的坑填进去就行了?事情并没有这么简单。其实,从今天软件开发的维度来思考,乱序执行好像是在指令的执行阶段,引入了一个“线程池”。我们下面就来看一看,在 CPU 里,乱序执行的过程究竟是怎样的。
使用乱序执行技术后,CPU 里的流水线就和我之前给你看的 5 级流水线不太一样了。我们一起来看一看下面这张图。

-
在取指令和指令译码的时候,乱序执行的 CPU 和其他使用流水线架构的 CPU 是一样的。它会一级一级顺序地进行取指令和指令译码的工作。
-
在指令译码完成之后,就不一样了。CPU 不会直接进行指令执行,而是进行一次指令分发,把指令发到一个叫作保留站(Reservation Stations)的地方。顾名思义,这个保留站,就像一个火车站一样。发送到车站的指令,就像是一列列的火车。
-
这些指令不会立刻执行,而要等待它们所依赖的数据,传递给它们之后才会执行。这就好像一列列的火车都要等到乘客来齐了才能出发。
-
一旦指令依赖的数据来齐了,指令就可以交到后面的功能单元(Function Unit,FU),其实就是 ALU,去执行了。我们有很多功能单元可以并行运行,但是不同的功能单元能够支持执行的指令并不相同。就和我们的铁轨一样,有些从上海北上,可以到北京和哈尔滨;有些是南下的,可以到广州和深圳。
-
指令执行的阶段完成之后,我们并不能立刻把结果写回到寄存器里面去,而是把结果再存放到一个叫作重排序缓冲区(Re-Order Buffer,ROB)的地方。
-
在重排序缓冲区里,我们的 CPU 会按照取指令的顺序,对指令的计算结果重新排序。只有排在前面的指令都已经完成了,才会提交指令,完成整个指令的运算结果。
-
实际的指令的计算结果数据,并不是直接写到内存或者高速缓存里,而是先写入存储缓冲区(Store Buffer 面,最终才会写入到高速缓存和内存里。
可以看到,在乱序执行的情况下,只有 CPU 内部指令的执行层面,可能是“乱序”的。只要我们能在指令的译码阶段正确地分析出指令之间的数据依赖关系,这个“乱序”就只会在互相没有影响的指令之间发生。
即便指令的执行过程中是乱序的,我们在最终指令的计算结果写入到寄存器和内存之前,依然会进行一次排序,以确保所有指令在外部看来仍然是有序完成的。
有了乱序执行,我们重新去执行上面的 3 行代码。
a = b + c
d = a * e
x = y * z
里面的 d 依赖于 a 的计算结果,不会在 a 的计算完成之前执行。但是我们的 CPU 并不会闲着,因为 x = y * z 的指令同样会被分发到保留站里。因为 x 所依赖的 y 和 z 的数据是准备好的, 这里的乘法运算不会等待计算 d,而会先去计算 x 的值。
如果我们只有一个 FU 能够计算乘法,那么这个 FU 并不会因为 d 要等待 a 的计算结果,而被闲置,而是会先被拿去计算 x。
在 x 计算完成之后,d 也等来了 a 的计算结果。这个时候,我们的 FU 就会去计算出 d 的结果。然后在重排序缓冲区里,把对应的计算结果的提交顺序,仍然设置成 a -> d -> x,而计算完成的顺序是 x -> a -> d。
在这整个过程中,整个计算乘法的 FU 都没有闲置,这也意味着我们的 CPU 的吞吐率最大化了。
整个乱序执行技术,就好像在指令的执行阶段提供一个“线程池”。指令不再是顺序执行的,而是根据池里所拥有的资源,以及各个任务是否可以进行执行,进行动态调度。在执行完成之后,又重新把结果在一个队列里面,按照指令的分发顺序重新排序。即使内部是“乱序”的,但是在外部看起来,仍然是井井有条地顺序执行。
乱序执行,极大地提高了 CPU 的运行效率。核心原因是,现代 CPU 的运行速度比访问主内存的速度要快很多。如果完全采用顺序执行的方式,很多时间都会浪费在前面指令等待获取内存数据的时间里。CPU 不得不加入 NOP 操作进行空转。而现代 CPU 的流水线级数也已经相对比较深了,到达了 14 级。这也意味着,同一个时钟周期内并行执行的指令数是很多的。
而乱序执行,以及我们后面要讲的高速缓存,弥补了 CPU 和内存之间的性能差异。同样,也充分利用了较深的流水行带来的并发性,使得我们可以充分利用 CPU 的性能。
控制冒险
在结构冒险和数据冒险中,你会发现,所有的流水线停顿操作都要从指令执行阶段开始。流水线的前两个阶段,也就是取指令(IF)和指令译码(ID)的阶段,是不需要停顿的。CPU 会在流水线里面直接去取下一条指令,然后进行译码。
取指令和指令译码不会需要遇到任何停顿,这是基于一个假设。这个假设就是,所有的指令代码都是顺序加载执行的。不过这个假设,在执行的代码中,一旦遇到 if…else 这样的条件分支,或者 for/while 循环,就会不成立。
可以看到,在 jmp 指令发生的时候,CPU 可能会跳转去执行其他指令。jmp 后的那一条指令是否应该顺序加载执行,在流水线里面进行取指令的时候,我们没法知道。要等 jmp 指令执行完成,去更新了 PC 寄存器之后,我们才能知道,是否执行下一条指令,还是跳转到另外一个内存地址,去取别的指令。
这种为了确保能取到正确的指令,而不得不进行等待延迟的情况,就是今天我们要讲的控制冒险(Control Harzard)。
分支预测
在遇到了控制冒险之后,我们的 CPU 具体会怎么应对呢?除了流水线停顿,等待前面的 jmp 指令执行完成之后,再去取最新的指令,还有什么好办法吗?当然是有的。我们一起来看一看。
缩短分支延迟
第一个办法,叫作缩短分支延迟。回想一下我们的条件跳转指令,条件跳转指令其实进行了两种电路操作。
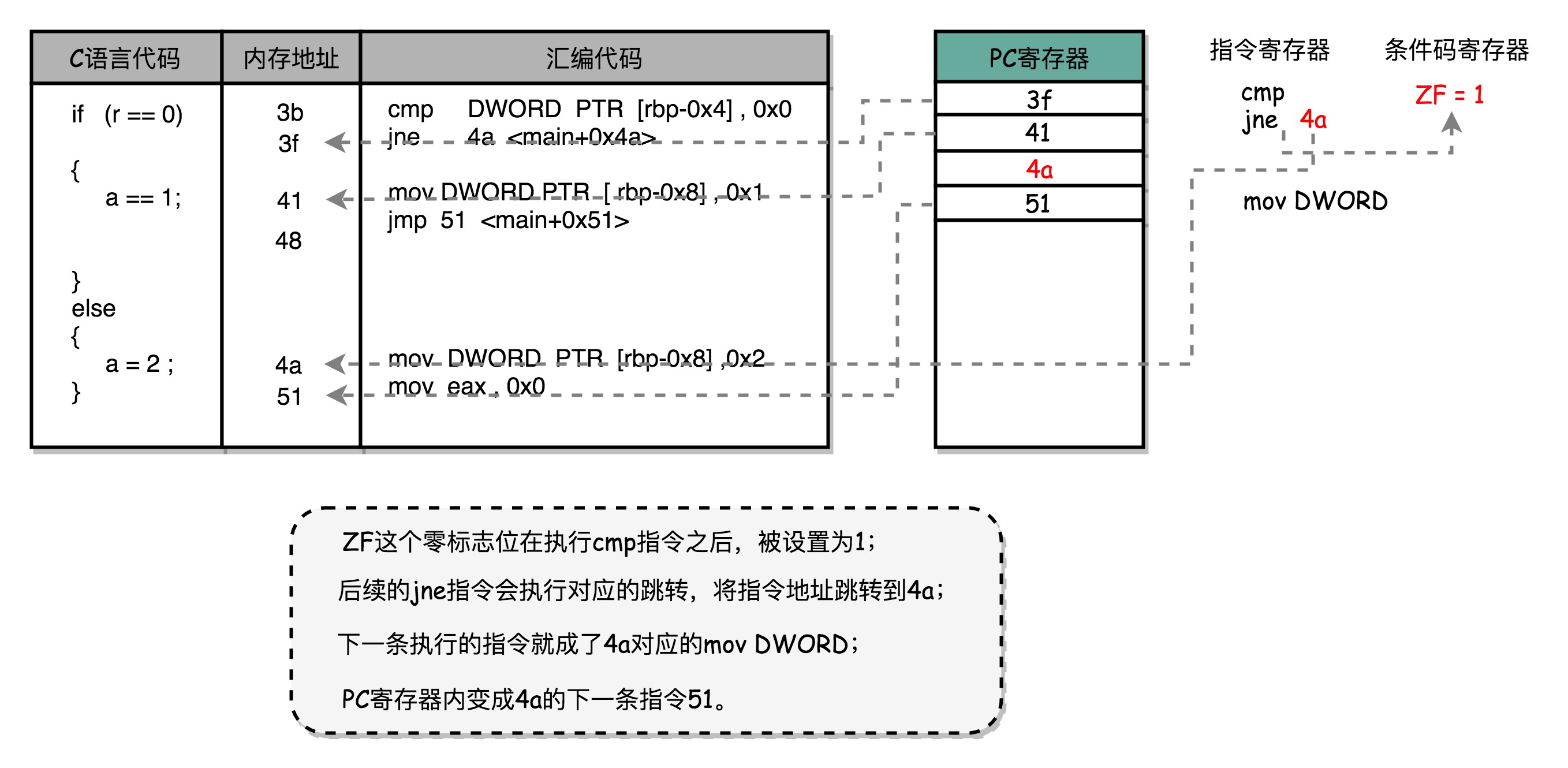
第一种,是进行条件比较。这个条件比较,需要的输入是,根据指令的 opcode,就能确认的条件码寄存器。
第二种,是进行实际的跳转,也就是把要跳转的地址信息写入到 PC 寄存器。无论是 opcode,还是对应的条件码寄存器,还是我们跳转的地址,都是在指令译码(ID)的阶段就能获得的。而对应的条件码比较的电路,只要是简单的逻辑门电路就可以了,并不需要一个完整而复杂的 ALU。
所以,我们可以将条件判断、地址跳转,都提前到指令译码阶段进行,而不需要放在指令执行阶段。对应的,我们也要在 CPU 里面设计对应的旁路,在指令译码阶段,就提供对应的判断比较的电路。
这种方式,本质上和前面数据冒险的操作数前推的解决方案类似,就是在硬件电路层面,把一些计算结果更早地反馈到流水线中。这样反馈变得更快了,后面的指令需要等待的时间就变短了。
不过只是改造硬件,并不能彻底解决问题。跳转指令的比较结果,仍然要在指令执行的时候才能知道。在流水线里,第一条指令进行指令译码的时钟周期里,我们其实就要去取下一条指令了。这个时候,我们其实还没有开始指令执行阶段,自然也就不知道比较的结果。
分支预测
所以,这个时候,我们就引入了一个新的解决方案,叫作分支预测(Branch Prediction)技术,也就是说,让我们的 CPU 来猜一猜,条件跳转后执行的指令,应该是哪一条。
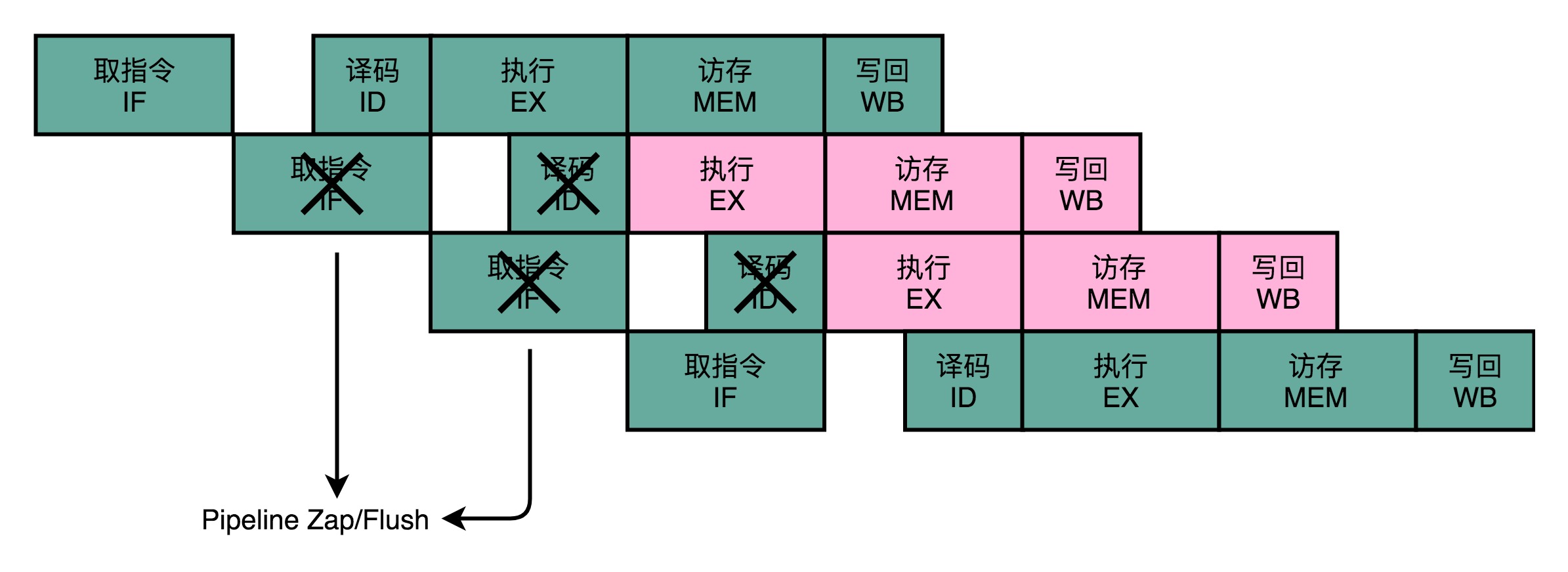
最简单的分支预测技术,叫作“假装分支不发生”。顾名思义,自然就是仍然按照顺序,把指令往下执行。其实就是 CPU 预测,条件跳转一定不发生。这样的预测方法,其实也是一种静态预测技术。就好像猜硬币的时候,你一直猜正面,会有 50% 的正确率。
如果分支预测是正确的,我们自然赚到了。这个意味着,我们节省下来本来需要停顿下来等待的时间。
如果分支预测失败了呢?那我们就把后面已经取出指令已经执行的部分,给丢弃掉。
这个丢弃的操作,在流水线里面,叫作 Zap 或者 Flush。CPU 不仅要执行后面的指令,对于这些已经在流水线里面执行到一半的指令,我们还需要做对应的清除操作。比如,清空已经使用的寄存器里面的数据等等,这些清除操作,也有一定的开销。
所以,CPU 需要提供对应的丢弃指令的功能,通过控制信号清除掉已经在流水线中执行的指令。只要对应的清除开销不要太大,我们就是划得来的。
动态分支预测
第三个办法,叫作动态分支预测。
上面的静态预测策略,看起来比较简单,预测的准确率也许有 50%。但是如果运气不好,可能就会特别差。于是,工程师们就开始思考,我们有没有更好的办法呢?比如,根据之前条件跳转的比较结果来预测,是不是会更准一点?
我们日常生活里,最经常会遇到的预测就是天气预报。如果没有气象台给你天气预报,你想要猜一猜明天是不是下雨,你会怎么办?
有一个简单的策略,就是完全根据今天的天气来猜。如果今天下雨,我们就预测明天下雨。如果今天天晴,就预测明天也不会下雨。这是一个很符合我们日常生活经验的预测。因为一般下雨天,都是连着下几天,不断地间隔地发生“天晴 - 下雨 - 天晴 - 下雨”的情况并不多见。
那么,把这样的实践拿到生活中来是不是有效呢?在这里给了一张 2019 年 1 月上海的天气情况的表格。
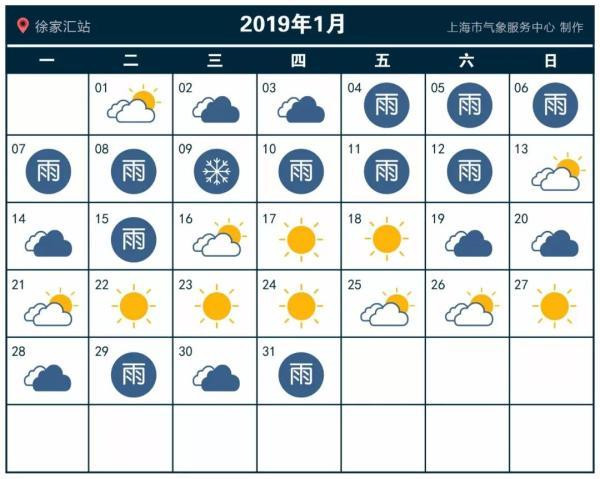
我们用前一天的是不是下雨,直接来预测后一天会不会下雨。这个表格里一共有 31 天,那我们就可以预测 30 次。你可以数一数,按照这种预测方式,我们可以预测正确 23 次,正确率是 76.7%,比随机预测的 50% 要好上不少。
而同样的策略,我们一样可以放在分支预测上。这种策略,我们叫一级分支预测(One Level Branch Prediction),或者叫1 比特饱和计数(1-bit saturating counter)。这个方法,其实就是用一个比特,去记录当前分支的比较情况,直接用当前分支的比较情况,来预测下一次分支时候的比较情况。
只用一天下雨,就预测第二天下雨,这个方法还是有些“草率”,我们可以用更多的信息,而不只是一次的分支信息来进行预测。于是,我们可以引入一个状态机(State Machine)来做这个事情。
如果连续发生下雨的情况,我们就认为更有可能下雨。之后如果只有一天放晴了,我们仍然认为会下雨。在连续下雨之后,要连续两天放晴,我们才会认为之后会放晴。整个状态机的流转,可以参考下面的图。
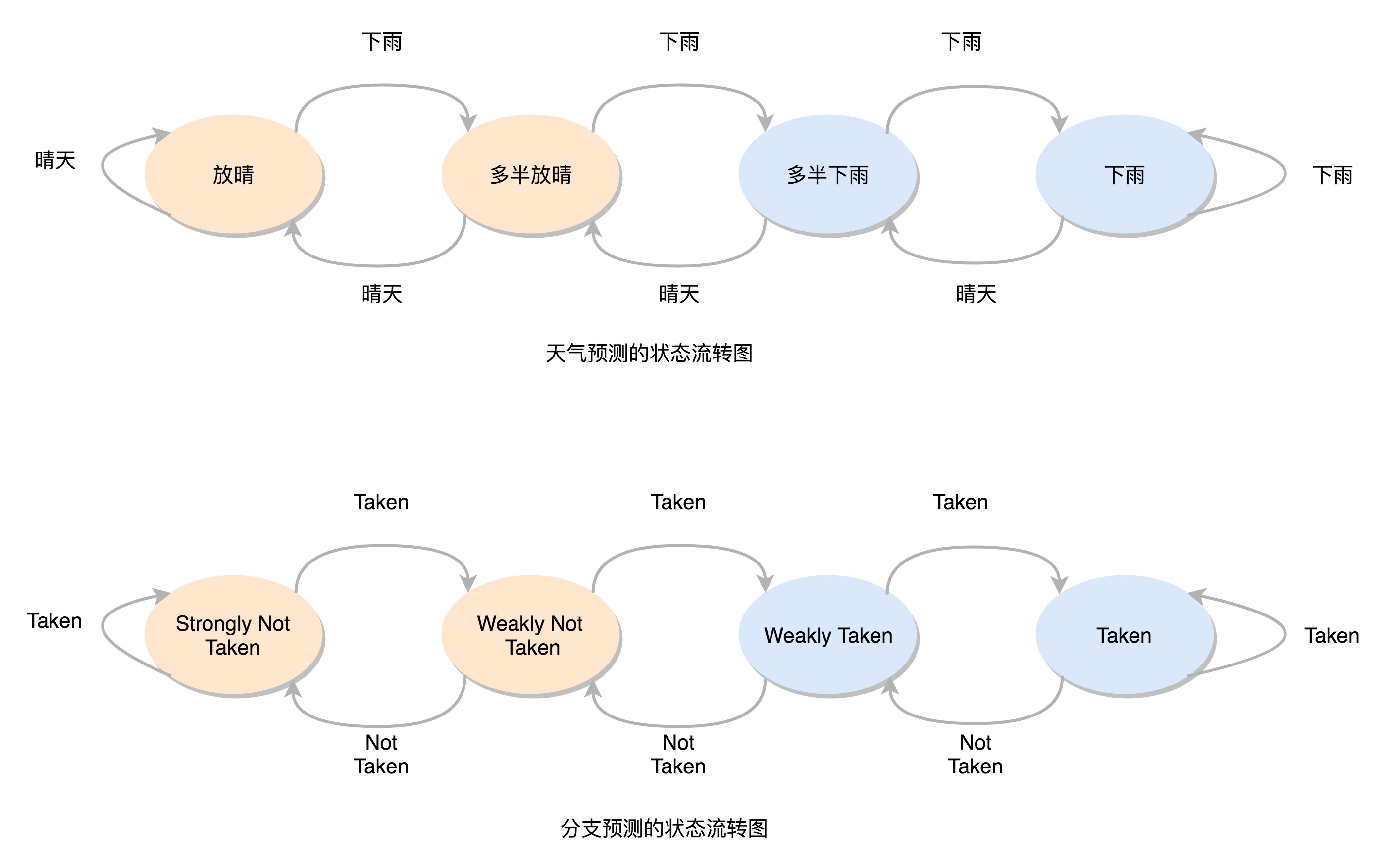
这个状态机里,我们一共有 4 个状态,所以我们需要 2 个比特来记录对应的状态。这样这整个策略,就可以叫作2 比特饱和计数,或者叫双模态预测器(Bimodal Predictor)。
好了,现在你可以用这个策略,再去对照一下上面的天气情况。如果天气的初始状态我们放在“多半放晴”的状态下,我们预测的结果的正确率会是 22 次,也就是 73.3% 的正确率。可以看到,并不是更复杂的算法,效果一定就更好。实际的预测效果,和实际执行的指令高度相关。
如果想对各种分支预测技术有所了解,Wikipedia里面有更详细的内容和更多的分支预测算法,你可以看看。
为什么循环嵌套的改变会影响性能?
说完了分支预测,现在我们先来看一个 Java 程序。
public class BranchPrediction {
public static void main(String args[]) {
long start = System.currentTimeMillis();
for (int i = 0; i < 100; i++) {
for (int j = 0; j <1000; j ++) {
for (int k = 0; k < 10000; k++) {
}
}
}
long end = System.currentTimeMillis();
System.out.println("Time spent is " + (end - start));
start = System.currentTimeMillis();
for (int i = 0; i < 10000; i++) {
for (int j = 0; j <1000; j ++) {
for (int k = 0; k < 100; k++) {
}
}
}
end = System.currentTimeMillis();
System.out.println("Time spent is " + (end - start) + "ms");
}
}
这是一个简单的三重循环,里面没有任何逻辑代码。我们用两种不同的循环顺序各跑一次。
第一次,最外重循环循环了 100 次,第二重循环 1000 次,最内层的循环了 10000 次。
第二次,我们把顺序倒过来,最外重循环 10000 次,第二重还是 1000 次,最内层 100 次。
看看对应的命令行输出
Time spent in first loop is 5ms
Time spent in second loop is 15ms
同样循环了十亿次,第一段程序只花了 5 毫秒,而第二段程序则花了 15 毫秒,足足多了 2 倍。
这个差异就来自我们上面说的分支预测。我们在前面讲过,循环其实也是利用 cmp 和 jle 这样先比较后跳转的指令来实现的。
这里的代码,每一次循环都有一个 cmp 和 jle 指令。每一个 jle 就意味着,要比较条件码寄存器的状态,决定是顺序执行代码,还是要跳转到另外一个地址。也就是说,在每一次循环发生的时候,都会有一次“分支”。
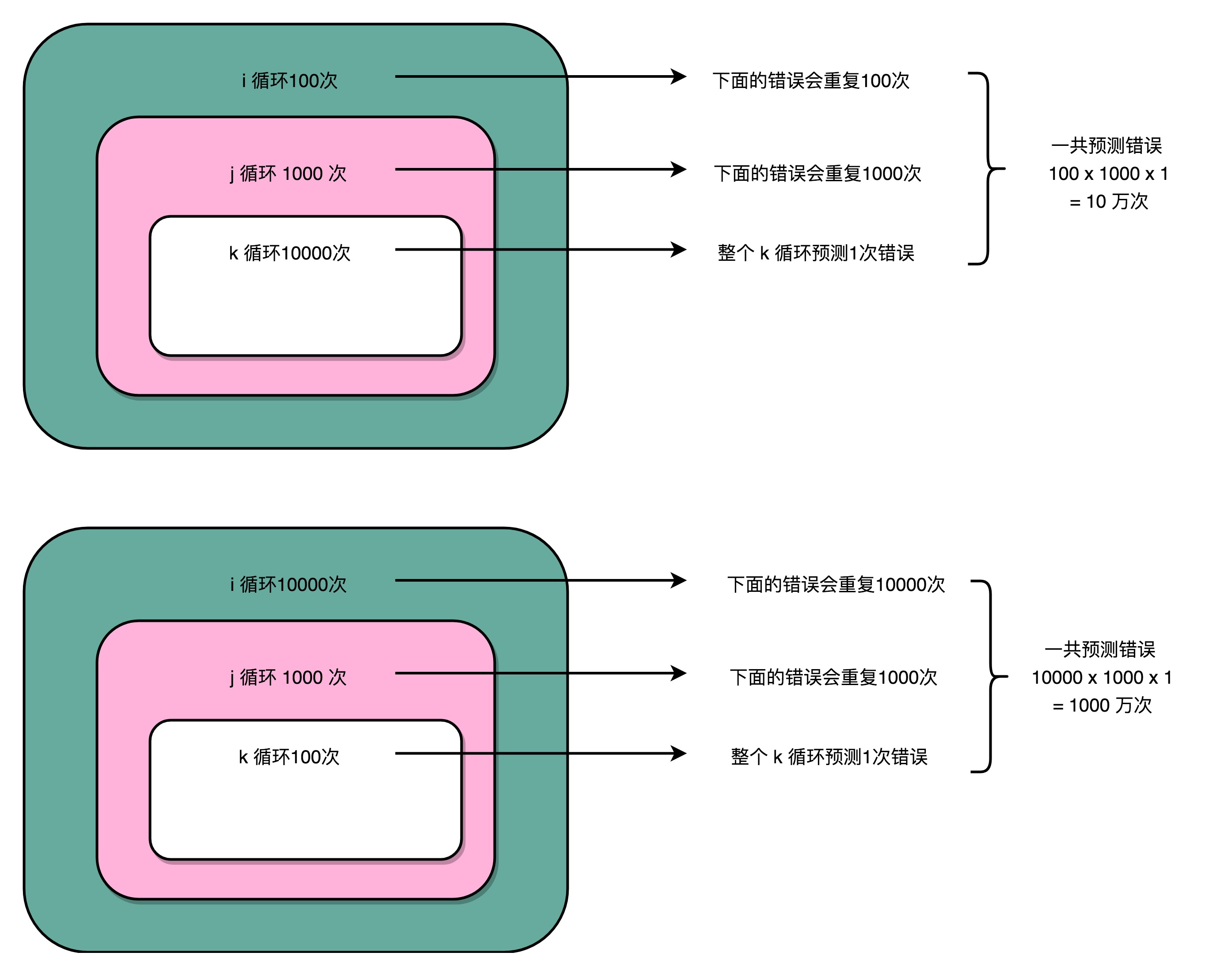
分支预测策略最简单的一个方式,自然是“假定分支不发生”。对应到上面的循环代码,就是循环始终会进行下去。在这样的情况下,上面的第一段循环,也就是内层 k 循环 10000 次的代码。每隔 10000 次,才会发生一次预测上的错误。而这样的错误,在第二层 j 的循环发生的次数,是 1000 次。
最外层的 i 的循环是 100 次。每个外层循环一次里面,都会发生 1000 次最内层 k 的循环的预测错误,所以一共会发生 100 × 1000 = 10 万次预测错误。
上面的第二段循环,也就是内存 k 的循环 100 次的代码,则是每 100 次循环,就会发生一次预测错误。这样的错误,在第二层 j 的循环发生的次数,还是 1000 次。最外层 i 的循环是 10000 次,所以一共会发生 1000 × 10000 = 1000 万次预测错误。
到这里,相信你能猜到为什么同样空转次数相同的循环代码,第一段代码运行的时间要少得多了。因为第一段代码发生“分支预测”错误的情况比较少,更多的计算机指令,在流水线里顺序运行下去了,而不需要把运行到一半的指令丢弃掉,再去重新加载新的指令执行。
总结
- 结构冒险、数据冒险
一方面,我们可以通过增加资源来解决结构冒险问题。我们现代的 CPU 的体系结构,其实也是在冯·诺依曼体系结构下,借鉴哈佛结构的一个混合结构的解决方案。我们的内存虽然没有按照功能拆分,但是在高速缓存层面进行了拆分,也就是拆分成指令缓存和数据缓存这样的方式,从硬件层面,使得同一个时钟下对于相同资源的竞争不再发生。
另一方面,我们也可以通过“等待”,也就是插入无效的 NOP 操作的方式,来解决冒险问题。这就是所谓的流水线停顿。不过,流水线停顿这样的解决方案,是以牺牲 CPU 性能为代价的。因为,实际上在最差的情况下,我们的流水线架构的 CPU,又会退化成单指令周期的 CPU 了。
- 操作数前推
操作数前推,就是通过在硬件层面制造一条旁路,让一条指令的计算结果,可以直接传输给下一条指令,而不再需要“指令 1 写回寄存器,指令 2 再读取寄存器“这样多此一举的操作。这样直接传输带来的好处就是,后面的指令可以减少,甚至消除原本需要通过流水线停顿,才能解决的数据冒险问题。
这个前推的解决方案,不仅可以单独使用,还可以和前面讲解过的流水线冒泡结合在一起使用。因为有些时候,我们的操作数前推并不能减少所有“冒泡”,只能去掉其中的一部分。我们仍然需要通过插入一些“气泡”来解决冒险问题。
- 乱序执行
乱序执行解决流水线阻塞的技术方案。因为数据的依赖关系和指令先后执行的顺序问题,很多时候,流水线不得不“阻塞”在特定的指令上。即使后续别的指令,并不依赖正在执行的指令和阻塞的指令,也不能继续执行。
而乱序执行,则是在指令执行的阶段通过一个类似线程池的保留站,让系统自己去动态调度先执行哪些指令。这个动态调度巧妙地解决了流水线阻塞的问题。指令执行的先后顺序,不再和它们在程序中的顺序有关。我们只要保证不破坏数据依赖就好了。CPU 只要等到在指令结果的最终提交的阶段,再通过重排序的方式,确保指令“实际上”是顺序执行的。
- 对控制冒险的三个方式
第一种方案,类似我们的操作数前推,其实是在改造我们的 CPU 功能,通过增加对应的电路的方式,来缩短分支带来的延迟。另外两种解决方案,无论是“假装分支不发生”,还是“动态分支预测”,其实都是在进行“分支预测”。只是,“假装分支不发生”是一种简单的静态预测方案而已。
在动态分支预测技术里,我给你介绍了一级分支预测,或者叫 1 比特饱和计数的方法。其实就是认为,预测结果和上一次的条件跳转是一致的。在此基础上,我还介绍了利用更多信息的,就是 2 比特饱和计数,或者叫双模态预测器的方法。这个方法其实也只是通过一个状态机,多看了一步过去的跳转比较结果。
Superscalar和VLIW
多发射与超标量
之前讲 CPU 的硬件组成的时候,我们把所有算术和逻辑运算都抽象出来,变成了一个 ALU 这样的“黑盒子”。关于加法器、乘法器、乃至浮点数计算的部分,其实整数的计算和浮点数的计算过程差异还是不小的。实际上,整数和浮点数计算的电路,在 CPU 层面也是分开的。
一直到 80386,我们的 CPU 都是没有专门的浮点数计算的电路的。当时的浮点数计算,都是用软件进行模拟的。所以,在 80386 时代,Intel 给 386 配了单独的 387 芯片,专门用来做浮点数运算。那个时候,你买 386 芯片的话,会有 386sx 和 386dx 这两种芯片可以选择。386dx 就是带了 387 浮点数计算芯片的,而 sx 就是不带浮点数计算芯片的。
其实,我们现在用的 Intel CPU 芯片也是一样的。虽然浮点数计算已经变成 CPU 里的一部分,但并不是所有计算功能都在一个 ALU 里面,真实的情况是,我们会有多个 ALU。这也是为什么,在乱序执行的时候,你会看到,其实指令的执行阶段,是由很多个功能单元(FU)并行(Parallel)进行的。
不过,在指令乱序执行的过程中,我们的取指令(IF)和指令译码(ID)部分并不是并行进行的。
既然指令的执行层面可以并行进行,为什么取指令和指令译码不行呢?如果想要实现并行,该怎么办呢?
其实只要我们把取指令和指令译码,也一样通过增加硬件的方式,并行进行就好了。我们可以一次性从内存里面取出多条指令,然后分发给多个并行的指令译码器,进行译码,然后对应交给不同的功能单元去处理。这样,我们在一个时钟周期里,能够完成的指令就不只一条了。IPC 也就能做到大于 1 了。
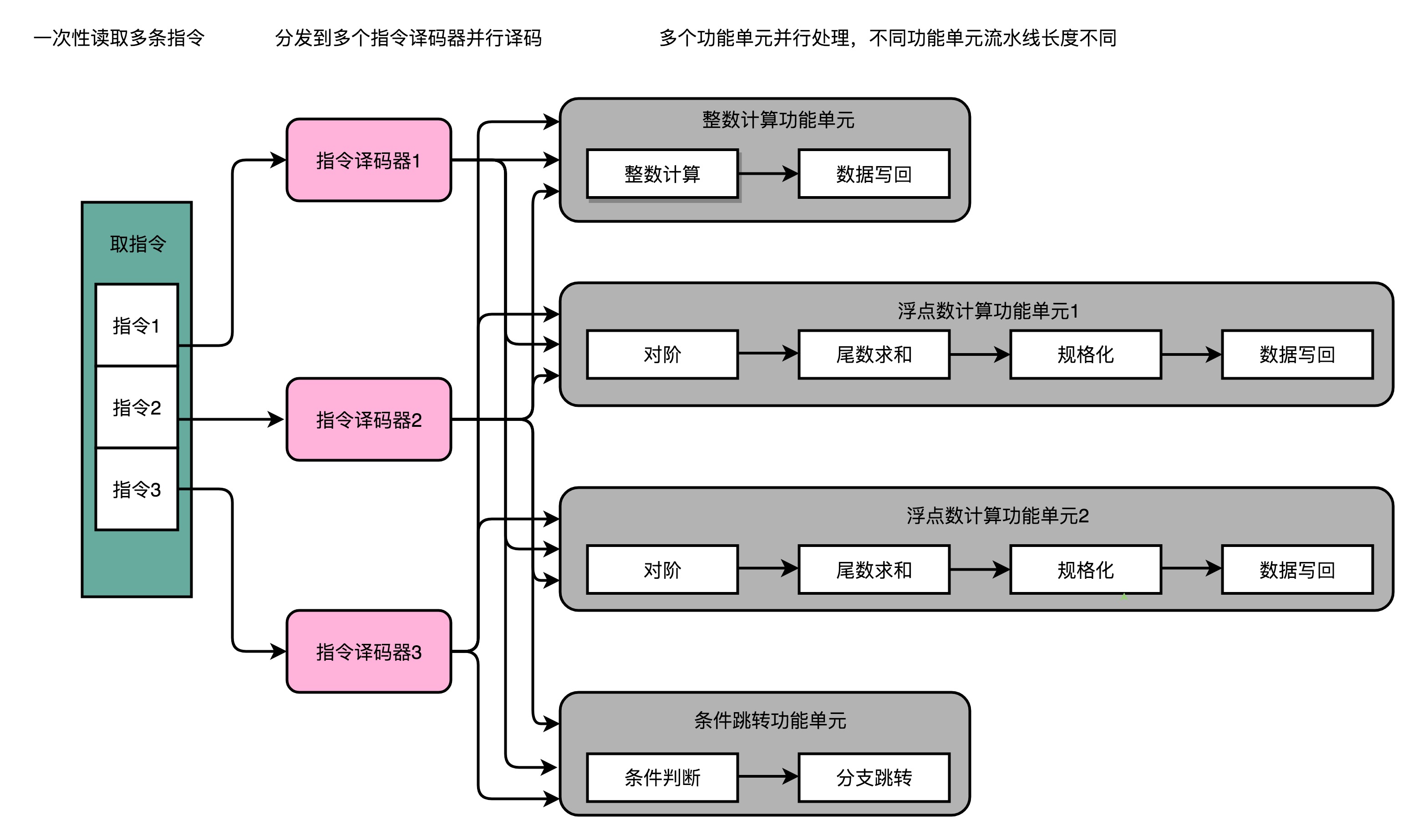
这种 CPU 设计,我们叫作多发射(Mulitple Issue)和超标量(Superscalar)。
什么叫多发射呢?这个词听起来很抽象,其实它意思就是说,我们同一个时间,可能会同时把多条指令发射(Issue)到不同的译码器或者后续处理的流水线中去。
在超标量的 CPU 里面,有很多条并行的流水线,而不是只有一条流水线。“超标量“这个词是说,本来我们在一个时钟周期里面,只能执行一个标量(Scalar)的运算。在多发射的情况下,我们就能够超越这个限制,同时进行多次计算。

你可以看这个超标量设计的流水线示意图。仔细看,你应该能看到一个有意思的现象,每一个功能单元的流水线的长度是不同的。事实上,不同的功能单元的流水线长度本来就不一样。我们平时所说的 14 级流水线,指的通常是进行整数计算指令的流水线长度。如果是浮点数运算,实际的流水线长度则会更长一些。
超长指令字设计
无论是之前几讲里讲的乱序执行,还是现在更进一步的超标量技术,在实际的硬件层面,其实实施起来都挺麻烦的。这是因为,在乱序执行和超标量的体系里面,我们的 CPU 要解决依赖冲突的问题。这也就是前面几讲我们讲的冒险问题。
CPU 需要在指令执行之前,去判断指令之间是否有依赖关系。如果有对应的依赖关系,指令就不能分发到执行阶段。因为这样,上面我们所说的超标量 CPU 的多发射功能,又被称为动态多发射处理器。这些对于依赖关系的检测,都会使得我们的 CPU 电路变得更加复杂。
于是,计算机科学家和工程师们就又有了一个大胆的想法。我们能不能不把分析和解决依赖关系的事情,放在硬件里面,而是放到软件里面来干呢?
要想优化 CPU 的执行时间,关键就是拆解这个公式:
这个公式里面,我们可以通过改进编译器来优化指令数这个指标。那接下来,我们就来看看一个非常大胆的 CPU 设计想法,叫作超长指令字设计(Very Long Instruction Word,VLIW)。这个设计呢,不仅想让编译器来优化指令数,还想直接通过编译器,来优化 CPI。
围绕着这个设计的,是 Intel 一个著名的“史诗级”失败,也就是著名的 IA-64 架构的安腾(Itanium)处理器。只不过,这一次,责任不全在 Intel,还要拉上可以称之为硅谷起源的另一家公司,也就是惠普。
之所以称为“史诗”级失败,这个说法来源于惠普最早给这个架构取的名字,显式并发指令运算(Explicitly Parallel Instruction Computer),这个名字的缩写EPIC,正好是“史诗”的意思。
好巧不巧,安腾处理器和之前给你介绍过的 Pentium 4 一样,在市场上是一个失败的产品。在经历了 12 年之久的设计研发之后,安腾一代只卖出了几千套。而安腾二代,在从 2002 年开始反复挣扎了 16 年之后,最终在 2018 年被 Intel 宣告放弃,退出了市场。自此,世上再也没有这个“史诗”服务器了。
那么,我们就来看看,这个超长指令字的安腾处理器是怎么回事儿。
在乱序执行和超标量的 CPU 架构里,指令的前后依赖关系,是由 CPU 内部的硬件电路来检测的。而到了超长指令字的架构里面,这个工作交给了编译器这个软件。
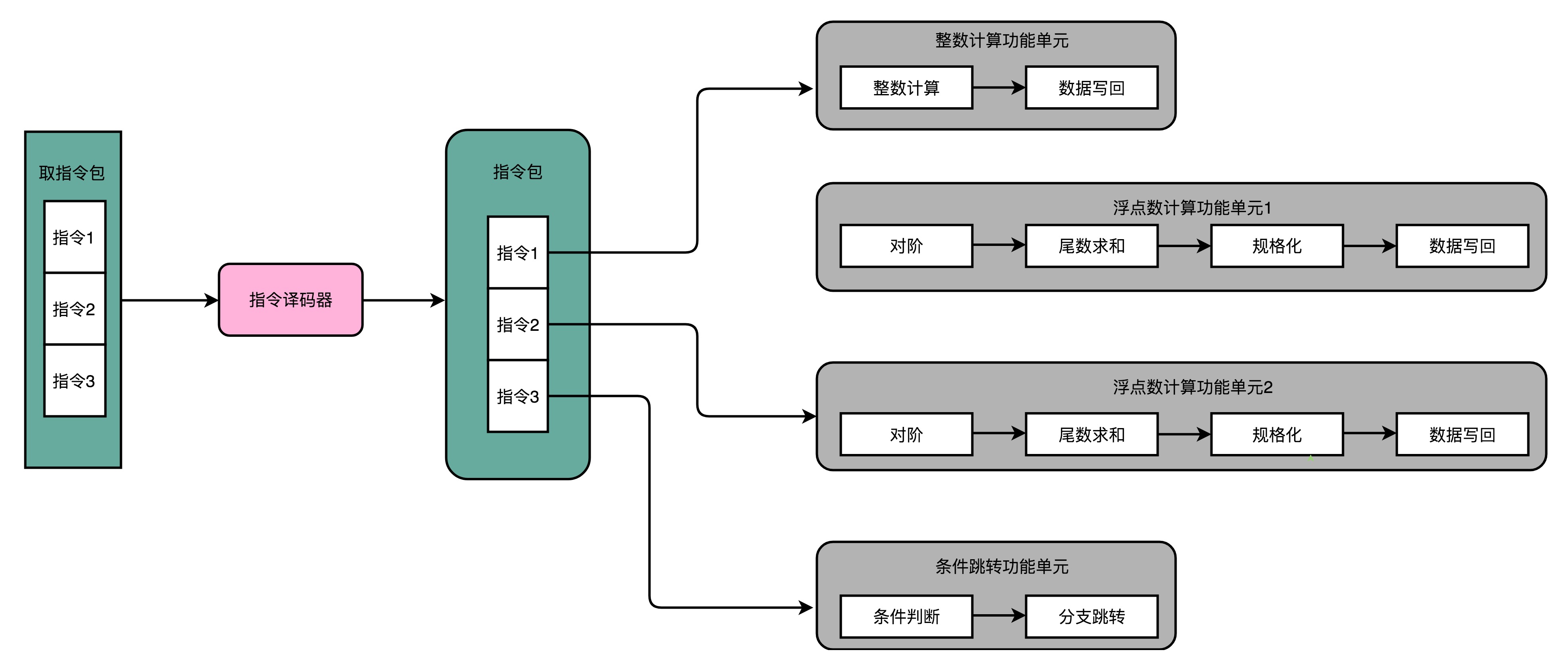
编译器在这个过程中,其实也能够知道前后数据的依赖。于是,我们可以让编译器把没有依赖关系的代码位置进行交换。然后,再把多条连续的指令打包成一个指令包。安腾的 CPU 就是把 3 条指令变成一个指令包。
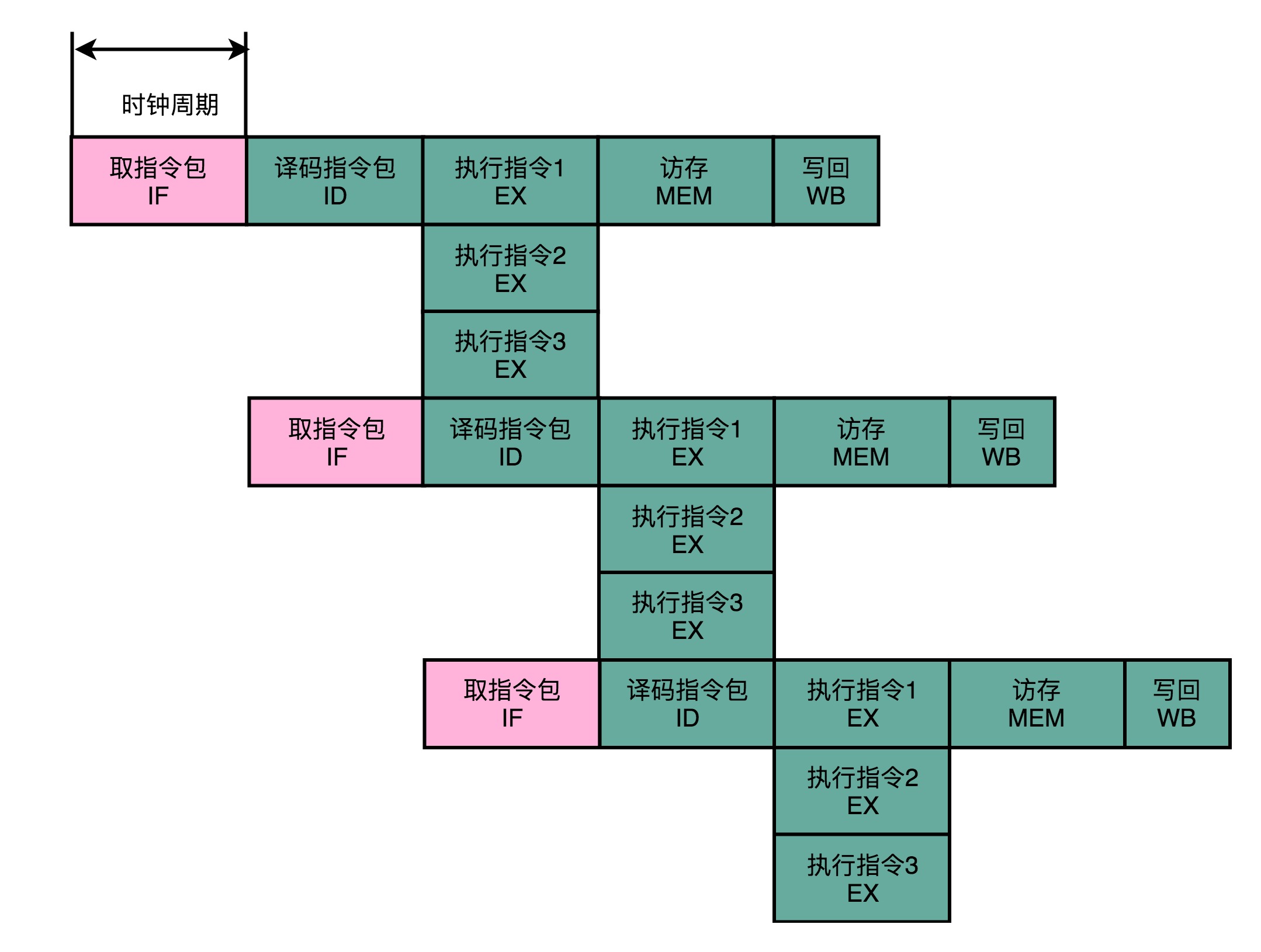
CPU 在运行的时候,不再是取一条指令,而是取出一个指令包。然后,译码解析整个指令包,解析出 3 条指令直接并行运行。可以看到,使用超长指令字架构的 CPU,同样是采用流水线架构的。也就是说,一组(Group)指令,仍然要经历多个时钟周期。同样的,下一组指令并不是等上一组指令执行完成之后再执行,而是在上一组指令的指令译码阶段,就开始取指令了。
值得注意的一点是,流水线停顿这件事情在超长指令字里面,很多时候也是由编译器来做的。除了停下整个处理器流水线,超长指令字的 CPU 不能在某个时钟周期停顿一下,等待前面依赖的操作执行完成。编译器需要在适当的位置插入 NOP 操作,直接在编译出来的机器码里面,就把流水线停顿这个事情在软件层面就安排妥当。
虽然安腾的设想很美好,Intel 也曾经希望能够让安腾架构成为替代 x86 的新一代架构,但是最终安腾还是在前前后后折腾将近 30 年后失败了。2018 年,Intel 宣告安腾 9500 会在 2021 年停止供货。
安腾失败的原因有很多,其中有一个重要的原因就是“向前兼容”。
一方面,安腾处理器的指令集和 x86 是不同的。这就意味着,原来 x86 上的所有程序是没有办法在安腾上运行的,而需要通过编译器重新编译才行。
另一方面,安腾处理器的 VLIW 架构决定了,如果安腾需要提升并行度,就需要增加一个指令包里包含的指令数量,比方说从 3 个变成 6 个。一旦这么做了,虽然同样是 VLIW 架构,同样指令集的安腾 CPU,程序也需要重新编译。因为原来编译器判断的依赖关系是在 3 个指令以及由 3 个指令组成的指令包之间,现在要变成 6 个指令和 6 个指令组成的指令包。编译器需要重新编译,交换指令顺序以及 NOP 操作,才能满足条件。甚至,我们需要重新来写编译器,才能让程序在新的 CPU 上跑起来。
于是,安腾就变成了一个既不容易向前兼容,又不容易向后兼容的 CPU。那么,它的失败也就不足为奇了。
可以看到,技术思路上的先进想法,在实际的业界应用上会遇到更多具体的实践考验。无论是指令集向前兼容性,还是对应 CPU 未来的扩展,在设计的时候,都需要更多地去考虑实践因素。
总结
让 CPU 的吞吐率,也就是 IPC 能够超过 1。
先是介绍了超标量,也就是 Superscalar 这个方法。超标量可以让 CPU 不仅在指令执行阶段是并行的,在取指令和指令译码的时候,也是并行的。通过超标量技术,可以使得你所使用的 CPU 的 IPC 超过 1。
在 Intel 的 x86 的 CPU 里,从 Pentium 时代,第一次开始引入超标量技术,整个 CPU 的性能上了一个台阶。对应的技术,一直沿用到了现在。超标量技术和你之前看到的其他流水线技术一样,依赖于在硬件层面,能够检测到对应的指令的先后依赖关系,解决“冒险”问题。所以,它也使得 CPU 的电路变得更复杂了。
因为这些复杂性,惠普和 Intel 又共同推出了著名的安腾处理器。通过在编译器层面,直接分析出指令的前后依赖关系。于是,硬件在代码编译之后,就可以直接拿到调换好先后顺序的指令。并且这些指令中,可以并行执行的部分,会打包在一起组成一个指令包。安腾处理器在取指令和指令译码的时候,拿到的不再是单个指令,而是这样一个指令包。并且在指令执行阶段,可以并行执行指令包里所有的指令。
虽然看起来,VLIW 在技术层面更具有颠覆性,不仅仅只是一个硬件层面的改造,而且利用了软件层面的编译器,来组合解决提升 CPU 指令吞吐率的问题。然而,最终 VLIW 却没有得到市场和业界的认可。
惠普和 Intel 强强联合开发的安腾处理器命运多舛。从 1989 开始研发,直到 2001 年才发布了第一代安腾处理器。然而 12 年的开发过程后,第一代安腾处理器最终只卖出了几千套。而 2002 年发布的安腾 2 处理器,也没能拯救自己的命运。最终在 2018 年,Intel 宣布安腾退出市场。自此之后,市面上再没有能够大规模商用的 VLIW 架构的处理器了。
超线程和SIMD
超线程
Pentium 4 失败的一个重要原因,就是它的 CPU 的流水线级数太深了。早期的 Pentium 4 的流水线深度高达 20 级,而后期的代号为 Prescott 的 Pentium 4 的流水线级数,更是到了 31 级。超长的流水线,使得之前我们讲的很多解决“冒险”、提升并发的方案都用不上。
因为这些解决“冒险”、提升并发的方案,本质上都是一种指令级并行(Instruction-level parallelism,简称 IPL)的技术方案。换句话说就是,CPU 想要在同一个时间,去并行地执行两条指令。而这两条指令呢,原本在我们的代码里,是有先后顺序的。无论是我们在流水线里面讲到的流水线架构、分支预测以及乱序执行,还是我们在上一讲说的超标量和超长指令字,都是想要通过同一时间执行两条指令,来提升 CPU 的吞吐率。
然而在 Pentium 4 这个 CPU 上,这些方法都可能因为流水线太深,而起不到效果。我之前讲过,更深的流水线意味着同时在流水线里面的指令就多,相互的依赖关系就多。于是,很多时候我们不得不把流水线停顿下来,插入很多 NOP 操作,来解决这些依赖带来的“冒险”问题。
不知道是不是因为当时面临的竞争太激烈了,为了让 Pentium 4 的 CPU 在性能上更有竞争力一点,2002 年底,Intel 在的 3.06GHz 主频的 Pentium 4 CPU 上,第一次引入了超线程(Hyper-Threading)技术。
什么是超线程技术呢?
Intel 想,既然 CPU 同时运行那些在代码层面有前后依赖关系的指令,会遇到各种冒险问题,我们不如去找一些和这些指令完全独立,没有依赖关系的指令来运行好了。那么,这样的指令哪里来呢?自然同时运行在另外一个程序里了。
你所用的计算机,其实同一个时间可以运行很多个程序。比如,现在一边在浏览器里写文章,后台同样运行着一个 Python 脚本程序。而这两个程序,是完全相互独立的。它们两个的指令完全并行运行,而不会产生依赖问题带来的“冒险”。
然而这个时候,你可能就会觉得奇怪了,这么做似乎不需要什么新技术呀。现在我们用的 CPU 都是多核的,本来就可以用多个不同的 CPU 核心,去运行不同的任务。即使当时的 Pentium 4 是单核的,我们的计算机本来也能同时运行多个进程,或者多个线程。这个超线程技术有什么特别的用处呢?
无论是上面说的多个 CPU 核心运行不同的程序,还是在单个 CPU 核心里面切换运行不同线程的任务,在同一时间点上,一个物理的 CPU 核心只会运行一个线程的指令,所以其实我们并没有真正地做到指令的并行运行。
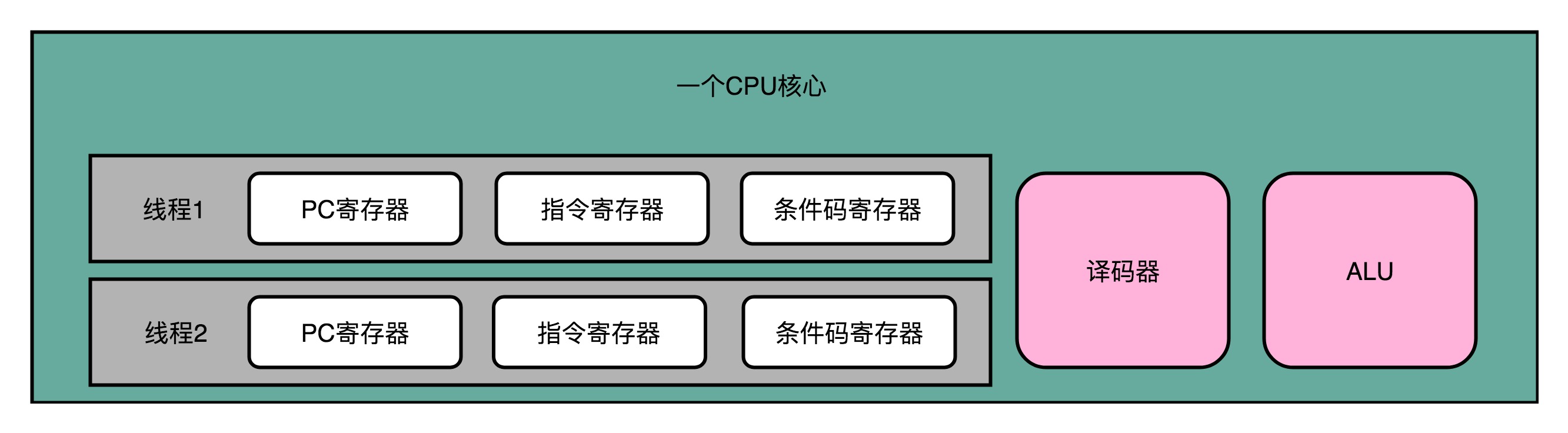
超线程可不是这样。超线程的 CPU,其实是把一个物理层面 CPU 核心,“伪装”成两个逻辑层面的 CPU 核心。这个 CPU,会在硬件层面增加很多电路,使得我们可以在一个 CPU 核心内部,维护两个不同线程的指令的状态信息。
比如,在一个物理 CPU 核心内部,会有双份的 PC 寄存器、指令寄存器乃至条件码寄存器。这样,这个 CPU 核心就可以维护两条并行的指令的状态。在外面看起来,似乎有两个逻辑层面的 CPU 在同时运行。所以,超线程技术一般也被叫作同时多线程(Simultaneous Multi-Threading,简称 SMT)技术。
不过,在 CPU 的其他功能组件上,Intel 可不会提供双份。无论是指令译码器还是 ALU,一个 CPU 核心仍然只有一份。因为超线程并不是真的去同时运行两个指令,那就真的变成物理多核了。超线程的目的,是在一个线程 A 的指令,在流水线里停顿的时候,让另外一个线程去执行指令。因为这个时候,CPU 的译码器和 ALU 就空出来了,那么另外一个线程 B,就可以拿来干自己需要的事情。这个线程 B 可没有对于线程 A 里面指令的关联和依赖。
这样,CPU 通过很小的代价,就能实现“同时”运行多个线程的效果。通常我们只要在 CPU 核心的添加 10% 左右的逻辑功能,增加可以忽略不计的晶体管数量,就能做到这一点。
不过,你也看到了,我们并没有增加真的功能单元。所以超线程只在特定的应用场景下效果比较好。一般是在那些各个线程“等待”时间比较长的应用场景下。比如,我们需要应对很多请求的数据库应用,就很适合使用超线程。各个指令都要等待访问内存数据,但是并不需要做太多计算。
于是,我们就可以利用好超线程。我们的 CPU 计算并没有跑满,但是往往当前的指令要停顿在流水线上,等待内存里面的数据返回。这个时候,让 CPU 里的各个功能单元,去处理另外一个数据库连接的查询请求就是一个很好的应用案例。
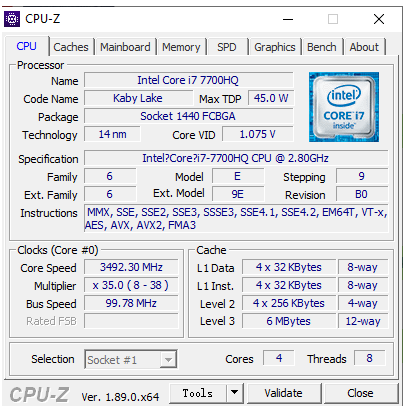
我这里放了一张电脑里运行 CPU-Z 的截图。你可以看到,在右下角里,我的 CPU 的 Cores,被标明了是 4,而 Threads,则是 8。这说明我手头的这个 CPU,只有 4 个物理的 CPU 核心,也就是所谓的 4 核 CPU。但是在逻辑层面,它“装作”有 8 个 CPU 核心,可以利用超线程技术,来同时运行 8 条指令。如果你用的是 Windows,可以去下载安装一个CPU-Z来看看你手头的 CPU 里面对应的参数。
SIMD
在上面的 CPU 信息的图里面,你会看到,中间有一组信息叫作 Instructions,里面写了有 MMX、SSE 等等。这些信息就是这个 CPU 所支持的指令集。这里的 MMX 和 SSE 的指令集,也就引出了我要给你讲的最后一个提升 CPU 性能的技术方案,SIMD,中文叫作单指令多数据流(Single Instruction Multiple Data)。
我们先来体会一下 SIMD 的性能到底怎么样。下面是两段示例程序,一段呢,是通过循环的方式,给一个 list 里面的每一个数加 1。另一段呢,是实现相同的功能,但是直接调用 NumPy 这个库的 add 方法。在统计两段程序的性能的时候,我直接调用了 Python 里面的 timeit 的库。
$ python
>>> import numpy as np
>>> import timeit
>>> a = list(range(1000))
>>> b = np.array(range(1000))
>>> timeit.timeit("[i + 1 for i in a]", setup="from __main__ import a", number=1000000)
32.82800309999993
>>> timeit.timeit("np.add(1, b)", setup="from __main__ import np, b", number=1000000)
0.9787889999997788
>>>
从两段程序的输出结果来看,你会发现,两个功能相同的代码性能有着巨大的差异,足足差出了 30 多倍。也难怪所有用 Python 讲解数据科学的教程里,往往在一开始就告诉你不要使用循环,而要把所有的计算都向量化(Vectorize)。
有些同学可能会猜测,是不是因为 Python 是一门解释性的语言,所以这个性能差异会那么大。
第一段程序的循环的每一次操作都需要 Python 解释器来执行,而第二段的函数调用是一次调用编译好的原生代码,所以才会那么快。
如果你这么想,不妨试试直接用 C 语言实现一下 1000 个元素的数组里面的每个数加 1。
你会发现,即使是 C 语言编译出来的代码,还是远远低于 NumPy。原因就是,NumPy 直接用到了 SIMD 指令,能够并行进行向量的操作。
而前面使用循环来一步一步计算的算法呢,一般被称为SISD,也就是单指令单数据(Single Instruction Single Data)的处理方式。
如果你手头的是一个多核 CPU 呢,那么它同时处理多个指令的方式可以叫作MIMD,也就是多指令多数据(Multiple Instruction Multiple Dataa)。
为什么 SIMD 指令能快那么多呢?
这是因为,SIMD 在获取数据和执行指令的时候,都做到了并行。一方面,在从内存里面读取数据的时候,SIMD 是一次性读取多个数据。
就以我们上面的程序为例,数组里面的每一项都是一个 integer,也就是需要 4 Bytes 的内存空间。Intel 在引入 SSE 指令集的时候,在 CPU 里面添上了 8 个 128 Bits 的寄存器。128 Bits 也就是 16 Bytes ,也就是说,一个寄存器一次性可以加载 4 个整数。比起循环分别读取 4 次对应的数据,时间就省下来了。
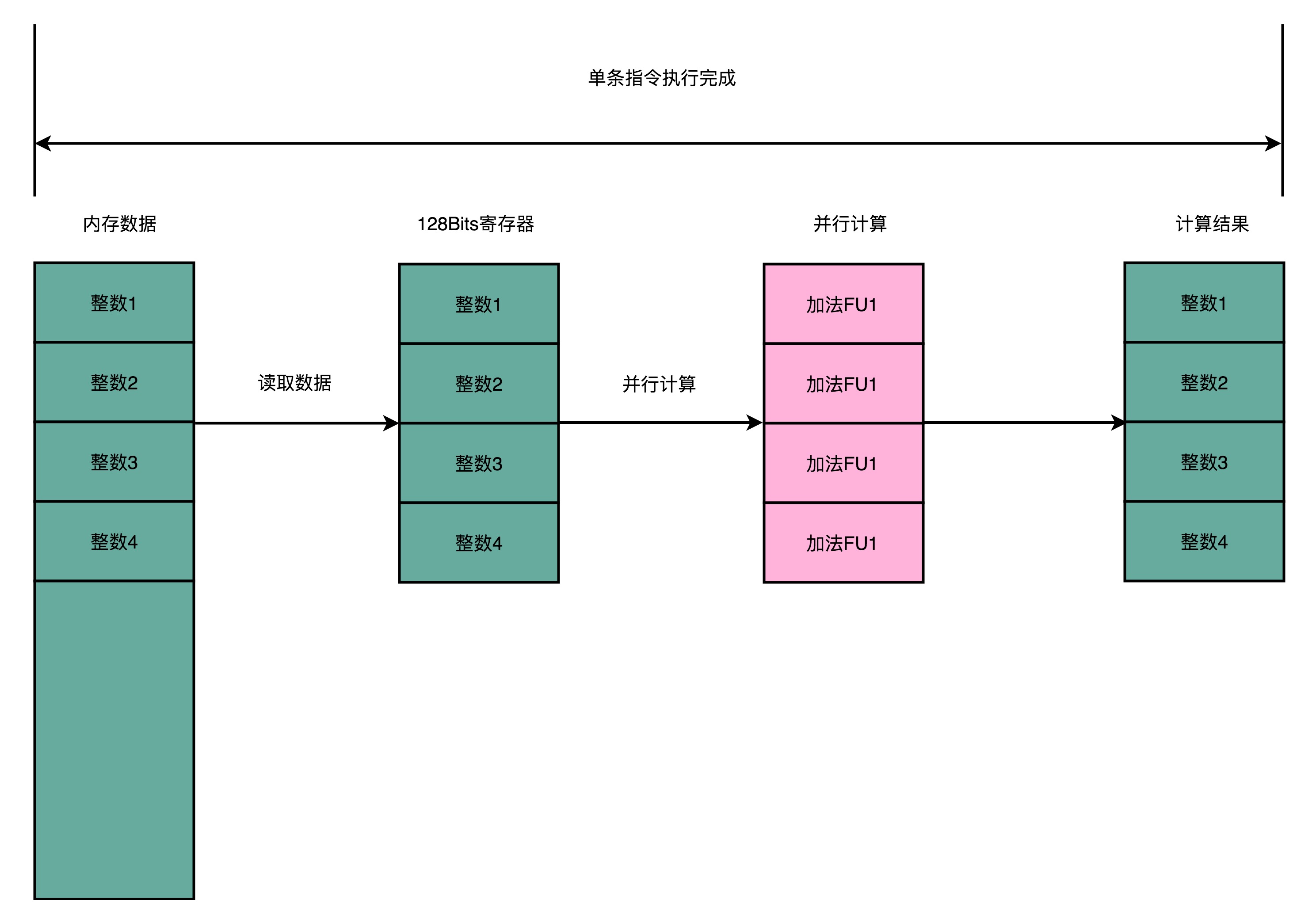
在数据读取到了之后,在指令的执行层面,SIMD 也是可以并行进行的。4 个整数各自加 1,互相之前完全没有依赖,也就没有冒险问题需要处理。只要 CPU 里有足够多的功能单元,能够同时进行这些计算,这个加法就是 4 路同时并行的,自然也省下了时间。
所以,对于那些在计算层面存在大量“数据并行”(Data Parallelism)的计算中,使用 SIMD 是一个很划算的办法。在这个大量的“数据并行”,其实通常就是实践当中的向量运算或者矩阵运算。在实际的程序开发过程中,过去通常是在进行图片、视频、音频的处理。最近几年则通常是在进行各种机器学习算法的计算。
而基于 SIMD 的向量计算指令,也正是在 Intel 发布 Pentium 处理器的时候,被引入的指令集。当时的指令集叫作MMX,也就是 Matrix Math eXtensions 的缩写,中文名字就是矩阵数学扩展。而 Pentium 处理器,也是 CPU 第一次有能力进行多媒体处理。这也正是拜 SIMD 和 MMX 所赐。
从 Pentium 时代开始,我们能在电脑上听 MP3、看 VCD 了,而不用专门去买一块“声霸卡”或者“显霸卡”了。没错,在那之前,在电脑上看 VCD,是需要专门买能够解码 VCD 的硬件插到电脑上去的。而到了今天,通过 GPU 快速发展起来的深度学习技术,也一样受益于 SIMD 这样的指令级并行方案。
总结
超线程,其实是一个“线程级并行”的解决方案。它通过让一个物理 CPU 核心,“装作”两个逻辑层面的 CPU 核心,使得 CPU 可以同时运行两个不同线程的指令。虽然,这样的运行仍然有着种种的限制,很多场景下超线程并不一定能带来 CPU 的性能提升。但是 Intel 通过超线程,让使用者有了“占到便宜”的感觉。同样的 4 核心的 CPU,在有些情况下能够发挥出 8 核心 CPU 的作用。而超线程在今天,也已经成为 Intel CPU 的标配了。
而 SIMD 技术,则是一种“指令级并行”的加速方案,或者我们可以说,它是一种“数据并行”的加速方案。在处理向量计算的情况下,同一个向量的不同维度之间的计算是相互独立的。而我们的 CPU 里的寄存器,又能放得下多条数据。于是,我们可以一次性取出多条数据,交给 CPU 并行计算。
正是 SIMD 技术的出现,使得我们在 Pentium 时代的个人 PC,开始有了多媒体运算的能力。可以说,Intel 的 MMX、SSE 指令集,和微软的 Windows 95 这样的图形界面操作系统,推动了 PC 快速进入家庭的历史进程。
异常和中断
异常
一提到计算机当中的异常(Exception),可能你的第一反应就是 C++ 或者 Java 中的 Exception。不过我们今天讲的,并不是这些软件开发过程中遇到的“软件异常”,而是和硬件、系统相关的“硬件异常”。
当然,“软件异常”和“硬件异常”并不是实际业界使用的专有名词,只是为了方便给你说明,和 C++、Java 中软件抛出的 Exception 进行的人为区分。
尽管,这里我把这些硬件和系统相关的异常,叫作“硬件异常”。但是,实际上,这些异常,既有来自硬件的,也有来自软件层面的。
比如,我们在硬件层面,当加法器进行两个数相加的时候,会遇到算术溢出;或者,你在玩游戏的时候,按下键盘发送了一个信号给到 CPU,CPU 要去执行一个现有流程之外的指令,这也是一个“异常”。
同样,来自软件层面的,比如我们的程序进行系统调用,发起一个读文件的请求。这样应用程序向系统调用发起请求的情况,一样是通过“异常”来实现的。
关于异常,最有意思的一点就是,它其实是一个硬件和软件组合到一起的处理过程。异常的前半生,也就是异常的发生和捕捉,是在硬件层面完成的。但是异常的后半生,也就是说,异常的处理,其实是由软件来完成的。
计算机会为每一种可能会发生的异常,分配一个异常代码(Exception Number)。有些教科书会把异常代码叫作中断向量(Interrupt Vector)。异常发生的时候,通常是 CPU 检测到了一个特殊的信号。
比如,你按下键盘上的按键,输入设备就会给 CPU 发一个信号。或者,正在执行的指令发生了加法溢出,同样,我们可以有一个进位溢出的信号。这些信号呢,在组成原理里面,我们一般叫作发生了一个事件(Event)。CPU 在检测到事件的时候,其实也就拿到了对应的异常代码。
这些异常代码里,I/O 发出的信号的异常代码,是由操作系统来分配的,也就是由软件来设定的。而像加法溢出这样的异常代码,则是由 CPU 预先分配好的,也就是由硬件来分配的。这又是另一个软件和硬件共同组合来处理异常的过程。
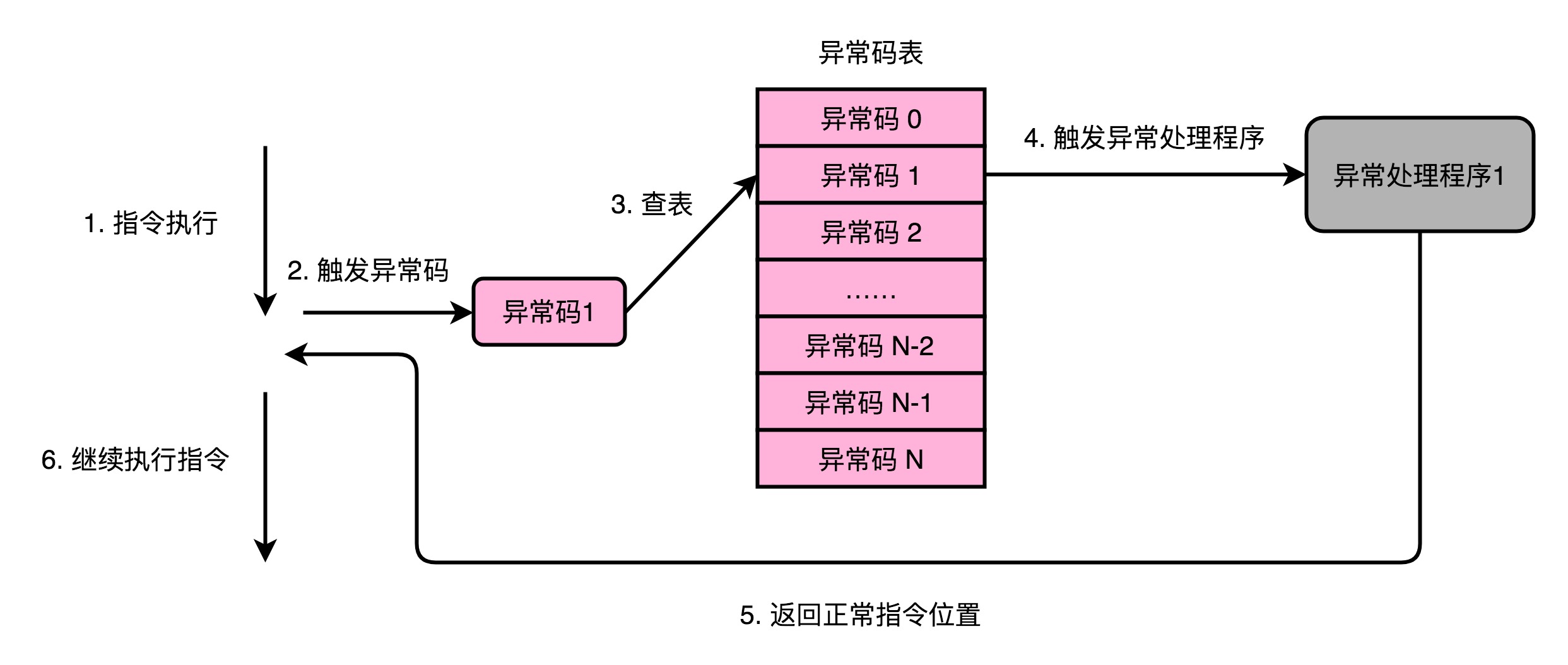
拿到异常代码之后,CPU 就会触发异常处理的流程。计算机在内存里,会保留一个异常表(Exception Table)。也有地方,把这个表叫作中断向量表(Interrupt Vector Table),好和上面的中断向量对应起来。这个异常表有点儿像我们之前讲的 GOT 表,存放的是不同的异常代码对应的异常处理程序(Exception Handler)所在的地址。
我们的 CPU 在拿到了异常码之后,会先把当前的程序执行的现场,保存到程序栈里面,然后根据异常码查询,找到对应的异常处理程序,最后把后续指令执行的指挥权,交给这个异常处理程序。
这样“检测异常,拿到异常码,再根据异常码进行查表处理”的模式,在日常开发的过程中是很常见的。
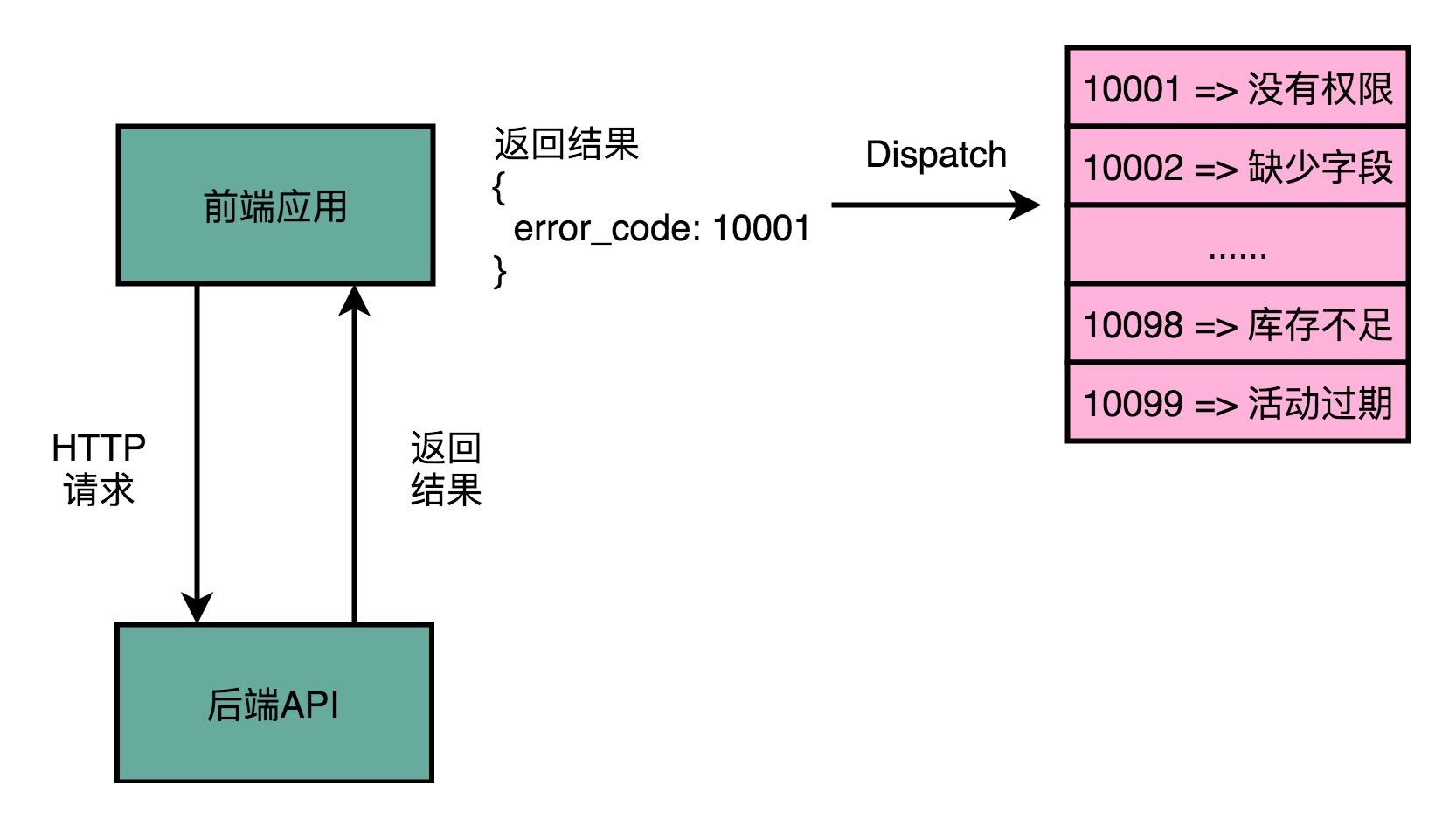
比如说,现在我们日常进行的 Web 或者 App 开发,通常都是前后端分离的。前端的应用,会向后端发起 HTTP 的请求。当后端遇到了异常,通常会给到前端一个对应的错误代码。前端的应用根据这个错误代码,在应用层面去进行错误处理。在不能处理的时候,它会根据错误代码向用户显示错误信息。
public class LastChanceHandler implements Thread.UncaughtExceptionHandler {
@Override
public void uncaughtException(Thread t, Throwable e) {
// do something here - log to file and upload to server/close resources/delete files...
}
}
Thread.setDefaultUncaughtExceptionHandler(new LastChanceHandler());
Java 里面,可以设定 ExceptionHandler,来处理线程执行中的异常情况
再比如说,Java 里面,我们使用一个线程池去运行调度任务的时候,可以指定一个异常处理程序。对于各个线程在执行任务出现的异常情况,我们是通过异常处理程序进行处理,而不是在实际的任务代码里处理。这样,我们就把业务处理代码就和异常处理代码的流程分开了。
异常的分类
我在前面说了,异常可以由硬件触发,也可以由软件触发。那我们平时会碰到哪些异常呢?
第一种异常叫中断(Interrupt)。顾名思义,自然就是程序在执行到一半的时候,被打断了。这个打断执行的信号,来自于 CPU 外部的 I/O 设备。你在键盘上按下一个按键,就会对应触发一个相应的信号到达 CPU 里面。CPU 里面某个开关的值发生了变化,也就触发了一个中断类型的异常。
第二种异常叫陷阱(Trap)。陷阱,其实是我们程序员“故意“主动触发的异常。就好像你在程序里面打了一个断点,这个断点就是设下的一个"陷阱"。当程序的指令执行到这个位置的时候,就掉到了这个陷阱当中。然后,对应的异常处理程序就会来处理这个"陷阱"当中的猎物。
最常见的一类陷阱,发生在我们的应用程序调用系统调用的时候,也就是从程序的用户态切换到内核态的时候。我们之前讲 CPU 性能的时候说过,可以用 Linux 下的 time 指令,去查看一个程序运行实际花费的时间,里面有在用户态花费的时间(user time),也有在内核态发生的时间(system time)。
我们的应用程序通过系统调用去读取文件、创建进程,其实也是通过触发一次陷阱来进行的。这是因为,我们用户态的应用程序没有权限来做这些事情,需要把对应的流程转交给有权限的异常处理程序来进行。
第三种异常叫故障(Fault)。它和陷阱的区别在于,陷阱是我们开发程序的时候刻意触发的异常,而故障通常不是。比如,我们在程序执行的过程中,进行加法计算发生了溢出,其实就是故障类型的异常。这个异常不是我们在开发的时候计划内的,也一样需要有对应的异常处理程序去处理。
故障和陷阱、中断的一个重要区别是,故障在异常程序处理完成之后,仍然回来处理当前的指令,而不是去执行程序中的下一条指令。因为当前的指令因为故障的原因并没有成功执行完成。
最后一种异常叫中止(Abort)。与其说这是一种异常类型,不如说这是故障的一种特殊情况。当 CPU 遇到了故障,但是恢复不过来的时候,程序就不得不中止了。
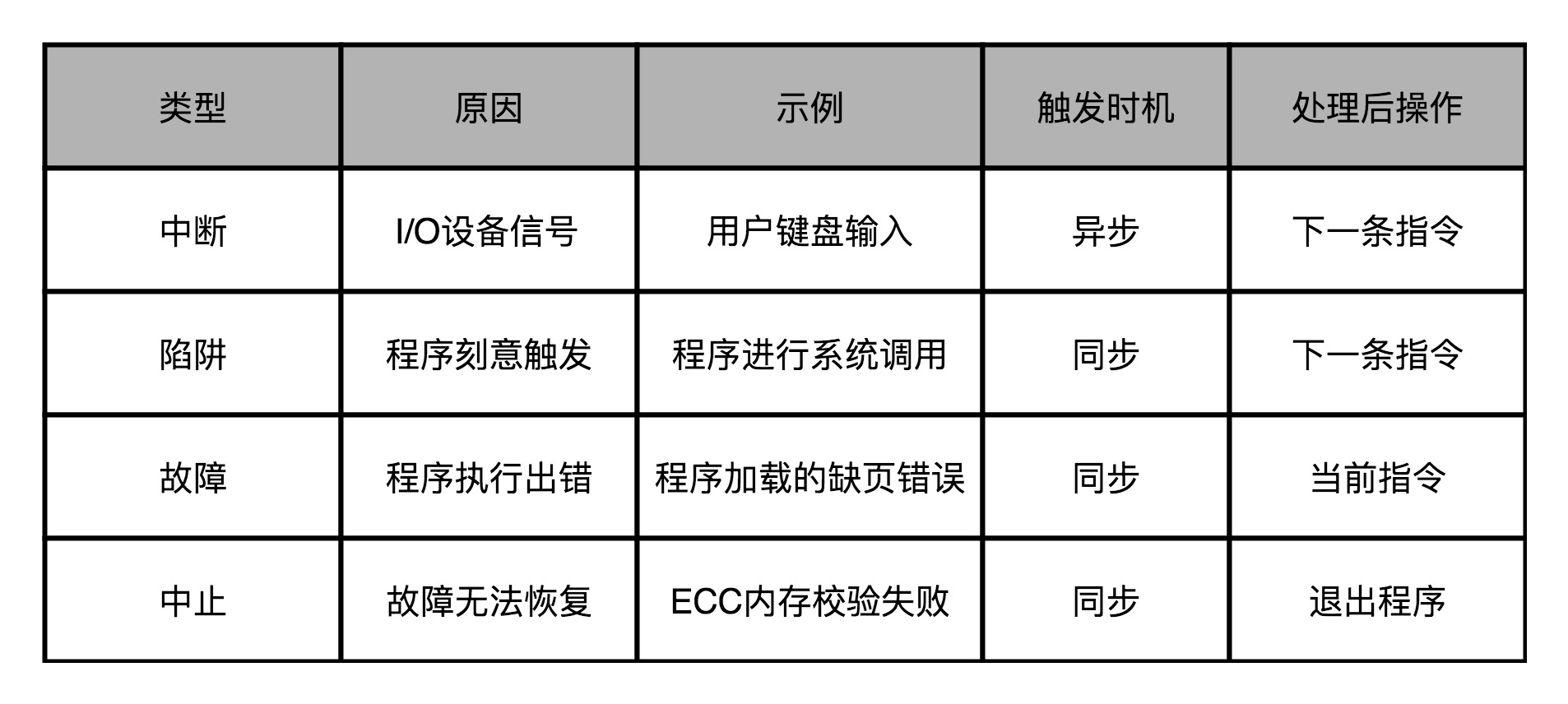
在这四种异常里,中断异常的信号来自系统外部,而不是在程序自己执行的过程中,所以我们称之为“异步”类型的异常。而陷阱、故障以及中止类型的异常,是在程序执行的过程中发生的,所以我们称之为“同步“类型的异常。
在处理异常的过程当中,无论是异步的中断,还是同步的陷阱和故障,我们都是采用同一套处理流程,也就是上面所说的,“保存现场、异常代码查询、异常处理程序调用“。而中止类型的异常,其实是在故障类型异常的一种特殊情况。当故障发生,但是我们发现没有异常处理程序能够处理这种异常的情况下,程序就不得不进入中止状态,也就是最终会退出当前的程序执行。
异常的处理
在实际的异常处理程序执行之前,CPU 需要去做一次“保存现场”的操作。这个保存现场的操作,和我之前讲解函数调用的过程非常相似。
因为切换到异常处理程序的时候,其实就好像是去调用一个异常处理函数。指令的控制权被切换到了另外一个"函数"里面,所以我们自然要把当前正在执行的指令去压栈。这样,我们才能在异常处理程序执行完成之后,重新回到当前的指令继续往下执行。
不过,切换到异常处理程序,比起函数调用,还是要更复杂一些。原因有下面几点。
第一点,因为异常情况往往发生在程序正常执行的预期之外,比如中断、故障发生的时候。所以,除了本来程序压栈要做的事情之外,我们还需要把 CPU 内当前运行程序用到的所有寄存器,都放到栈里面。最典型的就是条件码寄存器里面的内容。
第二点,像陷阱这样的异常,涉及程序指令在用户态和内核态之间的切换。对应压栈的时候,对应的数据是压到内核栈里,而不是程序栈里。
第三点,像故障这样的异常,在异常处理程序执行完成之后。从栈里返回出来,继续执行的不是顺序的下一条指令,而是故障发生的当前指令。因为当前指令因为故障没有正常执行成功,必须重新去执行一次。
所以,对于异常这样的处理流程,不像是顺序执行的指令间的函数调用关系。而是更像两个不同的独立进程之间在 CPU 层面的切换,所以这个过程我们称之为上下文切换(Context Switch)。
总结
异常可以分成中断、陷阱、故障、中止这样四种情况。这四种异常,分别对应着 I/O 设备的输入、程序主动触发的状态切换、异常情况下的程序出错以及出错之后无可挽回的退出程序。
当 CPU 遭遇了异常的时候,计算机就需要有相应的应对措施。CPU 会通过“查表法”来解决这个问题。在硬件层面和操作系统层面,各自定义了所有 CPU 可能会遇到的异常代码,并且通过这个异常代码,在异常表里面查询相应的异常处理程序。在捕捉异常的时候,我们的硬件 CPU 在进行相应的操作,而在处理异常层面,则是由作为软件的异常处理程序进行相应的操作。
而在实际处理异常之前,计算机需要先去做一个“保留现场”的操作。有了这个操作,我们才能在异常处理完成之后,重新回到之前执行的指令序列里面来。这个保留现场的操作,和我们之前讲解指令的函数调用很像。但是,因为“异常”和函数调用有一个很大的不同,那就是它的发生时间。函数调用的压栈操作我们在写程序的时候完全能够知道,而“异常”发生的时间却很不确定。所以,“异常”发生的时候,我们称之为发生了一次“上下文切换”(Context Switch)。这个时候,除了普通需要压栈的数据外,计算机还需要把所有寄存器信息都存储到栈里面去。
