
深入理解python多进程编程
1、python多进程编程背景
python中的多进程最大的好处就是充分利用多核cpu的资源,不像python中的多线程,受制于GIL的限制,从而只能进行cpu分配,在python的多进程中,适合于所有的场合,基本上能用多线程的,那么基本上就能用多进程。
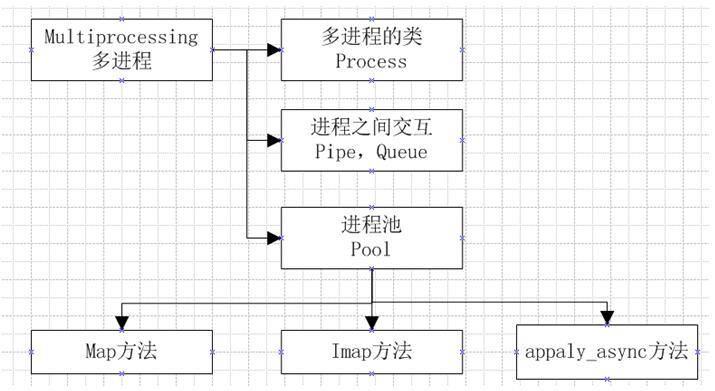
在进行多进程编程的时候,其实和多线程差不多,在多线程的包threading中,存在一个线程类Thread,在其中有三种方法来创建一个线程,启动线程,其实在多进程编程中,存在一个进程类Process,也可以使用那集中方法来使用;在多线程中,内存中的数据是可以直接共享的,例如list等,但是在多进程中,内存数据是不能共享的,从而需要用单独的数据结构来处理共享的数据;在多线程中,数据共享,要保证数据的正确性,从而必须要有所,但是在多进程中,锁的考虑应该很少,因为进程是不共享内存信息的,进程之间的交互数据必须要通过特殊的数据结构,在多进程中,主要的内容如下图:
2、多进程的类Process
多进程的类Process和多线程的类Thread差不多的方法,两者的接口基本相同,具体看以下的代码:
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
|
#!/usr/bin/env pythonfrom multiprocessing import Processimport osimport timedef func(name): print 'start a process' time.sleep(3) print 'the process parent id :',os.getppid() print 'the process id is :',os.getpid()if __name__ =='__main__': processes = [] for i in range(2): p = Process(target=func,args=(i,)) processes.append(p) for i in processes: i.start() print 'start all process' for i in processes: i.join() #pass print 'all sub process is done!' |
在上面例子中可以看到,多进程和多线程的API接口是一样一样的,显示创建进程,然后进行start开始运行,然后join等待进程结束。
在需要执行的函数中,打印出了进程的id和pid,从而可以看到父进程和子进程的id号,在linu中,进程主要是使用fork出来的,在创建进程的时候可以查询到父进程和子进程的id号,而在多线程中是无法找到线程的id,执行效果如下:
|
1
2
3
4
5
6
7
8
9
|
start all processstart a processstart a processthe process parent id : 8036the process parent id : 8036the process id is : 8037the process id is : 8038all sub process is done! |
在操作系统中查询的id的时候,最好用pstree,清晰:
├─sshd(1508)─┬─sshd(2259)───bash(2261)───python(7520)─┬─python(7521)
│ │ ├─python(7522)
│ │ ├─python(7523)
│ │ ├─python(7524)
│ │ ├─python(7525)
│ │ ├─python(7526)
│ │ ├─python(7527)
│ │ ├─python(7528)
│ │ ├─python(7529)
│ │ ├─python(7530)
│ │ ├─python(7531)
│ │ └─python(7532)
在进行运行的时候,可以看到,如果没有join语句,那么主进程是不会等待子进程结束的,是一直会执行下去,然后再等待子进程的执行。
在多进程的时候,说,我怎么得到多进程的返回值呢?然后写了下面的代码:
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
|
#!/usr/bin/env pythonimport multiprocessingclass MyProcess(multiprocessing.Process): def __init__(self,name,func,args): super(MyProcess,self).__init__() self.name = name self.func = func self.args = args self.res = '' def run(self): self.res = self.func(*self.args) print self.name print self.res return (self.res,'kel')def func(name): print 'start process...' return name.upper()if __name__ == '__main__': processes = [] result = [] for i in range(3): p = MyProcess('process',func,('kel',)) processes.append(p) for i in processes: i.start() for i in processes: i.join() for i in processes: result.append(i.res) for i in result: print i |
尝试从结果中返回值,从而在主进程中得到子进程的返回值,然而,,,并没有结果,后来一想,在进程中,进程之间是不共享内存的 ,那么使用list来存放数据显然是不可行的,进程之间的交互必须依赖于特殊的数据结构,从而以上的代码仅仅是执行进程,不能得到进程的返回值,但是以上代码修改为线程,那么是可以得到返回值的。
3、进程间的交互Queue
进程间交互的时候,首先就可以使用在多线程里面一样的Queue结构,但是在多进程中,必须使用multiprocessing里的Queue,代码如下:
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
|
#!/usr/bin/env pythonimport multiprocessingclass MyProcess(multiprocessing.Process): def __init__(self,name,func,args): super(MyProcess,self).__init__() self.name = name self.func = func self.args = args self.res = '' def run(self): self.res = self.func(*self.args)def func(name,q): print 'start process...' q.put(name.upper())if __name__ == '__main__': processes = [] q = multiprocessing.Queue() for i in range(3): p = MyProcess('process',func,('kel',q)) processes.append(p) for i in processes: i.start() for i in processes: i.join() while q.qsize() > 0: print q.get() |
其实这个是上面例子的改进,在其中,并没有使用什么其他的代码,主要就是使用Queue来保存数据,从而可以达到进程间交换数据的目的。
在进行使用Queue的时候,其实用的是socket,感觉,因为在其中使用的还是发送send,然后是接收recv。
在进行数据交互的时候,其实是父进程和所有的子进程进行数据交互,所有的子进程之间基本是没有交互的,除非,但是,也是可以的,例如,每个进程去Queue中取数据,但是这个时候应该是要考虑锁,不然可能会造成数据混乱。
4、 进程之间交互Pipe
在进程之间交互数据的时候还可以使用Pipe,代码如下:
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
|
#!/usr/bin/env pythonimport multiprocessingclass MyProcess(multiprocessing.Process): def __init__(self,name,func,args): super(MyProcess,self).__init__() self.name = name self.func = func self.args = args self.res = '' def run(self): self.res = self.func(*self.args)def func(name,q): print 'start process...' child_conn.send(name.upper())if __name__ == '__main__': processes = [] parent_conn,child_conn = multiprocessing.Pipe() for i in range(3): p = MyProcess('process',func,('kel',child_conn)) processes.append(p) for i in processes: i.start() for i in processes: i.join() for i in processes: print parent_conn.recv() |
在以上代码中,主要是使用Pipe中返回的两个socket来进行传输和接收数据,在父进程中,使用的是parent_conn,在子进程中使用的是child_conn,从而子进程发送数据的方法send,而在父进程中进行接收方法recv
最好的地方在于,明确的知道收发的次数,但是如果某个出现异常,那么估计pipe不能使用了。
5、进程池pool
其实在使用多进程的时候,感觉使用pool是最方便的,在多线程中是不存在pool的。
在使用pool的时候,可以限制每次的进程数,也就是剩余的进程是在排队,而只有在设定的数量的进程在运行,在默认的情况下,进程是cpu的个数,也就是根据multiprocessing.cpu_count()得出的结果。
在poo中,有两个方法,一个是map一个是imap,其实这两方法超级方便,在执行结束之后,可以得到每个进程的返回结果,但是缺点就是每次的时候,只能有一个参数,也就是在执行的函数中,最多是只有一个参数的,否则,需要使用组合参数的方法,代码如下所示:
|
1
2
3
4
5
6
7
8
9
10
11
12
13
|
#!/usr/bin/env pythonimport multiprocessingdef func(name): print 'start process' return name.upper()if __name__ == '__main__': p = multiprocessing.Pool(5) print p.map(func,['kel','smile']) for i in p.imap(func,['kel','smile']): print i |
在使用map的时候,直接返回的一个是一个list,从而这个list也就是函数执行的结果,而在imap中,返回的是一个由结果组成的迭代器,如果需要使用多个参数的话,那么估计需要*args,从而使用参数args。
在使用apply.async的时候,可以直接使用多个参数,如下所示:
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
|
#!/usr/bin/env pythonimport multiprocessingimport timedef func(name): print 'start process' time.sleep(2) return name.upper()if __name__ == '__main__': results = [] p = multiprocessing.Pool(5) for i in range(7): res = p.apply_async(func,args=('kel',)) results.append(res) for i in results: print i.get(2.1) |
在进行得到各个结果的时候,注意使用了一个list来进行append,要不然在得到结果get的时候会阻塞进程,从而将多进程编程了单进程,从而使用了一个list来存放相关的结果,在进行得到get数据的时候,可以设置超时时间,也就是get(timeout=5),这种设置。
总结:
在进行多进程编程的时候,注意进程之间的交互,在执行函数之后,如何得到执行函数的结果,可以使用特殊的数据结构,例如Queue或者Pipe或者其他,在使用pool的时候,可以直接得到结果,map和imap都是直接得到一个list和可迭代对象,而apply_async得到的结果需要用一个list装起来,然后得到每个结果。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号