

哈里斯Harris角
哈里斯Harris角
计算图像的哈里斯角。
哈里斯角是用几个参数计算的
 =输入图像
=输入图像
 =拐角强度阈值
=拐角强度阈值
 =欧几里得半径
=欧几里得半径
 =灵敏度阈值
=灵敏度阈值
 =窗口大小
=窗口大小
 =块大小
=块大小
求角点值或分数的计算可以概括为:
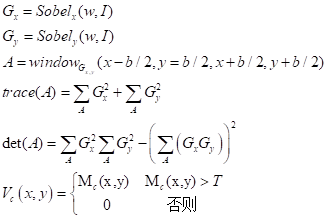
:: where [eq]#V~c~# is the thresholded corner value.
用于梯度计算的归一化 Sobel 核应为 如下所示:[REQ-0218]
对于渐变尺寸 3:
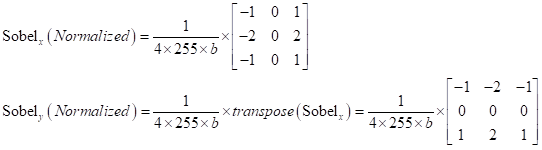
对于渐变尺寸 5:

对于渐变尺寸 7:

Vc然后被非最大抑制,返回与 使用以下算法:
使用定义的非最大抑制算法过滤要素 为。vxFastCornersNode
创建按以下方式排序的要素数组Vc按降序排列:Vc(j) > Vc(j+1).
初始化空特征集 F = {}
对于排序数组中的每个特征 j,而Vc(j) > Tc:
如果 F 中没有特征 i,则使得欧几里得距离 在像素 i 和 j 小于 r 之间,将特征 j 添加到 功能集 F。
实现应支持满足[REQ-0219]的欧几里得距离r的所有值:0≤max_dist≤30。特征集F作为vx_keypoint_t结构的vx_array返回。
功能
3.25.1. 函数
vxHarrisCorners节点
[图表]创建 Harris Corners 节点。
vx_node vxHarrisCornersNode(
vx_graph graph,
vx_image input,
vx_scalar strength_thresh,
vx_scalar min_distance,
vx_scalar sensitivity,
vx_int32 gradient_size,
vx_int32 block_size,
vx_array corners,
vx_scalar num_corners);
参数
[in] graph - 对图形的引用。
[in] input - 输入VX_DF_IMAGE_U8图像。
[in] strength_thresh - 最小阈值VX_TYPE_FLOAT32 用它来消除哈里斯角分数(使用 归一化 Sobel 内核)。
[in] min_distance - 径向欧几里得VX_TYPE_FLOAT32非最大抑制的距离。
[in] sensitivity - VX_TYPE_FLOAT32标量灵敏度 Harris-Stephens 方程中的阈值 k。
[in] gradient_size - 要在输入上使用的渐变窗口大小。 实现必须至少支持 3、5 和 7。
[in] block_size - 用于计算 Harris 的块窗口大小 角球得分。 实现必须至少支持 3、5 和 7。
[out] corners - 对象的数组。 此数组中关键点的顺序由实现定义。VX_TYPE_KEYPOINT[REQ-0227]
[out]corners-VX_TYPE_KEYPOINT对象的数组。此数组中关键点的顺序由实现定义。
返回: .vx_node
返回值
vx_node-节点参考。应使用vxGetStatus检查阻止成功创建的任何可能错误
vxuHarris角落
[即时]计算图像上的哈里斯角,并生成得分数组。
vx_status vxuHarrisCorners(
vx_context context,
vx_image input,
vx_scalar strength_thresh,
vx_scalar min_distance,
vx_scalar sensitivity,
vx_int32 gradient_size,
vx_int32 block_size,
vx_array corners,
vx_scalar num_corners);
参数
[in]context-对整体上下文的引用。
[in]input-输入VX_DF_IMAGE_U8图像。
[in]strength_thresh-消除Harris Corner分数的VX_TYPE_FLOAT32最小阈值(使用标准化Sobel核计算)。
[in]min_distance-用于非最大抑制的VX_TYPE_FLOAT32径向欧几里得距离。
[in]灵敏度-哈里斯-斯蒂芬斯方程中的VX_TYPE_FLOAT32标量灵敏度阈值k。
[in]gradient_size-用于输入的渐变窗口大小。实施必须至少支持3、5和7。
[in]block_size-用于计算harris角得分的块窗口大小。实施必须至少支持3、5和7。
[out]corners-VX_TYPE_KEYPOINT结构的数组。此数组中关键点的顺序由实现定义。
[out]num_corners-[可选]图像中检测到的角点总数。使用VX_TYPE_SIZE标量
返回:vx_status_e枚举。
返回值
VX_SUCCESS-成功
* - 发生错误。 看vx_status_e


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 全程不用写代码,我用AI程序员写了一个飞机大战
· DeepSeek 开源周回顾「GitHub 热点速览」
· 记一次.NET内存居高不下排查解决与启示
· MongoDB 8.0这个新功能碉堡了,比商业数据库还牛
· .NET10 - 预览版1新功能体验(一)
2023-05-22 NPU-ISP技术图例
2023-05-22 Swift 与 Objective-C 混编优化
2022-05-22 Chiplet技术分析展望
2021-05-22 cmodel模拟器开发
2020-05-22 YOLOv4实用训练实践
2020-05-22 摄像头硬件组成模块
2020-05-22 Bayer滤镜转换颜色方案