

TPU-MLIR实现技术详细介绍
//第1章/ tpu-MLIR_envsetup.sh
$ tar zxf tpu-MLIR_xxxx.tar.gz
$ source tpu-MLIR_xxxx/envsetup.sh
|
变量名 |
值 |
说明 |
|
TPUC_ROOT |
tpu-MLIR_xxx |
解压后SDK包的位置 |
|
MODEL_ZOO_PATH |
${TPUC_ROOT}/../model-zoo |
model-zoo文件夹位置, 与SDK在同一级目录 |
//第6章/envsetup.sh
export PATH=${TPUC_ROOT}/bin:$PATH
export PATH=${TPUC_ROOT}/python/tools:$PATH
export PATH=${TPUC_ROOT}/python/utils:$PATH
export PATH=${TPUC_ROOT}/python/test:$PATH
export PATH=${TPUC_ROOT}/python/samples:$PATH
export LD_LIBRARY_PATH=$TPUC_ROOT/lib:$LD_LIBRARY_PATH
export PYTHONPATH=${TPUC_ROOT}/python:$PYTHONPATH
export MODEL_ZOO_PATH=${TPUC_ROOT}/../model-zoo
//第6章/envsetup.sh
$ mkdir model_yolov5s && cd model_yolov5s
$ cp $TPUC_ROOT/regression/model/yolov5s.onnx.
$ cp -rf $TPUC_ROOT/regression/dataset/COCO2017.
$ cp -rf $TPUC_ROOT/regression/image.
$ mkdir workspace && cd workspace
 代表输入):
代表输入):

(6-34)
//第6章/model_transform.py
$ model_transform.py \
--model_name yolov5s \
--model_def../yolov5s.onnx \
--input_shapes [[1,3,640,640]] \
--mean 0.0,0.0,0.0 \
--scale 0.0039216,0.0039216,0.0039216 \
--keep_aspect_ratio \
--pixel_format rgb \
--output_names 350,498,646 \
--test_input../image/dog.jpg \
--test_result yolov5s_top_outputs.npz \
--MLIR yolov5s.MLIR \
--post_handle_type yolo
//第6章/model_deploy.py
$ model_deploy.py \
--MLIR yolov5s.MLIR \
--quantize F32 \
--chip bm1684x \
--test_input yolov5s_in_f32.npz \
--test_reference yolov5s_top_outputs.npz \
--tolerance 0.99,0.99 \
--model yolov5s_1684x_f32.bmodel
//第6章/run_calibration.py
$ run_calibration.py yolov5s.MLIR \
--dataset../COCO2017 \
--input_num 100 \
-o yolov5s_cali_table
//第6章/model_deploy.py
$ model_deploy.py \
--MLIR yolov5s.MLIR \
--quantize INT8 \
--calibration_table yolov5s_cali_table \
--chip bm1684x \
--test_input yolov5s_in_f32.npz \
--test_reference yolov5s_top_outputs.npz \
--tolerance 0.85,0.45 \
--model yolov5s_1684x_int8_sym.bmodel
//第6章/model_deploy_yolov5s.py
$ model_deploy.py \
--MLIR yolov5s.MLIR \
--quantize INT8 \
--asymmetric \
--calibration_table yolov5s_cali_table \
--chip bm1684x \
--test_input yolov5s_in_f32.npz \
--test_reference yolov5s_top_outputs.npz \
--tolerance 0.90,0.55 \
--model yolov5s_1684x_int8_asym.bmodel
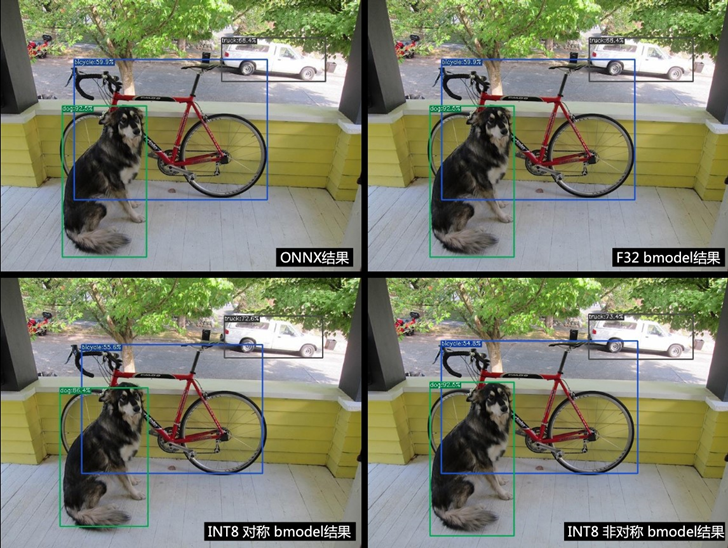
//第6章/detect_bmodel_yolov5.py
onnx模型的执行方式如下, 得到 dog_onnx.jpg:
$ detect_yolov5.py \
--input../image/dog.jpg \
--model../yolov5s.onnx \
--output dog_onnx.jpg
f32 bmodel的执行方式如下, 得到 dog_f32.jpg:
$ detect_yolov5.py \
--input../image/dog.jpg \
--model yolov5s_1684x_f32.bmodel \
--output dog_f32.jpg
int8对称bmodel的执行方式如下, 得到 dog_int8_sym.jpg:
$ detect_yolov5.py \
--input../image/dog.jpg \
--model yolov5s_1684x_int8_sym.bmodel \
--output dog_int8_sym.jpg
int8非对称bmodel的执行方式如下, 得到 dog_int8_asym.jpg:
$ detect_yolov5.py \
--input../image/dog.jpg \
--model yolov5s_1684x_int8_asym.bmodel \
--output dog_int8_asym.jpg
//第6章/test_bmodel_yolov5s.py
# 下面测试上面编译出的bmodel
# --bmodel参数后面接bmodel文件,
$ cd $TPUC_ROOT/../model_yolov5s/workspace
$ bmrt_test --bmodel yolov5s_1684x_f32.bmodel
$ bmrt_test --bmodel yolov5s_1684x_int8_asym.bmodel
$ bmrt_test --bmodel yolov5s_1684x_int8_sym.bmodel
以最后一个命令输出为例(此处对日志做了部分截断处理):
[BMRT][load_bmodel:983] INFO:pre net num: 0, load net num: 1
[BMRT][show_net_info:1358] INFO: ########################
[BMRT][show_net_info:1359] INFO: NetName: yolov5s, Index=0
[BMRT][show_net_info:1361] INFO: ---- stage 0 ----
[BMRT][show_net_info:1369] INFO: input 0) 'images' shape=[ 1 3 640 640 ] dtype=FLOAT32
[BMRT][show_net_info:1378] INFO: output 0) '350_Transpose_f32' shape=[ 1 3 80 80 85 ]...
[BMRT][show_net_info:1378] INFO: output 1) '498_Transpose_f32' shape=[ 1 3 40 40 85 ]...
[BMRT][show_net_info:1378] INFO: output 2) '646_Transpose_f32' shape=[ 1 3 20 20 85 ]...
[BMRT][show_net_info:1381] INFO: ########################
[BMRT][bmrt_test:770] INFO:==> running network #0, name: yolov5s, loop: 0
[BMRT][bmrt_test:834] INFO:reading input #0, bytesize=4915200
[BMRT][print_array:702] INFO: --> input_data: < 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0...
[BMRT][bmrt_test:982] INFO:reading output #0, bytesize=6528000
[BMRT][print_array:702] INFO: --> output ref_data: < 0 0 0 0 0 0 0 0 0 0 0 0 0 0...
[BMRT][bmrt_test:982] INFO:reading output #1, bytesize=1632000
[BMRT][print_array:702] INFO: --> output ref_data: < 0 0 0 0 0 0 0 0 0 0 0 0 0 0...
[BMRT][bmrt_test:982] INFO:reading output #2, bytesize=408000
[BMRT][print_array:702] INFO: --> output ref_data: < 0 0 0 0 0 0 0 0 0 0 0 0 0 0...
[BMRT][bmrt_test:1014] INFO:net[yolov5s] stage[0], launch total time is 4122 us (npu 4009 us, cpu 113 us)
[BMRT][bmrt_test:1017] INFO:+++ The network[yolov5s] stage[0] output_data +++
[BMRT][print_array:702] INFO:output data #0 shape: [1 3 80 80 85 ] < 0.301003 ...
[BMRT][print_array:702] INFO:output data #1 shape: [1 3 40 40 85 ] < 0 0.228689 ...
[BMRT][print_array:702] INFO:output data #2 shape: [1 3 20 20 85 ] < 1.00135 ...
[BMRT][bmrt_test:1058] INFO:load input time(s): 0.008914
[BMRT][bmrt_test:1059] INFO:calculate time(s): 0.004132
[BMRT][bmrt_test:1060] INFO:get output time(s): 0.012603
[BMRT][bmrt_test:1061] INFO:compare time(s): 0.006514
//第6章/envsetup_tpu-MLIR.py
$ tar zxf zxf tpu-MLIR_xxxx.tar.gz
$ source tpu-MLIR_xxxx/envsetup.sh
envsetup.sh 会添加以下环境变量:
环境变量
envsetup.sh 对环境变量的修改内容为:
export PATH=${TPUC_ROOT}/bin:$PATH
export PATH=${TPUC_ROOT}/python/tools:$PATH
export PATH=${TPUC_ROOT}/python/utils:$PATH
export PATH=${TPUC_ROOT}/python/test:$PATH
export PATH=${TPUC_ROOT}/python/samples:$PATH
export LD_LIBRARY_PATH=$TPUC_ROOT/lib:$LD_LIBRARY_PATH
export PYTHONPATH=${TPUC_ROOT}/python:$PYTHONPATH
export MODEL_ZOO_PATH=${TPUC_ROOT}/../model-zoo
//第6章/model_resnet50_tf.py
$ mkdir model_resnet50_tf && cd model_resnet50_tf
$ cp $TPUC_ROOT/regression/model/resnet50_int8.tflite.
$ cp -rf $TPUC_ROOT/regression/image.
$ mkdir workspace && cd workspace
//第6章/model_transform_resnet50.py
$ model_transform.py \
--model_name resnet50_tf \
--model_def ../resnet50_int8.tflite \
--input_shapes [[1,3,224,224]] \
--mean 103.939,116.779,123.68 \
--scale 1.0,1.0,1.0 \
--pixel_format bgr \
--test_input../image/cat.jpg \
--test_result resnet50_tf_top_outputs.npz \
--MLIR resnet50_tf.MLIR
//第6章/model_deploy_resnet50.py
$ model_deploy.py \
--MLIR resnet50_tf.MLIR \
--quantize INT8 \
--asymmetric \
--chip bm1684x \
--test_input resnet50_tf_in_f32.npz \
--test_reference resnet50_tf_top_outputs.npz \
--model resnet50_tf_1684x.bmodel
//第6章/model_envsetup_tpu-MLIR.py
$ tar zxf tpu-MLIR_xxxx.tar.gz
$ source tpu-MLIR_xxxx/envsetup.sh
envsetup.sh 会添加以下环境变量:
环境变量
envsetup.sh 对环境变量的修改内容为:
export PATH=${TPUC_ROOT}/bin:$PATH
export PATH=${TPUC_ROOT}/python/tools:$PATH
export PATH=${TPUC_ROOT}/python/utils:$PATH
export PATH=${TPUC_ROOT}/python/test:$PATH
export PATH=${TPUC_ROOT}/python/samples:$PATH
export LD_LIBRARY_PATH=$TPUC_ROOT/lib:$LD_LIBRARY_PATH
export PYTHONPATH=${TPUC_ROOT}/python:$PYTHONPATH
export MODEL_ZOO_PATH=${TPUC_ROOT}/../model-zoo
//第6章/model_mobilenet_v2.py
$ mkdir mobilenet_v2 && cd mobilenet_v2
$ cp $TPUC_ROOT/regression/model/mobilenet_v2_deploy.prototxt.
$ cp $TPUC_ROOT/regression/model/mobilenet_v2.caffemodel.
$ cp -rf $TPUC_ROOT/regression/dataset/ILSVRC2012.
$ cp -rf $TPUC_ROOT/regression/image.
$ mkdir workspace && cd workspace
//第6章/transform_mobilenet_v2.py
$ model_transform.py \
--model_name mobilenet_v2 \
--model_def../mobilenet_v2_deploy.prototxt \
--model_data../mobilenet_v2.caffemodel \
--input_shapes [[1,3,224,224]] \
--resize_dims=256,256 \
--mean 103.94,116.78,123.68 \
--scale 0.017,0.017,0.017 \
--pixel_format bgr \
--test_input../image/cat.jpg \
--test_result mobilenet_v2_top_outputs.npz \
--MLIR mobilenet_v2.MLIR
//第6章/model_deploy_mobilenet_v2.py
$ model_deploy.py \
--MLIR mobilenet_v2.MLIR \
--quantize F32 \
--chip bm1684x \
--test_input mobilenet_v2_in_f32.npz \
--test_reference mobilenet_v2_top_outputs.npz \
--tolerance 0.99,0.99 \
--model mobilenet_v2_1684x_f32.bmodel
//第6章/calibration _mobilenet_v2.py
$ run_calibration.py mobilenet_v2.MLIR \
--dataset../ILSVRC2012 \
--input_num 100 \
-o mobilenet_v2_cali_table
//第6章/mlir_calibration_mobilenet_v2.py
$ model_deploy.py \
--MLIR mobilenet_v2.MLIR \
--quantize INT8 \
--calibration_table mobilenet_v2_cali_table \
--chip bm1684x \
--test_input mobilenet_v2_in_f32.npz \
--test_reference mobilenet_v2_top_outputs.npz \
--tolerance 0.96,0.70 \
--model mobilenet_v2_1684x_int8_sym.bmodel
//第6章/mlir_asymmetric_mobilenet_v2.py
$ model_deploy.py \
--MLIR mobilenet_v2.MLIR \
--quantize INT8 \
--asymmetric \
--calibration_table mobilenet_v2_cali_table \
--chip bm1684x \
--test_input mobilenet_v2_in_f32.npz \
--test_reference mobilenet_v2_top_outputs.npz \
--tolerance 0.95,0.69 \
--model mobilenet_v2_1684x_int8_asym.bmodel
//第6章/tpu_mlir_envsetup.py
$ tar zxf tpu-MLIR_xxxx.tar.gz
$ source tpu-MLIR_xxxx/envsetup.sh
envsetup.sh 会添加以下环境变量:
envsetup.sh 对环境变量的修改内容为:
export PATH=${TPUC_ROOT}/bin:$PATH
export PATH=${TPUC_ROOT}/python/tools:$PATH
export PATH=${TPUC_ROOT}/python/utils:$PATH
export PATH=${TPUC_ROOT}/python/test:$PATH
export PATH=${TPUC_ROOT}/python/samples:$PATH
export LD_LIBRARY_PATH=$TPUC_ROOT/lib:$LD_LIBRARY_PATH
export PYTHONPATH=${TPUC_ROOT}/python:$PYTHONPATH
export MODEL_ZOO_PATH=${TPUC_ROOT}/../model-zoo
//第6章/wget_envsetup.py
$ mkdir yolov3_tiny && cd yolov3_tiny
$ wget https://github.com/onnx/models/raw/main/vision/object_detection_segmentation/tiny-yolov3/model/tiny-yolov3-11.onnx
$ cp -rf $TPUC_ROOT/regression/dataset/COCO2017.
$ mkdir workspace && cd workspace
$ tar zxf tpu-MLIR_xxxx.tar.gz
$ source tpu-MLIR_xxxx/envsetup.sh
envsetup.sh 会添加以下环境变量:
envsetup.sh 对环境变量的修改内容为:
export PATH=${TPUC_ROOT}/bin:$PATH
export PATH=${TPUC_ROOT}/python/tools:$PATH
export PATH=${TPUC_ROOT}/python/utils:$PATH
export PATH=${TPUC_ROOT}/python/test:$PATH
export PATH=${TPUC_ROOT}/python/samples:$PATH
export LD_LIBRARY_PATH=$TPUC_ROOT/lib:$LD_LIBRARY_PATH
export PYTHONPATH=${TPUC_ROOT}/python:$PYTHONPATH
export MODEL_ZOO_PATH=${TPUC_ROOT}/../model-zoo
//第6章/detect_yolov3.py
$ detect_yolov3.py \
--model../tiny-yolov3-11.onnx \
--input../COCO2017/000000366711.jpg \
--output yolov3_onnx.jpg
执行完后输出检测到的结果如下:
person:60.7%
orange:77.5%

//第6章/yolov3_tiny.py
第一步: 转成F32 MLIR
$ model_transform.py \
--model_name yolov3_tiny \
--model_def../tiny-yolov3-11.onnx \
--input_shapes [[1,3,416,416]] \
--scale 0.0039216,0.0039216,0.0039216 \
--pixel_format rgb \
--keep_aspect_ratio \
--pad_value 128 \
--output_names=transpose_output1,transpose_output \
--MLIR yolov3_tiny.MLIR
第二步: 生成calibartion table
$ run_calibration.py yolov3_tiny.MLIR \
--dataset../COCO2017 \
--input_num 100 \
-o yolov3_cali_table
第三步: 转对称量化模型
$ model_deploy.py \
--MLIR yolov3_tiny.MLIR \
--quantize INT8 \
--calibration_table yolov3_cali_table \
--chip bm1684x \
--model yolov3_int8.bmodel
第四步: 验证模型
$ detect_yolov3.py \
--model yolov3_int8.bmodel \
--input../COCO2017/000000366711.jpg \
--output yolov3_int8.jpg

//第6章/run_qtable_yolov3_tiny.py
$ run_qtable.py yolov3_tiny.MLIR \
--dataset../COCO2017 \
--calibration_table yolov3_cali_table \
--chip bm1684x \
--min_layer_cos 0.999 \ #若这里使用默认的0.99时,程序会检测到原始int8模型已满足0.99的cos,从而直接不再搜素
--expected_cos 0.9999 \
-o yolov3_qtable
执行完后最后输出如下输出:
int8 outputs_cos:0.999317
mix model outputs_cos:0.999739
output mix quantization table to yolov3_qtable
total time:44 second
上面int8 outputs_cos表示int8模型原本网络输出与fp32的cos相似度,mix model outputs_cos表示部分层使用混精度后网络输出的cos相似度,total time表示搜索时间为44秒, 另外,生成的混精度量化表 yolov3_qtable, 内容如下:
# op_name quantize_mode
convolution_output11_convF16
model_1/leaky_re_lu_2/LeakyRelu:0_LeakyRelu F16
model_1/leaky_re_lu_2/LeakyRelu:0_pooling0_MaxPool F16
convolution_output10_convF16
convolution_output9_convF16
model_1/leaky_re_lu_4/LeakyRelu:0_LeakyRelu F16
model_1/leaky_re_lu_5/LeakyRelu:0_LeakyRelu F16
model_1/leaky_re_lu_5/LeakyRelu:0_pooling0_MaxPool F16
model_1/concatenate_1/concat:0_Concat F16
该表中, 第一列表示相应的layer, 第二列表示类型, 支持的类型有F32/F16/BF16/INT8。 另外同时也会生成一个loss表文件 full_loss_table.txt, 内容如下:
# chip: bm1684x mix_mode: F16
###
No.0 : Layer:convolution_output11_conv Cos: 0.984398
No.1 : Layer: model_1/leaky_re_lu_5/LeakyRelu:0_LeakyRelu Cos: 0.998341
No.2 : Layer: model_1/leaky_re_lu_2/LeakyRelu:0_pooling0_MaxPool Cos: 0.998500
No.3 : Layer:convolution_output9_conv Cos: 0.998926
No.4 : Layer:convolution_output8_conv Cos: 0.999249
No.5 : Layer: model_1/leaky_re_lu_4/LeakyRelu:0_pooling0_MaxPool Cos: 0.999284
No.6 : Layer: model_1/leaky_re_lu_1/LeakyRelu:0_LeakyRelu Cos: 0.999368
No.7 : Layer: model_1/leaky_re_lu_3/LeakyRelu:0_LeakyRelu Cos: 0.999554
No.8 : Layer: model_1/leaky_re_lu_1/LeakyRelu:0_pooling0_MaxPool Cos: 0.999576
No.9 : Layer: model_1/leaky_re_lu_3/LeakyRelu:0_pooling0_MaxPool Cos: 0.999723
No.10 : Layer:convolution_output12_conv Cos: 0.999810
该表按cos从小到大顺利排列, 表示该层的前驱Layer根据各自的cos已换成相应的浮点模式后, 该层计算得到的cos, 若该cos仍小于前面min_layer_cos参数,则会将该层及直接后继层设置为浮点计算。 run_qtable.py 会在每次设置某相邻2层为浮点计算后,接续计算整个网络的输出cos,若该cos大于指定的expected_cos,则退出搜素。因此,若设置更大的expected_cos,会尝试将更多层设为浮点计算
第二步: 生成混精度量化模型
$ model_deploy.py \
--MLIR yolov3_tiny.MLIR \
--quantize INT8 \
--quantize_table yolov3_qtable \
--calibration_table yolov3_cali_table \
--chip bm1684x \
--model yolov3_mix.bmodel
第三步: 验证混精度模型
$ detect_yolov3.py \
--model yolov3_mix.bmodel \
--input../COCO2017/000000366711.jpg \
--output yolov3_mix.jpg

|
预处理类型 |
BM168X |
CV18XX |
|
图像裁剪 |
True |
True |
|
归一化计算 |
True |
True |
|
NHWC to NCHW |
True |
True |
|
BGR/RGB 转换 |
True |
True |
|
CUSTOMIZATION_FORMAT |
说明 |
BM1684X |
CV18XX |
|
None |
与原始模型输入保持一致, 不做处理。默认 |
True |
True |
|
RGB_PLANAR |
rgb顺序,按照nchw摆放 |
True |
True |
|
RGB_PACKED |
rgb顺序,按照nhwc摆放 |
True |
True |
|
BGR_PLANAR |
bgr顺序,按照nchw摆放 |
True |
True |
|
BGR_PACKED |
bgr顺序,按照nhwc摆放 |
True |
True |
|
GRAYscale |
仅有⼀个灰⾊通道,按nchw摆 |
True |
True |
|
YUV420_PLANAR |
yuv420 planner格式,来⾃vpss的输⼊ |
False |
True |
|
YUV_NV21 |
yuv420的NV21格式,来⾃vpss的输⼊ |
False |
True |
|
YUV_NV12 |
yuv420的NV12格式,来⾃vpss的输⼊ |
False |
True |
|
RGBA_PLANAR |
rgba格式,按照nchw摆放 |
False |
True |
//第6章/test_model_deploy.py
$ model_deploy.py \
--MLIR mobilenet_v2.MLIR \
--quantize INT8 \
--calibration_table mobilenet_v2_cali_table \
--chip bm1684x \
--test_input../image/cat.jpg \
--test_reference mobilenet_v2_top_outputs.npz \
--tolerance 0.96,0.70 \
--fuse_preprocess \
--model mobilenet_v2_bm1684x_int8_sym_fuse_preprocess.bmodel
//第6章/sym_fuse_preprocess.cvimodel.py
$ model_deploy.py \
--MLIR mobilenet_v2.MLIR \
--quantize INT8 \
--calibration_table mobilenet_v2_cali_table \
--chip cv183x \
--test_input../image/cat.jpg \
--test_reference mobilenet_v2_top_outputs.npz \
--tolerance 0.96,0.70 \
--fuse_preprocess \
--customization_format RGB_PLANAR \
--model mobilenet_v2_cv183x_int8_sym_fuse_preprocess.cvimodel
//第6章/sym_fuse_preprocess_aligned.cvimodel.py
$ model_deploy.py \
--MLIR mobilenet_v2.MLIR \
--quantize INT8 \
--calibration_table mobilenet_v2_cali_table \
--chip cv183x \
--test_input../image/cat.jpg \
--test_reference mobilenet_v2_top_outputs.npz \
--tolerance 0.96,0.70 \
--fuse_preprocess \
--customization_format RGB_PLANAR \
--aligned_input \
--model mobilenet_v2_cv183x_int8_sym_fuse_preprocess_aligned.cvimodel
//第6章/torch_model.py
步骤0:创建工作目录
在命令行中创建并进入torch_model目录。
$ mkdir torch_model
$ cd torch_model
步骤1:搭建并保存模型
在该目录下创建名为simple_net.py的脚本并运行,脚本的具体内容如下:
#!/usr/bin/env python3
import torch
# 构建简单的神经网络模型
class SimpleModel(torch.nn.Module):
def __init__(self):
super(SimpleModel, self).__init__()
self.m1 = torch.nn.conv2d(3, 8, 3, 1, 0)
self.m2 = torch.nn.conv2d(8, 8, 3, 1, 1)
def forward(self,x):
y0 = self.m1(x)
y1 = self.m2(y0)
y2 = y0 + y1
return y2
# 创建一个SimpleModel并将其权重保存在当前目录中
model = SimpleModel()
torch.save(model.state_dict(), weight.pth)
运行完后会在当前目录下获得一个weight.pth的权重文件。
步骤2:导出ONNX模型
在该目录下创建另一个名为export_onnx.py的脚本并运行,脚本的具体内容如下:
#!/usr/bin/env python3
import torch
from simple_net import SimpleModel
# 加载预训练的模型并将其导出为onnx
model = SimpleModel()
model.eval()
checkpoint = torch.load(weight.pth, map_location=cpu)
model.load_state_dict(checkpoint)
# 准备输入张量
input = torch.randn(1, 3, 16, 16, requires_grad=True)
# 将torch模型导出为onnx
torch.onnx.export(model,
input,
'model.onnx', # 导出的onnx模型的名称
opset_version=13,
export_params=True,
do_constant_folding=True)
//第6章/tf_model_onnx.py
步骤0:创建工作目录
在命令行中创建并进入tf_model目录。
$ mkdir tf_model
$ cd tf_model
步骤1:准备并转换模型
命令行中通过以下命令下载模型并利用tf2onnx工具将其导出为ONNX模型:
$ wget -nc http://download.tensorflow.org/models/mobilenet_v1_2018_08_02/mobilenet_v1_0.25_224.tgz
# tar获取*.pb模型定义文件
$ tar xzf mobilenet_v1_0.25_224.tgz
$ python -m tf2onnx.convert --graphdef mobilenet_v1_0.25_224_frozen.pb \
--output mnet_25.onnx --inputs input:0 \
--inputs-as-nchw input:0 \
--outputs MobilenetV1/Predictions/Reshape_1:0
//第6章/pp_model_onnx.py
步骤0:创建工作目录
在命令行中创建并进入pp_model目录。
$ mkdir pp_model
$ cd pp_model
步骤1:准备模型
在命令行中通过以下命令下载模型:
$ wget https://bj.bcebos.com/paddlehub/fastdeploy/SqueezeNet1_1_infer.tgz
$ tar xzf SqueezeNet1_1_infer.tgz
$ cd SqueezeNet1_1_infer
并用PaddlePaddle项目中的paddle_infer_shape.py脚本对模型进行shape推理,此处将输入shape以NCHW的格式设置为[1,3,224,224]:
$ wget https://raw.githubusercontent.com/PaddlePaddle/Paddle2ONNX/develop/tools/paddle/paddle_infer_shape.py
$ python paddle_infer_shape.py --model_dir. \
--model_filename inference.pdmodel \
--params_filename inference.pdiparams \
--save_dir new_model \
--input_shape_dict={'inputs':[1,3,224,224]}
运行完以上所有命令后将处于SqueezeNet1_1_infer目录下,并在该目录下有一个new_model的目录。
步骤2:转换模型
在命令行中通过以下命令安装paddle2onnx工具,并利用该工具将PaddlePaddle模型转为ONNX模型:
$ pip install paddle2onnx
$ paddle2onnx --model_dir new_model \
--model_filename inference.pdmodel \
--params_filename inference.pdiparams \
--opset_version 13 \
--save_file squeezenet1_1.onnx
//第6章/tpu-MLIR_envsetup.py
$ tar zxf tpu-MLIR_xxxx.tar.gz
$ source tpu-MLIR_xxxx/envsetup.sh
envsetup.sh 会添加以下环境变量:
操作如下:
$ mkdir model_yolov5s && cd model_yolov5s
$ cp $TPUC_ROOT/regression/model/yolov5s.onnx.
$ cp -rf $TPUC_ROOT/regression/dataset/COCO2017.
$ cp -rf $TPUC_ROOT/regression/image.
$ mkdir workspace && cd workspace
这里的 $TPUC_ROOT 是环境变量, 对应tpu-MLIR_xxxx目录。

代表输入):

官网yolov5的图片是rgb, 每个值会乘以 1/255, 转换成均值与缩放对应为 0.0,0.0,0.0 与 0.0039216,0.0039216,0.0039216,命令如下:
//第6章/model_transform_deploy_calibration.py
模型转换命令如下:
$ model_transform.py \
--model_name yolov5s \
--model_def../yolov5s.onnx \
--input_shapes [[1,3,640,640]] \
--mean 0.0,0.0,0.0 \
--缩放 0.0039216,0.0039216,0.0039216 \
--keep_aspect_ratio \
--pixel_format rgb \
--output_names 350,498,646 \
--test_input../image/dog.jpg \
--test_result yolov5s_top_outputs.npz \
--MLIR yolov5s.MLIR
model_transform 的相关参数说明参考编译ONNX模型-ONNX转MLIR部分。
MLIR转BF16模型
将MLIR文件转换成bf16的cvimodel, 操作方法如下:
$ model_deploy.py \
--MLIR yolov5s.MLIR \
--quantize BF16 \
--chip cv183x \
--test_input yolov5s_in_f32.npz \
--test_reference yolov5s_top_outputs.npz \
--tolerance 0.99,0.99 \
--model yolov5s_cv183x_bf16.cvimodel
model_deploy.py 的相关参数说明参考编译ONNX模型-MLIR转F32模型部分。
MLIR转INT8模型
转INT8模型前需要跑calibration, 得到校准表; 输入数据的数量根据情况准备100~1000张左右。然后用校准表, 生成INT8对称cvimodel
这里用现有的100张来自COCO2017的图片举例, 执行calibration:
$ run_calibration.py yolov5s.MLIR \
--dataset../COCO2017 \
--input_num 100 \
-o yolov5s_cali_table
运行完成后会生成名为 ${model_name}_cali_table 的文件, 该文件用于后续编译INT8 模型的输入文件。
转成INT8对称量化cvimodel模型, 执行如下命令:
$ model_deploy.py \
--MLIR yolov5s.MLIR \
--quantize INT8 \
--calibration_table yolov5s_cali_table \
--chip cv183x \
--test_input yolov5s_in_f32.npz \
--test_reference yolov5s_top_outputs.npz \
--tolerance 0.85,0.45 \
--model yolov5s_cv183x_int8_sym.cvimodel
编译完成后, 会生成名为 ${model_name}_cv183x_int8_sym.cvimodel 的文件。
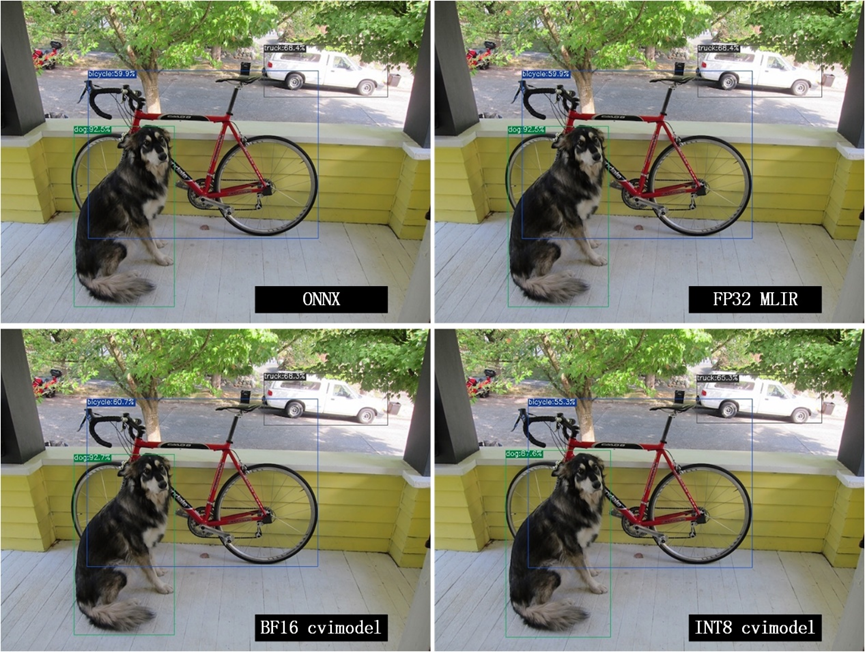
效果对比
onnx模型的执行方式如下, 得到 dog_onnx.jpg:
$ detect_yolov5.py \
--input../image/dog.jpg \
--model../yolov5s.onnx \
--output dog_onnx.jpg
FP32 MLIR模型的执行方式如下,得到 dog_MLIR.jpg:
$ detect_yolov5.py \
--input../image/dog.jpg \
--model yolov5s.MLIR \
--output dog_MLIR.jpg
BF16 cvimodel的执行方式如下, 得到 dog_bf16.jpg:
$ detect_yolov5.py \
--input../image/dog.jpg \
--model yolov5s_cv183x_bf16.cvimodel \
--output dog_bf16.jpg
INT8 cvimodel的执行方式如下, 得到 dog_int8.jpg:
$ detect_yolov5.py \
--input../image/dog.jpg \
--model yolov5s_cv183x_int8_sym.cvimodel \
--output dog_int8.jpg
//第6章/model_transform_cvimodel.py
步骤0:生成batch 1的cvimodel
新建workspace目录,通过model_transform.py将yolov5s转换成MLIR fp32模型。
注意:
1.需要合并的cvimodel使用同一个workspace目录,并且不要与不需要合并的cvimodel 共用一个workspace;
2.步骤0、步骤1中 –merge_weight是必需选项。
$ model_transform.py \
--model_name yolov5s \
--model_def../yolov5s.onnx \
--input_shapes [[1,3,640,640]] \
--mean 0.0,0.0,0.0 \
--缩放 0.0039216,0.0039216,0.0039216 \
--keep_aspect_ratio \
--pixel_format rgb \
--output_names 350,498,646 \
--test_input../image/dog.jpg \
--test_result yolov5s_top_outputs.npz \
--MLIR yolov5s_bs1.MLIR
使用前述生成的yolov5s_cali_table;如果没有,则通过run_calibration.py工具对yolov5s.MLIR进行量化校验获得校准表文件。 然后将模型量化并生成cvimodel:
# 加上 --merge_weight参数
$ model_deploy.py \
--MLIR yolov5s_bs1.MLIR \
--quantize INT8 \
--calibration_table yolov5s_cali_table \
--chip cv183x \
--test_input yolov5s_in_f32.npz \
--test_reference yolov5s_top_outputs.npz \
--tolerance 0.85,0.45 \
--merge_weight \
--model yolov5s_cv183x_int8_sym_bs1.cvimodel
步骤1:生成batch 2的cvimodel
同步骤0,在同一个workspace中生成batch为2的MLIR fp32文件:
$ model_transform.py \
--model_name yolov5s \
--model_def../yolov5s.onnx \
--input_shapes [[2,3,640,640]] \
--mean 0.0,0.0,0.0 \
--缩放 0.0039216,0.0039216,0.0039216 \
--keep_aspect_ratio \
--pixel_format rgb \
--output_names 350,498,646 \
--test_input../image/dog.jpg \
--test_result yolov5s_top_outputs.npz \
--MLIR yolov5s_bs2.MLIR
# 加上 --merge_weight参数
$ model_deploy.py \
--MLIR yolov5s_bs2.MLIR \
--quantize INT8 \
--calibration_table yolov5s_cali_table \
--chip cv183x \
--test_input yolov5s_in_f32.npz \
--test_reference yolov5s_top_outputs.npz \
--tolerance 0.85,0.45 \
--merge_weight \
--model yolov5s_cv183x_int8_sym_bs2.cvimodel
步骤2:合并batch 1与batch 2的cvimodel
使用model_tool合并两个cvimodel文件:
model_tool \
--combine \
yolov5s_cv183x_int8_sym_bs1.cvimodel \
yolov5s_cv183x_int8_sym_bs2.cvimodel \
-o yolov5s_cv183x_int8_sym_bs1_bs2.cvimodel
步骤3:runtime接口调用cvimodel
可以通过以下命令查看bs1与bs2指令的程序id:
model_tool --info yolov5s_cv183x_int8_sym_bs1_bs2.cvimodel
在运行时可以通过如下方式去运行不同的batch命令:
CVI_MODEL_HANDEL bs1_handle;
CVI_RC ret = CVI_NN_RegisterModel(yolov5s_cv183x_int8_sym_bs1_bs2.cvimodel, &bs1_handle);
assert(ret == CVI_RC_SUCCESS);
// 选择bs1的程序id
CVI_NN_SetConfig(bs1_handle, OPTION_PROGRAM_INDEX, 0);
CVI_NN_Get输入输出tensors(bs1_handle,...);
....
CVI_MODEL_HANDLE bs2_handle;
// 复用已加载的模型
CVI_RC ret = CVI_NN_CloneModel(bs1_handle, &bs2_handle);
assert(ret == CVI_RC_SUCCESS);
// 选择bs2的程序id
CVI_NN_SetConfig(bs2_handle, OPTION_PROGRAM_INDEX, 1);
CVI_NN_Getinputoutputtensors(bs2_handle,...);
...
// 最后销毁bs1_handle, bs2_handel
CVI_NN_CleanupModel(bs1_handle);
CVI_NN_CleanupModel(bs2_handle);
//第6章/cvimodel_samples.py
#env
tar zxf cvimodel_samples_cv183x.tar.gz
export MODEL_PATH=$PWD/cvimodel_samples
tar zxf cvitek_tpu_sdk_cv183x.tar.gz
export TPU_ROOT=$PWD/cvitek_tpu_sdk
cd cvitek_tpu_sdk && source./envs_tpu_sdk.sh
# get cvimodel info
cd samples
./bin/cvi_sample_model_info $MODEL_PATH/mobilenet_v2.cvimodel
####################################
# sample-1: 分类器
###################################
./bin/cvi_sample_classifier \
$MODEL_PATH/mobilenet_v2.cvimodel \
./data/cat.jpg \
./data/synset_words.txt
# TOP_K[5]:
# 0.326172, idx 282, n02123159 tiger cat
# 0.326172, idx 285, n02124075 Egyptian cat
# 0.099609, idx 281, n02123045 tabby, tabby cat
# 0.071777, idx 287, n02127052 lynx, catamount
# 0.041504, idx 331, n02326432 hare
####################################
# sample-2: classifier_bf16
###################################
./bin/cvi_sample_classifier_bf16 \
$MODEL_PATH/mobilenet_v2_bf16.cvimodel \
./data/cat.jpg \
./data/synset_words.txt
# TOP_K[5]:
# 0.314453, idx 285, n02124075 Egyptian cat
# 0.040039, idx 331, n02326432 hare
# 0.018677, idx 330, n02325366 wood rabbit, cottontail, cottontail rabbit
# 0.010986, idx 463, n02909870 bucket, pail
# 0.010986, idx 852, n04409515 tennis ball
############################################
# sample-3: 分类器融合预处理
############################################
./bin/cvi_sample_classifier_fused_preprocess \
$MODEL_PATH/mobilenet_v2_fused_preprocess.cvimodel \
./data/cat.jpg \
./data/synset_words.txt
# TOP_K[5]:
# 0.326172, idx 282, n02123159 tiger cat
# 0.326172, idx 285, n02124075 Egyptian cat
# 0.099609, idx 281, n02123045 tabby, tabby cat
# 0.071777, idx 287, n02127052 lynx, catamount
# 0.041504, idx 331, n02326432 hare
############################################
# sample-4: 分类器多批
############################################
./bin/cvi_sample_classifier_multi_batch \
$MODEL_PATH/mobilenet_v2_bs1_bs4.cvimodel \
./data/cat.jpg \
./data/synset_words.txt
# TOP_K[5]:
# 0.326172, idx 282, n02123159 tiger cat
# 0.326172, idx 285, n02124075 Egyptian cat
# 0.099609, idx 281, n02123045 tabby, tabby cat
# 0.071777, idx 287, n02127052 lynx, catamount
# 0.041504, idx 331, n02326432 hare
同时提供脚本作为参考,执行效果与直接运行相同,如下:
./run_classifier.sh
./run_classifier_bf16.sh
./run_classifier_fused_preprocess.sh
./run_classifier_multi_batch.sh
在cvitek_tpu_sdk/samples/samples_extra目录下有更多的samples,可供参考:
./bin/cvi_sample_detector_yolo_v3_fused_preprocess \
$MODEL_PATH/yolo_v3_416_fused_preprocess_with_detection.cvimodel \
./data/dog.jpg \
yolo_v3_out.jpg
./bin/cvi_sample_detector_yolo_v5_fused_preprocess \
$MODEL_PATH/yolov5s_fused_preprocess.cvimodel \
./data/dog.jpg \
yolo_v5_out.jpg
./bin/cvi_sample_detector_yolox_s \
$MODEL_PATH/yolox_s.cvimodel \
./data/dog.jpg \
yolox_s_out.jpg
./bin/cvi_sample_alphapose_fused_preprocess \
$MODEL_PATH/yolo_v3_416_fused_preprocess_with_detection.cvimodel \
$MODEL_PATH/alphapose_fused_preprocess.cvimodel \
./data/pose_demo_2.jpg \
alphapose_out.jpg
./bin/cvi_sample_fd_fr_fused_preprocess \
$MODEL_PATH/retinaface_mnet25_600_fused_preprocess_with_detection.cvimodel \
$MODEL_PATH/arcface_res50_fused_preprocess.cvimodel \
./data/obama1.jpg \
./data/obama2.jpg
//第6章/cvitek_tpu_sdk.py
需要如下文件:
1)cvitek_tpu_sdk_[cv182x|cv182x_uclibc|cv183x|cv181x_glibc32|cv181x_musl_riscv64_rvv|cv180x_musl_riscv64_rvv]].tar.gz
2)cvitek_tpu_samples.tar.gz
aarch 64位 (如cv183x aarch64位平台)
TPU sdk准备:
tar zxf host-tools.tar.gz
tar zxf cvitek_tpu_sdk_cv183x.tar.gz
export PATH=$PWD/host-tools/gcc/gcc-linaro-6.3.1-2017.05-x86_64_aarch64-linux-gnu/bin:$PATH
export TPU_SDK_PATH=$PWD/cvitek_tpu_sdk
cd cvitek_tpu_sdk && source./envs_tpu_sdk.sh && cd..
编译samples,安装至install_samples目录:
tar zxf cvitek_tpu_samples.tar.gz
cd cvitek_tpu_samples
mkdir build_soc
cd build_soc
cmake -G Ninja \
-DCMAKE_BUILD_TYPE=RELEASE \
-DCMAKE_C_FLAGS_RELEASE=-O3 \
-DCMAKE_CXX_FLAGS_RELEASE=-O3 \
-DCMAKE_TOOLCHAIN_FILE=$TPU_SDK_PATH/cmake/toolchain-aarch64-linux.cmake \
-DTPU_SDK_PATH=$TPU_SDK_PATH \
-DOPENCV_PATH=$TPU_SDK_PATH/opencv \
-DCMAKE_INSTALL_PREFIX=../install_samples \
..
cmake --build. --target install
arm 32位 (如cv183x平台32位、cv182x平台)
TPU sdk准备:
tar zxf host-tools.tar.gz
tar zxf cvitek_tpu_sdk_cv182x.tar.gz
export TPU_SDK_PATH=$PWD/cvitek_tpu_sdk
export PATH=$PWD/host-tools/gcc/gcc-linaro-6.3.1-2017.05-x86_64_arm-linux-gnueabihf/bin:$PATH
cd cvitek_tpu_sdk && source./envs_tpu_sdk.sh && cd..
如果docker版本低于1.7,则需要更新32位系统库(只需一次):
dpkg --add-architecture i386
apt-get update
apt-get install libc6:i386 libncurses5:i386 libstdc++6:i386
编译samples,安装至install_samples目录:
tar zxf cvitek_tpu_samples.tar.gz
cd cvitek_tpu_samples
mkdir build_soc
cd build_soc
cmake -G Ninja \
-DCMAKE_BUILD_TYPE=RELEASE \
-DCMAKE_C_FLAGS_RELEASE=-O3 \
-DCMAKE_CXX_FLAGS_RELEASE=-O3 \
-DCMAKE_TOOLCHAIN_FILE=$TPU_SDK_PATH/cmake/toolchain-linux-gnueabihf.cmake \
-DTPU_SDK_PATH=$TPU_SDK_PATH \
-DOPENCV_PATH=$TPU_SDK_PATH/opencv \
-DCMAKE_INSTALL_PREFIX=../install_samples \
..
cmake --build. --target install
uclibc 32位平台 (cv182x uclibc平台)
TPU sdk准备:
tar zxf host-tools.tar.gz
tar zxf cvitek_tpu_sdk_cv182x_uclibc.tar.gz
export TPU_SDK_PATH=$PWD/cvitek_tpu_sdk
export PATH=$PWD/host-tools/gcc/arm-cvitek-linux-uclibcgnueabihf/bin:$PATH
cd cvitek_tpu_sdk && source./envs_tpu_sdk.sh && cd..
如果docker版本低于1.7,则需要更新32位系统库(只需一次):
dpkg --add-architecture i386
apt-get update
apt-get install libc6:i386 libncurses5:i386 libstdc++6:i386
编译samples,安装至install_samples目录:
tar zxf cvitek_tpu_samples.tar.gz
cd cvitek_tpu_samples
mkdir build_soc
cd build_soc
cmake -G Ninja \
-DCMAKE_BUILD_TYPE=RELEASE \
-DCMAKE_C_FLAGS_RELEASE=-O3 \
-DCMAKE_CXX_FLAGS_RELEASE=-O3 \
-DCMAKE_TOOLCHAIN_FILE=$TPU_SDK_PATH/cmake/toolchain-linux-uclibc.cmake \
-DTPU_SDK_PATH=$TPU_SDK_PATH \
-DOPENCV_PATH=$TPU_SDK_PATH/opencv \
-DCMAKE_INSTALL_PREFIX=../install_samples \
..
cmake --build. --target install
riscv64位 musl平台 (如cv181x、cv180x riscv64位 musl平台)
TPU sdk准备:
tar zxf host-tools.tar.gz
tar zxf cvitek_tpu_sdk_cv181x_musl_riscv64_rvv.tar.gz
export TPU_SDK_PATH=$PWD/cvitek_tpu_sdk
export PATH=$PWD/host-tools/gcc/riscv64-linux-musl-x86_64/bin:$PATH
cd cvitek_tpu_sdk && source./envs_tpu_sdk.sh && cd..
编译samples,安装至install_samples目录:
tar zxf cvitek_tpu_samples.tar.gz
cd cvitek_tpu_samples
mkdir build_soc
cd build_soc
cmake -G Ninja \
-DCMAKE_BUILD_TYPE=RELEASE \
-DCMAKE_C_FLAGS_RELEASE=-O3 \
-DCMAKE_CXX_FLAGS_RELEASE=-O3 \
-DCMAKE_TOOLCHAIN_FILE=$TPU_SDK_PATH/cmake/toolchain-riscv64-linux-musl-x86_64.cmake \
-DTPU_SDK_PATH=$TPU_SDK_PATH \
-DOPENCV_PATH=$TPU_SDK_PATH/opencv \
-DCMAKE_INSTALL_PREFIX=../install_samples \
..
cmake --build. --target install
riscv64位 glibc平台 (如cv181x、cv180x riscv64位glibc平台)
TPU sdk准备:
tar zxf host-tools.tar.gz
tar zxf cvitek_tpu_sdk_cv181x_glibc_riscv64.tar.gz
export TPU_SDK_PATH=$PWD/cvitek_tpu_sdk
export PATH=$PWD/host-tools/gcc/riscv64-linux-x86_64/bin:$PATH
cd cvitek_tpu_sdk && source./envs_tpu_sdk.sh && cd..
编译samples,安装至install_samples目录:
tar zxf cvitek_tpu_samples.tar.gz
cd cvitek_tpu_samples
mkdir build_soc
cd build_soc
cmake -G Ninja \
-DCMAKE_BUILD_TYPE=RELEASE \
-DCMAKE_C_FLAGS_RELEASE=-O3 \
-DCMAKE_CXX_FLAGS_RELEASE=-O3 \
-DCMAKE_TOOLCHAIN_FILE=$TPU_SDK_PATH/cmake/toolchain-riscv64-linux-x86_64.cmake \
-DTPU_SDK_PATH=$TPU_SDK_PATH \
-DOPENCV_PATH=$TPU_SDK_PATH/opencv \
-DCMAKE_INSTALL_PREFIX=../install_samples \
..
cmake --build. --target install
//第6章/cvimodel_samples.py
需要如下文件:
1)cvitek_MLIR_ubuntu-18.04.tar.gz
2)cvimodel_samples_[cv182x|cv183x|cv181x|cv180x].tar.gz
3)cvitek_tpu_samples.tar.gz
TPU sdk准备:
tar zxf cvitek_MLIR_ubuntu-18.04.tar.gz
source cvitek_MLIR/cvitek_envs.sh
编译samples,安装至install_samples目录:
tar zxf cvitek_tpu_samples.tar.gz
cd cvitek_tpu_samples
mkdir build_soc
cd build_soc
cmake -G Ninja \
-DCMAKE_BUILD_TYPE=RELEASE \
-DCMAKE_C_FLAGS_RELEASE=-O3 \
-DCMAKE_CXX_FLAGS_RELEASE=-O3 \
-DTPU_SDK_PATH=$MLIR_PATH/tpuc \
-DCNPY_PATH=$MLIR_PATH/cnpy \
-DOPENCV_PATH=$MLIR_PATH/opencv \
-DCMAKE_INSTALL_PREFIX=../install_samples \
..
cmake --build. --target install
运行samples程序:
# envs
tar zxf cvimodel_samples_cv183x.tar.gz
export MODEL_PATH=$PWD/cvimodel_samples
source cvitek_MLIR/cvitek_envs.sh
# get cvimodel info
cd../install_samples
./bin/cvi_sample_model_info $MODEL_PATH/mobilenet_v2.cvimodel
其他samples运行命令参照EVB运行命令
BM168x测试指南
配置系统环境
如果是首次使用Docker, 那么请使用 开发环境配置 中的方法安装 并配置Docker。同时, 中会使用到 git-lfs, 如果首次使用 git-lfs 可执行下述命 令进行安装与配置(仅首次执行, 同时该配置是在用户自己系统中, 并非Docker 容器中):
$ curl -s https://packagecloud.io/install/repositories/github/git-lfs/script.deb.sh | sudo bash
$ sudo apt-get install git-lfs
获取 model-zoo 模型 1
在 tpu-MLIR_xxxx.tar.gz (tpu-MLIR的发布包)的同级目录下, 使用以下命令克隆 model-zoo 工程:
$ git clone --depth=1 需要如下文件:
1)cvitek_MLIR_ubuntu-18.04.tar.gz
2)cvimodel_samples_[cv182x|cv183x|cv181x|cv180x].tar.gz
3)cvitek_tpu_samples.tar.gz
TPU sdk准备:
tar zxf cvitek_MLIR_ubuntu-18.04.tar.gz
source cvitek_MLIR/cvitek_envs.sh
编译samples,安装至install_samples目录:
tar zxf cvitek_tpu_samples.tar.gz
cd cvitek_tpu_samples
mkdir build_soc
cd build_soc
cmake -G Ninja \
-DCMAKE_BUILD_TYPE=RELEASE \
-DCMAKE_C_FLAGS_RELEASE=-O3 \
-DCMAKE_CXX_FLAGS_RELEASE=-O3 \
-DTPU_SDK_PATH=$MLIR_PATH/tpuc \
-DCNPY_PATH=$MLIR_PATH/cnpy \
-DOPENCV_PATH=$MLIR_PATH/opencv \
-DCMAKE_INSTALL_PREFIX=../install_samples \
..
cmake --build. --target install
运行samples程序:
# envs
tar zxf cvimodel_samples_cv183x.tar.gz
export MODEL_PATH=$PWD/cvimodel_samples
source cvitek_MLIR/cvitek_envs.sh
# get cvimodel info
cd../install_samples
./bin/cvi_sample_model_info $MODEL_PATH/mobilenet_v2.cvimodel
其他samples运行命令参照EVB运行命令
BM168x测试指南
配置系统环境
如果是首次使用Docker, 那么请使用 开发环境配置 中的方法安装 并配置Docker。同时, 中会使用到 git-lfs, 如果首次使用 git-lfs 可执行下述命 令进行安装与配置(仅首次执行, 同时该配置是在用户自己系统中, 并非Docker 容器中):
$ curl -s https://packagecloud.io/install/repositories/github/git-lfs/script.deb.sh | sudo bash
$ sudo apt-get install git-lfs
获取 model-zoo 模型 1
在 tpu-MLIR_xxxx.tar.gz (tpu-MLIR的发布包)的同级目录下, 使用以下命令克隆 model-zoo 工程:
$ git clone --depth=1 https://github.com/sophgo/model-zoo
$ cd model-zoo
$ git lfs pull --include *.onnx,*.jpg,*.JPEG --exclude=""
$ cd../
如果已经克隆过 model-zoo 可以执行以下命令同步模型到最新状态:
$ cd model-zoo
$ git pull
$ git lfs pull --include "*.onnx,*.jpg,*.JPEG" --exclude=""
$ cd../
此过程会从 GitHub 上下载大量数据。由于具体网络环境的差异, 此过程可能耗时较长。
如果获得了SOPHGO提供的 model-zoo 测试包, 可以执行以下操作创建并 设置好 model-zoo。完成此步骤后直接获取 tpu-perf 工具。
$ mkdir -p model-zoo
$ tar -xvf path/to/model-zoo_.tar.bz2 --strip-components=1 -C model-zoo
https://github.com/sophgo/model-zoo
$ cd model-zoo
$ git lfs pull --include *.onnx,*.jpg,*.JPEG --exclude=""
$ cd../
如果已经克隆过 model-zoo 可以执行以下命令同步模型到最新状态:
$ cd model-zoo
$ git pull
$ git lfs pull --include "*.onnx,*.jpg,*.JPEG" --exclude=""
$ cd../
此过程会从 GitHub 上下载大量数据。由于具体网络环境的差异, 此过程可能耗时较长。
如果获得了SOPHGO提供的 model-zoo 测试包, 可以执行以下操作创建并 设置好 model-zoo。完成此步骤后直接获取 tpu-perf 工具。
$ mkdir -p model-zoo
$ tar -xvf path/to/model-zoo_.tar.bz2 --strip-components=1 -C model-zoo
//第6章/tpu-MLIR_xxxx.sh
$ tar zxf tpu-MLIR_xxxx.tar.gz
$ docker pull sophgo/tpuc_dev:latest
$ docker run --rm --name myname -v $PWD:/workspace -it sophgo/tpuc_dev:latest
运行命令后会处于Docker的容器中。
设置环境变量并安装 tpu-perf
使用以下命令完成设置运行测试所需的环境变量:
$ cd tpu-MLIR_xxxx
$ source envsetup.sh
该过程结束后不会有任何提示。之后使用以下命令安装 tpu-perf:
$ pip3 install../tpu_perf-x.x.x-py3-none-manylinux2014_x86_64.whl
运行测试
编译模型
model-zoo 的相关 confg.yaml 配置了SDK的测试内容。例如: resnet18的 配置文件为 model-zoo/vision/classification/resnet18-v2/config.yaml。
执行以下命令, 运行全部测试样例:
$ cd../model-zoo
$ python3 -m tpu_perf.build --MLIR -l full_cases.txt
此时会编译以下模型:
* efficientnet-lite4
* mobilenet_v2
* resnet18
* resnet50_v2
* shufflenet_v2
* squeezenet1.0
* vgg16
* yolov5s
命令正常结束后, 会看到新生成的输出文件夹(测试输出内容都在该文件夹中)。 修改 输出文件夹的属性, 以保证其可以被Docker外系统访问。
$ chmod -R a+rw output
//第6章/chmod_rw_output.sh
$ chmod -R a+rw output
首先, 在工具链环境服务器host 系统安装 nfs 服务:
$ sudo apt install nfs-kernel-server
在 /etc/exports 中添加以下内容(配置共享目录):
/the/absolute/path/of/model-zoo *(rw,sync,no_subtree_check,no_root_squash)
其中 * 表示所有人都可以访问该共享目录, 也可以配置成特定网段或 IP 可访问, 如:
/the/absolute/path/of/model-zoo 192.168.43.0/24(rw,sync,no_subtree_check,no_root_squash)
然后执行如下命令使配置生效:
$ sudo exportfs -a
$ sudo systemctl restart nfs-kernel-server
另外, 需要为 dataset 目录下的图片添加读取权限:
chmod -R +r path/to/model-zoo/dataset
在 SOC 设备上安装客户端并挂载该共享目录:
$ mkdir model-zoo
$ sudo apt-get install -y nfs-common
$ sudo mount -t nfs:/path/to/model-zoo./model-zoo
这样便可以在 SOC 环境访问测试目录。SOC 测试其余的操作与 PCIE 基本一致, 请参考下 文进行操作; 运行环境命令执行位置的差别, 已经在执行处添加说明。
运行测试
运行测试需要在 Docker 外面的环境(此处假设已经安装并配置好了1684X设备与 驱动)中进行, 可以退出 Docker 环境:
$ exit
1. PCIE 板卡下运行以下命令, 测试生成的 bmodel 性能。
$ pip3 install./tpu_perf-*-py3-none-manylinux2014_x86_64.whl
$ cd model-zoo
$ python3 -m tpu_perf.run --MLIR -l full_cases.txt
注意:如果主机上安装了多块SOPHGO的加速卡,可以在使用 tpu_perf 时,通过添加 --devices id 来指定 tpu_perf 的运行设备。如:
$ python3 -m tpu_perf.run --devices 2 --MLIR -l full_cases.txt
1. SOC 设备使用以下步骤, 测试生成的 bmodel 性能。
从 https://github.com/sophgo/tpu-perf/releases 地址下载最新的 tpu-perf tpu_perf-x.x.x-py3-none-manylinux2014_aarch64.whl 文件到SOC设备上并执行 以下操作:
$ pip3 install./tpu_perf-x.x.x-py3-none-manylinux2014_aarch64.whl
$ cd model-zoo
$ python3 -m tpu_perf.run --MLIR -l full_cases.txt


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 全程不用写代码,我用AI程序员写了一个飞机大战
· DeepSeek 开源周回顾「GitHub 热点速览」
· 记一次.NET内存居高不下排查解决与启示
· MongoDB 8.0这个新功能碉堡了,比商业数据库还牛
· .NET10 - 预览版1新功能体验(一)
2023-04-17 智能驾驶芯片成本估算市场分析
2022-04-17 IGBT功率半导体器件
2021-04-17 Tvm一些基本技术
2021-04-17 北汽蓝谷和北汽新能源
2020-04-17 H.264/H265码流解析
2020-04-17 单目摄像头检测6D姿态
2020-04-17 毫米波雷达分析