
ADAS汽车智能化+网联化(下)
2.2.3 智车之“角”:毫米波雷达 毫米波即电磁波,工作频率为 30-300GHz,波长 1-10mm,毫米波雷达测速和测距原理都是 基于多普勒效应,通过入射波和反射波频率相减,得到二者差拍频率,通过判断差拍频率高 低从而判断障碍物距离。
毫米波雷达的可用频段有 24GHz、60GHz、77GHz、79GHz,主流车载毫米波雷达使用 24G Hz (用于中短距离雷达,15-30m)和 77GHz(用于长距离雷达,100-200m),相比于 24GHz,77GHz 毫米波雷达在性能和体积上都更有优势,其探测物体分辨率可提高 2-4 倍,测速和测 距精度可提高 3-5 倍,体积缩小了 1/3,更方便部署,并且带宽更大、功率更高、探测距离更 远,因此未来趋势将逐渐从 24GHz 向 77GHz(76-81GHz)过渡。
毫米波雷达的优势在于不受天气影响,即使是恶劣天气和光照情况下也能正常工作,穿透烟 雾、雨雪、灰尘能力强,具有全天候、全天时的工作特性,且探测距离远、精度较高、被广 泛用于车载距离探测,具体应用包括自适应巡航、碰撞预警、自动紧急制动、盲区探测等。 但劣势同样明显,包括无法识别物体颜色,视场角较小,需要多个雷达组合使用,同时对行 人的反射波较弱,难以识别,并且对金属表面非常敏感,一个弯曲的金属表面会被误认为是 一个很大面积的表面,在隧道里效果不佳。未来随着搭载毫米波雷达车辆增加,相近频率的 毫米波会相互干扰、降低了信噪比、严重时甚至会使雷达“致盲”。
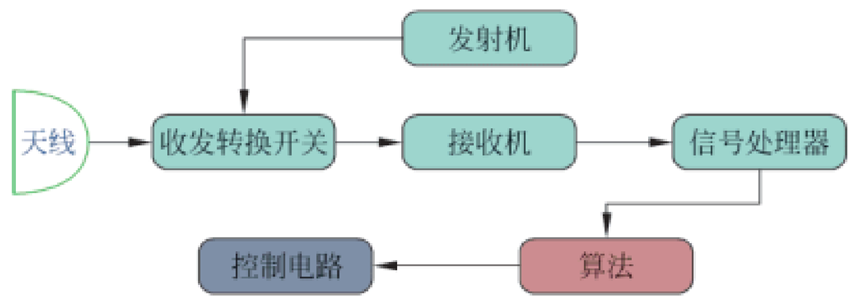
图表 59:毫米波雷达工作原理
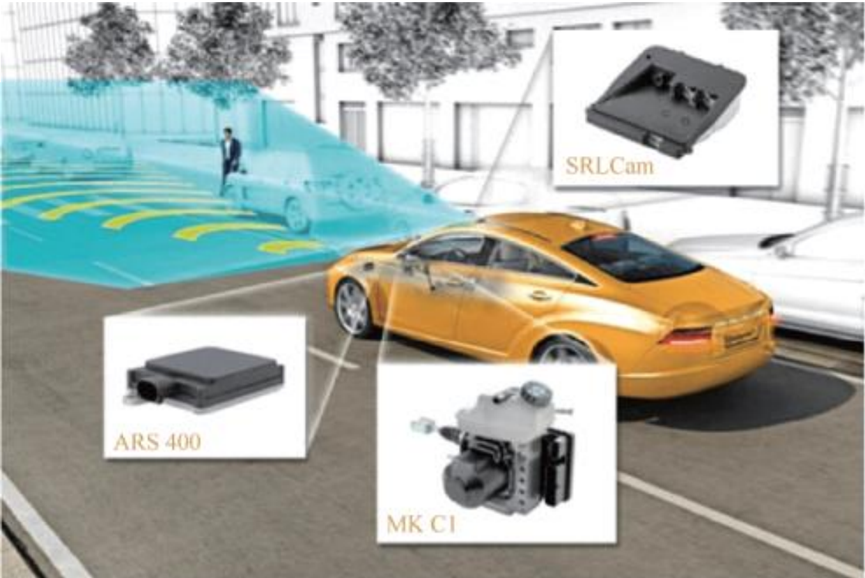
图表 60:毫米波雷达示意图
根据 DIGITIMES Resarch 数据,全球毫米波雷达市场规模保持稳步增长态势,2021 年为 118.1 亿美元,其中中短距 55.1 亿美元,长距 63 亿美元,预计到 2022 年将达到 159. 6 亿美 元,其中中短距 84 亿美元,长距 75.6 亿美元。
根据佐思产研数据,全球汽车毫米波雷达厂商主要为海外厂商,其中博世占比 30%,排名第 1;大陆占比 28%,排名第 2;安波福占比 15%,排名第 3。中国车载毫米波雷达行业起步 较晚,行业仍处于初级发展阶段,走在前列的公司主要有华域汽车、德赛西威、纳瓦电子、 智波科技、森思泰克、华为等。
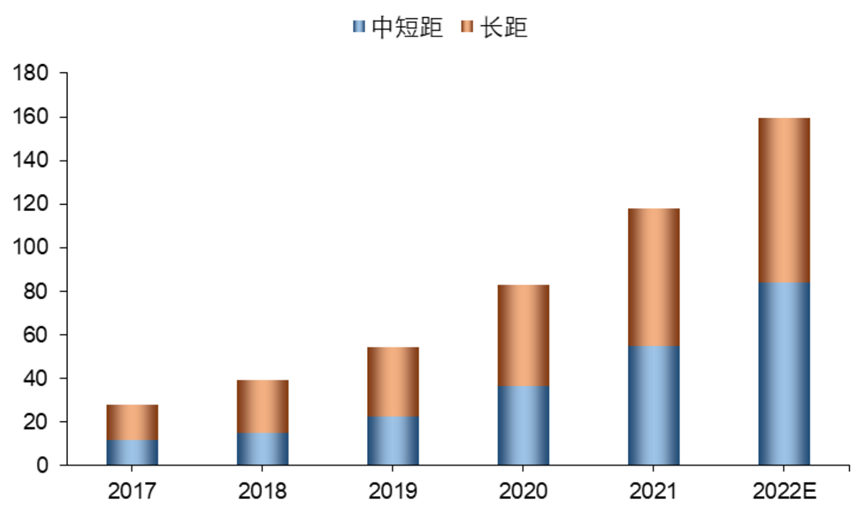
图表 61:2017-2022 年全球毫米波雷达市场规模(亿美元)

图表 62:全球汽车毫米波雷达厂商市占率
目前传统毫米波雷达仅可探测距离、方位以及速度三个维度,而最新的 4D 毫米波雷达在传 统功能基础上,多出了高度这一维信息,即具备测高能力,因此可以有效地解析空中的天桥、 路牌,地面的减速带、金属井盖等目标的轮廓和类别,进而感知传统毫米波雷达无法识别的 细小物体、静止物体或者横向移动的障碍物等。此外,还提升了探测距离和点云密度,有望 于 2022 年开启商用。 4D 毫米波雷达成本与传统毫米波雷达相近,但性能方面可媲美低线束激光雷达,在 L4/L5 级 别自动驾驶将可能发挥重要作用,但是目前还处于发展早期,在未来自动驾驶多传感器融合 方案中,至于是否能与激光雷达形成替代关系,目前尚无定论。目前已有多个厂商投入到 4D 毫米波雷达研发中,不仅有大陆、安波福、采埃孚等传统毫米波雷达巨头,也有 Mobiley e、 Waymo、华为等科技巨头,还有 Arbe、傲酷、华域汽车、森思泰克、纵目科技等新兴玩家。
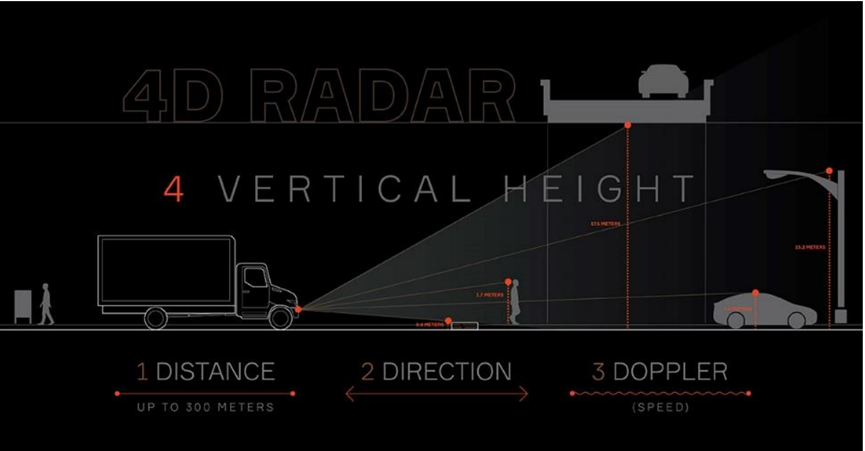
图表 63:4D 毫米波雷达探测维度
2.2.4 智车之“角”:激光雷达 激光雷达通过发射激光,然后根据反射激光的时间差来探测物体的距离,探测距离可达 300m , 工作频率为 100000GHz,波长集中在 600-1000nm 之间,由于其波长短精度高,可以探测 物体距离和表面形状,测量精度可达厘米级。此外,还可用于车辆定位,自动驾驶汽车定位 除了依赖 GNSS 系统,还依赖激光雷达生成的点云与数据库中的高精地图做对比,从而得出 汽车所在精确位置,精度可达厘米级。
激光雷达的优势在于能够很好的探测障碍物的距离、大小、表面形状,提高了障碍物检测的 准确性,算法比摄像头更为简单,抗有源干扰能力强,定向性好,测量距离远,时间短,大 多数整车厂、Tier1 认为激光雷达是 L3 及以上级别自动驾驶必备的传感器。当然也存在一定 劣势,包括在雨雪云雾天气下衰减严重,后期处理需要大量的坐标系转换,对硬件(CP U、 GPU、FPGA)要求高,技术门槛和成本较高。

图表 64:激光雷达工作原理
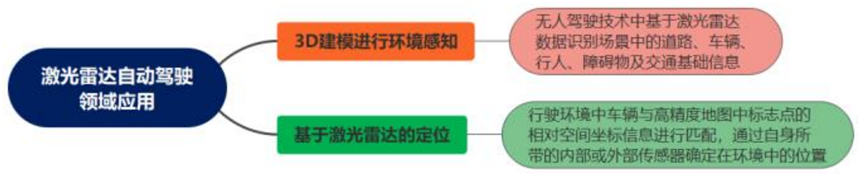
图表 65:激光雷达应用:环境感知+定位
激光雷达产业链中,根据盖世汽车数据,上游包括激光发射、激光接收、扫描系统和信息处 理,具体而言,激光发射包括激光器、发射光学系统;激光接收包括光电探测器、接收光学 系统;扫描系统包括旋转电机、扫描镜、MEMS 微振镜;信息处理包括放大器、数模转换、 FPGA。中游则是激光雷达的组装制造。下游应用较为广泛,包括无人驾驶汽车、地图测绘、 无人机、军事领域等。


图表 66:激光雷达产业链
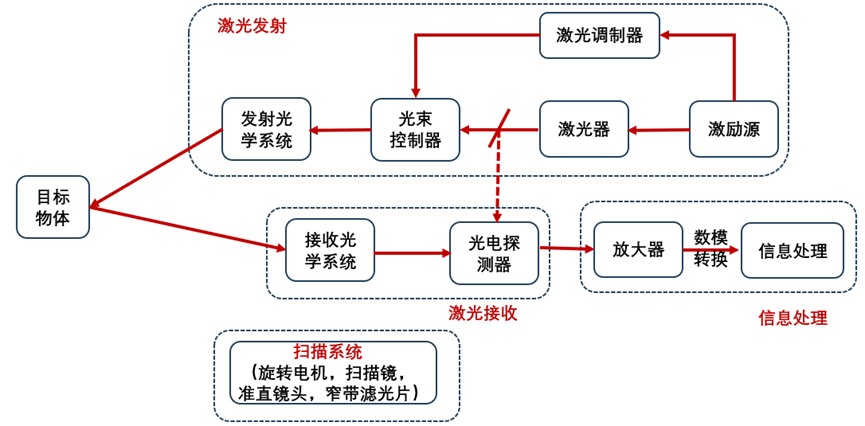
图表 67:激光雷达核心模块
激光雷达的显性参数包含测远能力、点频、角分辨率、视场角范围、测距精准度、功耗、集 成度(体积及重量)等。
图表 68:激光雷达显性参数

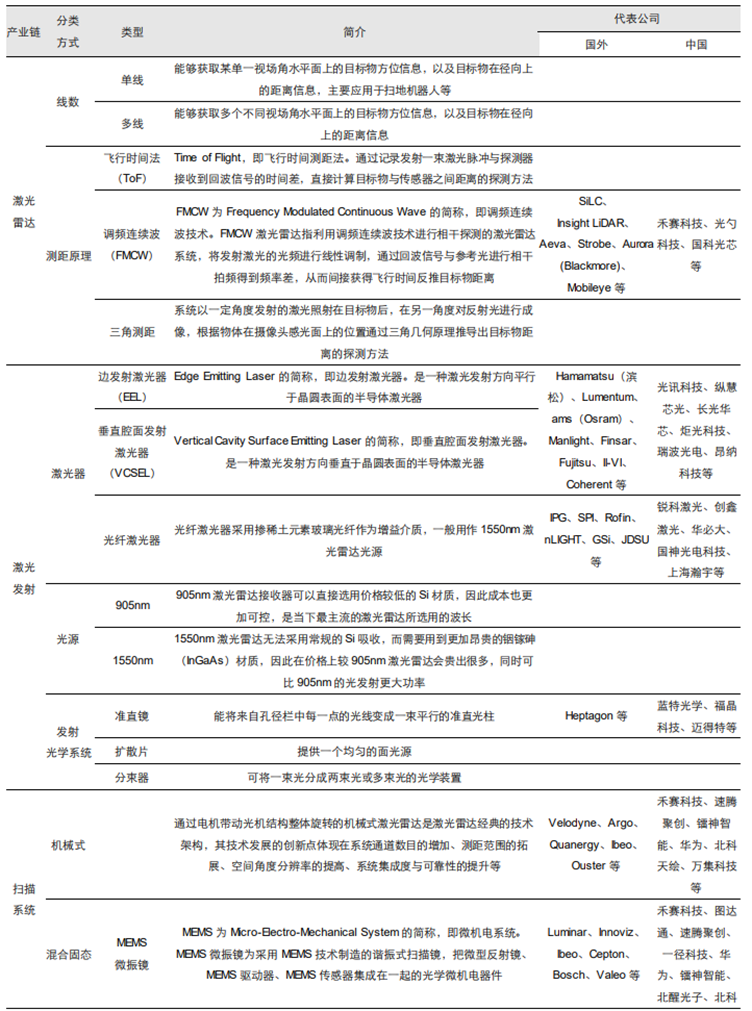
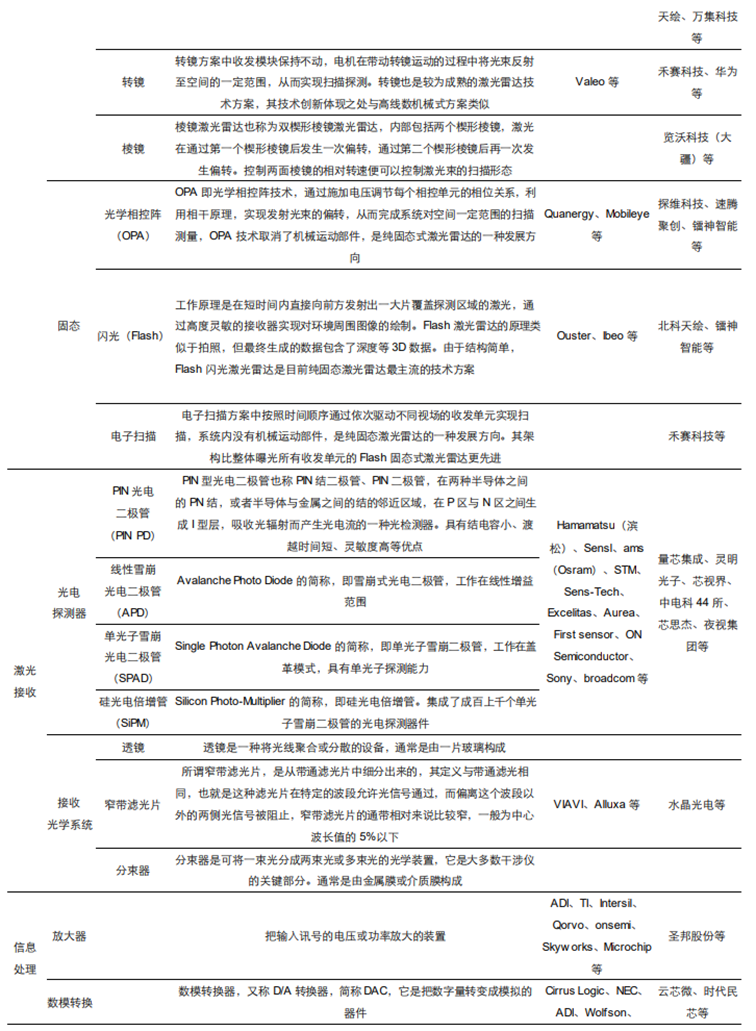
图表 69:激光雷达产业链主要厂商
不同技术特点对比及趋势:
1)单线与多线
激光雷达按照线数来分,分为单线和多线。单线激光雷达是指激光源发出的线束是单线的,
扫描出来就是一个二维平面的图(2D 激光),目前主要应用于机器人领域,以服务机器人居
多,可以帮助机器人规避障碍物。相比多线激光雷达,单线激光雷达在角频率及灵敏度上反
应更快捷,扫描速度快、分辨率强、可靠性高,所以,在测试周围障碍物的距离和精度上都
更加精准,同时成本更低。但单线雷达只能平面式扫描,不能测量物体高度,当前主要应用
于我们常见的扫地机器人、送餐机器人以及酒店服务机器人身上。
多线激光雷达是指同时发射及接收多束激光的激光旋转测距雷达,市场上目前有 4 线、8 线、16 线、32 线、64 线、96 线、128 线等,多线激光雷达可以识别物体的高度信息并获取周围环境的 3D 扫描图,主要应用于无人驾驶领域,对于激光雷达而言,线束越多,对目标物的刻画越详细。
在无人驾驶领域,多线激光雷达主要有以下两个核心作用:
3D 建模及环境感知:通过多线激光雷达可以扫描到汽车周围环境的 3D 模型,运用相关算法对比上一帧及下一帧环境的变化,能较为容易的检测出周围的车辆及行人。
SLAM 定位加强:同步建图(SLAM)是其另一大特性,通过实时得到的全局地图与高精度地图中的特征物进行比对,能加强车辆的定位精度并实现自主导航。
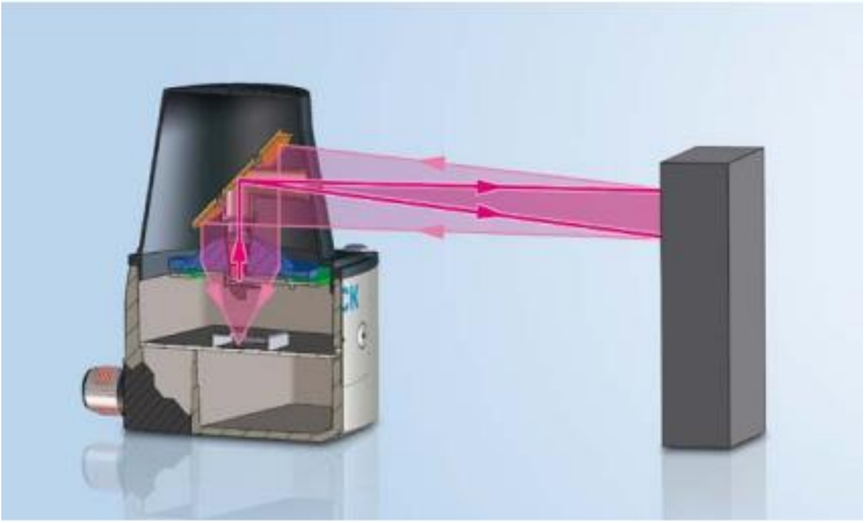
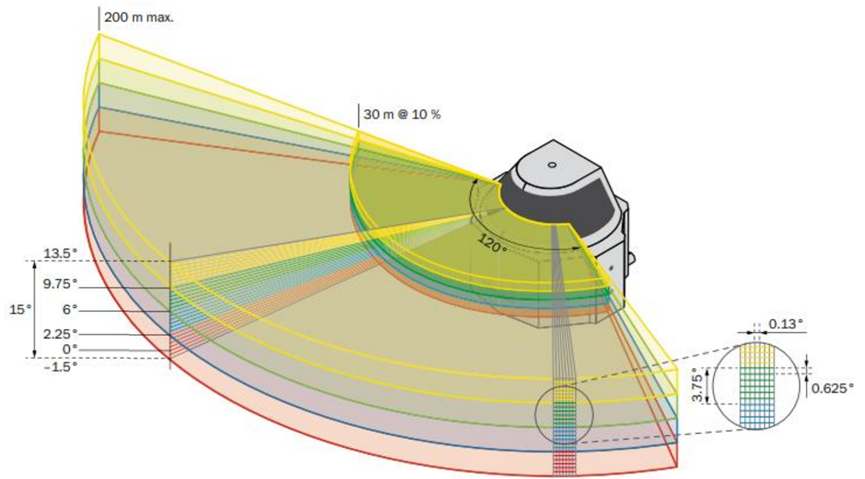
对于激光雷达而言,视场角(Field Of View,FOV)越大,能够探测的范围越广。多线激光
雷达中,机械式水平视场角为 360°,混合固态/固态激光雷达水平视场角大约为 120°,垂直视场角大约为 25°-40°。
图表 71:单线(2D)激光雷达原理
图表 72:多线(3D)激光雷达光线图

图表 73:单线扫描 VS 多线扫描
图表 74:水平与垂直视场角(FOV)
2)ToF 与 FMCW 激光雷达按照测距方法的不同,可以分为飞行时间(Time of Flight,ToF)测距法、基于相干 探测的 FMCW 测距法以及三角测距法等,其中 ToF 与 FMCW 在室外阳光下探测距离远 (100~250m),更适合应用于车载激光雷达。目前市场车载中长距激光雷达的主流方案是 ToF,FMCW 激光雷达大多处于概念机的阶段,而且大多采用分立的光学组件,分立组件通 常尺寸较大,随之而来的还有系统可靠性、生产成本、功耗等诸多问题,但 FMCW 激光雷达 具有可直接测量速度信息以及抗干扰(包括环境光和其他激光雷达)的优势。当前装载激光 雷达车辆并不多,随着激光雷达渗透率提升,FMCW 抗干扰的优势就体现出来,此外整机和 上游产业链日渐成熟亦将带动成本下降,因此 FMCW 激光雷达是未来发展的一大趋势。
图表 75:ToF 与 FMCW 性能对比

3)EEL 与 VCSEL
对于激光雷达而言,发射光源有很多种,按工作介质不同,激光器分为固体激光器、气体激 光器、染料激光器、半导体激光器、光纤激光器和自由电子激光器 6 种。固体脉冲功率大, 转换效率最低(10%)。气体激光器效率低(20%)、功率低,体积庞大,但是可靠性好、光 束质量高。半导体激光器光束质量较差,但是转换效率高(30%-40%),功耗、体积和成本 都适合车载应用。如果对光束质量要求高,则可以采用半导体泵浦的光纤激光器(转换效率 20%-30%)。目前常见的几种光源主要包括边发射激光器(EEL)、垂直腔面发射激 光器 (VCSEL)、固体激光器以及光纤激光器等。
固体激光器采用固体激光材料作为增益介质,是闪光式车载激光雷达(Flash LiDAR)技术路线 的激光光源方案,能够实现大角度视场(如 125°x 25°),并且均匀照射,满足车规级高低温、 震动、寿命等可靠性要求,常见于闪光式车载激光雷达(Flash LiDAR)。
半导体激光器采用半导体材料作为增益介质,一般是 GaAs, AlGaAs, InGaAs 等,常见的有 EEL 和 VCSEL。EEL(Edge Emitting Laser)是边发射激光器,是一种激光发射方向平行于 晶圆表面的半导体激光器,波长以 905nm 为主,常见于扫描式激光雷达,包括机械式和 MEMS 激光雷达。VCSEL(Vertical-cavity Surface-emitting Laser)是垂直腔面发射激光器,是一 种以半导体为基础的激光二极管,从其顶面垂直发射高效光束,制造工艺与 EEL 相兼容,且 大规模制造的成本很低,生长结构更易于提高输出功率,还为各种复杂设计提供了可能,当 前波长以 810nm、850nm 和 940nm 为主。
光纤激光器采用掺稀土元素玻璃光纤作为增益介质,一般用作 1550nm 激光雷达光源,1550 nm 配合调频连续波(FMCW)的技术,不仅可以检测距离,同时可以利用多普勒频移来测 量物体的速度。 传统的 VCSEL 激光器存在发光密度功率低的缺陷,导致只在对测距要求近的应用领域有相 应的激光雷达产品(通常小于50米)近年来国内外多家 VCSEL 激光器公司纷纷开发了多层结 VCSEL 激光器,将其发光功率密度提升了 5~10 倍,这为应用 VCSEL 开发长距激光雷达提 供了可能,此外 VCSEL 体积小,结合其平面化所带来的生产成本和产品可靠性方面的收益,
VCSEL 未来将有望逐渐取代 EEL。
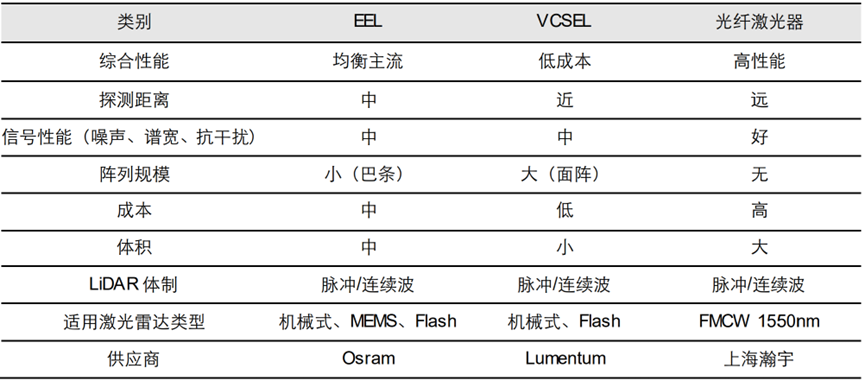
图表 76:EEL/VCSEL/光纤激光器对比
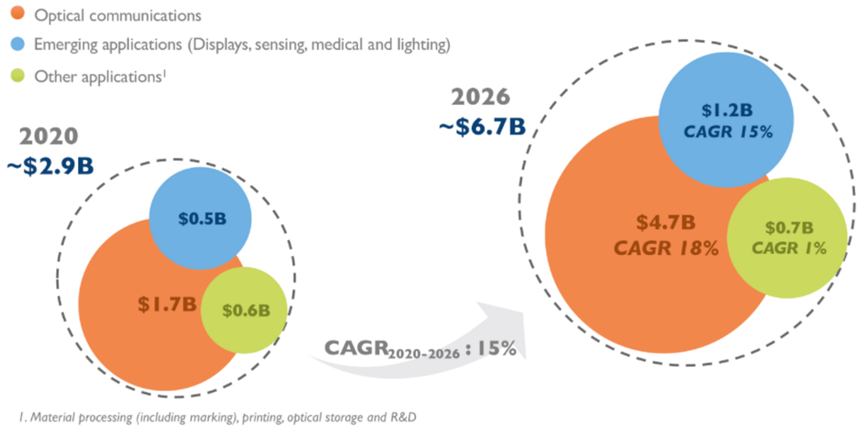
目前 EEL 仍占据主流,根据 Yole 数据,2020-2026 年,全球 EEL 市场规模预计将从 29 亿 美元增长到 67 亿美元,CAGR 为 15%。其中光通信规模最大,预计将从 17 亿美元增长到 47 亿美元,CAGR 为 18%;显示、传感、医疗和照明领域预计将从 5 亿美元增长到 12 亿美 元,CAGR 为 15%。
图表 77:2020-2026 年 EEL 市场规模(分应用领域)
根据麦姆斯咨询数据,VCSEL 下游各应用领域中,传感占比最大,为 75%,其次是通信, 占比 24%,此外还包括制造领域的工业热处理、激光打印,以及计时领域的原子钟等。对于 传感应用的 VCSEL,2021 年市场规模为 10.3 亿美元,在手机、汽车等下游需求拉动下,预 计到 2024 年将增长至 17.3 亿美元。

