

GPU计算性能参数分析
GPU计算性能参数分析
单核CPU无论在PC端,还是服务器上,基本上已经退出历史舞台,目前主流的计算平台是使用多核(multiple cores)的CPU,以及众核(many cores)的GPU。另外处理器与内存访问速度差距也不断增大,为克服访存瓶颈,主要采用两种方法。其中多核CPU与单核CPU,都是利用Cache来掩盖访问系统内存的延迟,以减轻访存带宽的压力,其芯片的较大面积也都贡献给Cache。在另一端,GPU通过同时运行很多简单的线程,不使用或者只利用相对较小的Cache,而主要通过线程间的并行(Thread Level Parallelism, TLP)来隐藏内存访问延迟,当一部分线程因为访存停滞的时候,另一部分线程会接着执行,使得处理单元不会空闲下来。
目前的异构计算平台,同时采用这两种截然不同的架构,使得性能预测和优化都不太容易,面对一个给定的计算负载,应该如何分发能够达到性能最佳?对芯片架构师而言,在面积受限的芯片上,怎样合理部署处理单元、Register File和Cache等等也是让人挠头的事情。希望能够为理解优化性能提供参考,定义了一个统一仿真模型,可以容纳延展这两种不同特点的架构设计。这个模型对应一个想象的混合计算平台,该平台由很多简单的处理单元,以及较大的共享缓存构成,通过灵活配置一系列参数,包括处理单元个数、缓存大小以及缓存和内存的访问延迟等等,可以观察不同参数变化,对计算性能的影响。
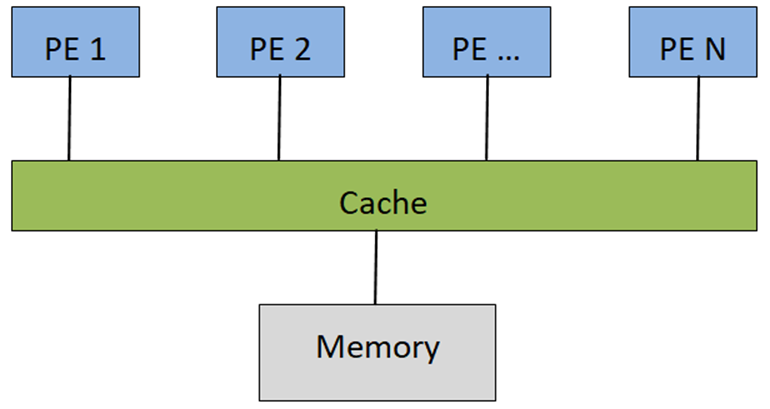
为保持模型简单,论文假设所有线程相互不共享数据,且系统内存带宽足够大。如下图所示,当线程数量较少的时候,随着线程数量增加,性能开始提升,而当线程数量到达转折点,Cache不能够容纳所有线程的工作集时,性能反而下降。之后,随着线程数量越来越多,由于有足够的线程来掩盖Cache访问不命中带来内存访问延迟,性能又接着上升,直达到平台可获得的最大性能。可以认为MC Region对应多核CPU的情形,而MT Region自然对应有超多线程的GPU,MC Region和MT Region之间的性能波谷区域,在架构设计和程序优化中,都是要努力避免的。

以下具体推导下参数曲线对应的公式,下表列出计算模型涉及的参数,左边是平台相关的,右边跟运算任务有关。

GPU计算
从处理单元设计和存储层次结构两个方面,探讨GPU不同于CPU的特点,再次确认反复申明的GPU,更重视整体的Throughput,而CPU更在乎具体任务的Latency。CPU和GPU从一开始就是为不同的目标而设计,CPU虽然也可以同时执行多个线程,但其旨在高效地处理串行指令,通过许多复杂技术优化,提高指令级并行,以便可以尽快执行串行程序。GPU同时执行成千上万个线程,牺牲单个线程性能换取整体性能最大化。下图对CPU与GPU的抽象架构进行了比对,其中Control是控制器、Core是处理单元、Cache指的是各级缓存、DRAM就是内存。可以看到GPU设计者将更多的晶体管用作执行单元,而不是像CPU那样用作复杂的控制逻辑和缓存。

在下面内容里,会具体讨论这两种设计面向带来的影响,尽量不拘泥具体产商的特定GPU产品,而是希望能给出一般的指引,但是因为文本材料的优势,以及在通用计算领域明显的优势地位,大概还是不能脱离Nvidia GPU的语境, AMD GPU的处理单元设计细节与Nvidia有较大不同,以后可以专文讨论。
SIMT和硬件多线程
根据计算机历史上有名的的费林分类法(Flynn's Taxonomy),如下图所示计算机体系架构可以简单分为四类,分别是:
- 单一指令流单一数据流计算机(SISD, Single Instruction Single Data)
- 单一指令流多数据流计算机(SIMD, Single Instruction Multiple Data)
- 多指令流单一数据流计算机(MISD, Multiple Instruction Single Data)
- 多指令流多数据流计算机(MIMD, Multiple Instruction Multiple Data)

单核CPU可以归类为SISD,多核CPU属于MIMD。重点关注的SIMD指的是采用一个控制器来控制多个处理单元,同时对一组数据的元素分别执行相同的操作从而实现空间上并行的技术。传统CPU的指令扩展SSE和NEON都属于典型的SIMD。现代GPU在SIMD基础上发展出SIMT(Single Instruction Multiple Thread)的执行架构。传统SIMD是一个线程调用向量处理单元(Vector ALU)执行向量指令来操作向量寄存器完成运算,而SIMT往往由一组标量处理单元(Scalar ALU)构成,每个处理单元对应一个硬件线程,所有处理单元共享指令预取/译码模块,并接收同一指令共同完成SIMD类型运算,运行其上的线程,可以有自己的寄存器堆,独立的内存访问寻址以及执行分支。以Nvida CUDA为例来,介绍SIMT是如何运作的。下图是有关分发CUDA的计算任务到GPU硬件上执行,展示了软硬件视角各个层级的对应关系。

先介绍层级图右面的GPU硬件层次,CUDA的GPU有很多SM(Streaming Multiprocesso)组成。一个SM又有很多SP(Streaming Processor)构成,SP是每个线程具体执行指令所在,SP也采用流水线设计,提高指令级并行,一般都是顺序执行,很少使用分支预测、动态执行等复杂技术。

在GPU通用计算语境下,GPU设备上执行的程序被称为Kernel,针对某个Kernel分发的所有线程,都执行相同的程序,这些线程被组织成一系列层次结构,也就是Grid和Block,如层级图左边所示。Grid规定各个维度Block的数量,Block规定各个维度线程的数量,尺寸大小都是在CUDA程序中分发Kernel时指定。下图程序中vecAdd就是Kernel程序,Kernel的分发是由<<<...>>>语法定义,其中规定了要分发的Kernel程序,Grid和Block的尺寸,以及Kernel程序的参数。

在实际执行过程中,GPU会以Block为单位,把相同Block的线程分配给同一个SM进行运算,Block中的线程可以通过Shared Memory交换数据(注:Shared Memory访问性能类似L1,与Cache由硬件控制对软件透明不同,Shared Memory由软件显式移动数据),并支持相互同步操作。在硬件内部,Block进一步会被为分组成Warp,Warp是GPU硬件最小调度单位,Warp内的线程被分配给SP,按照SIMD的模式工作,也就是这些线程共享同样的PC(程序计数器),以锁步(Lockstep)的方式执行指令。目前支持CUDA的GPU,其Warp大小都是32,SM中SP的数量可能只有8或者16,在这种情况下,一条指令Warp需要跨几个时钟分批执行。再来看下GPU硬件可以支持的线程数量,以Fermi GF100为例,该GPU一共有16个SM,每个SM最多可以容纳48个Warp,也就是1536个线程,整个GPU可以支持24576 个线程同时在线。可以与CPU对照下,消费级CPU一般有2~8个核,就算打开Hyperthreading,一共也就支持十几个硬件线程同时在线。为了避免一些高延迟指令引起处理单元流水线停顿,CPU和GPU采取了完全不同的做法。
- CPU的做法是一方面穷尽所能充分挖掘指令级并行来规避,另一方面通过各级Cache来掩盖访问内存延迟,万不得已CPU才会切换到别的硬件线程执行。硬件线程数量太多切换太频繁,即使有助于整体吞吐却恶化单个线程的延迟,对CPU设计来说也是不可接受的,所以,可以看到Hyperthread的数目一般都比较少。
- GPU的做法是另外一种思路,大规模数据并行带来海量的可执行线程,GPU完全可以通过切换到别的线程Warp,规避指令延迟带来处理单元的停顿。这种切换会非常频繁,需要在很短时间完成(比如一个时钟),所以无论每个线程执行需要的的寄存器堆,还是Block之内线程的Shared Memory,从一开始就要分配妥当,切换过程中线程上下文一直驻留,直到线程或者整个Block执行结束才能释放。所以相比CPU,GPU的Register File大小非常惊人,而其处理单元的设计却可以异常简单。
GPU的Memory Hierarchy
一方面GPU通过同时运行很多简单的线程,不使用或者只利用相对较小的Cache,而主要通过线程间的并行来隐藏内存访问延迟。另一方面显存带宽对整体计算吞吐又有重要意义,直接关系到GPU性能伸缩能力。所以,如下图所示,GPU存储层次设计的时候,相比Latency,更重视Throughput,而且各级存储容量相对偏小。

以Fermi GF100 GPU为例,下图是其存储层次结构,Fermi GPU是CUDA GPU第一次添加L1和L2的支持,其中L1和Shared Memory共享同一块片上内存,每个SM各64K大小,可以根据要求以48K/16K或者16K/48K在L1和Shared Memory之间分配。
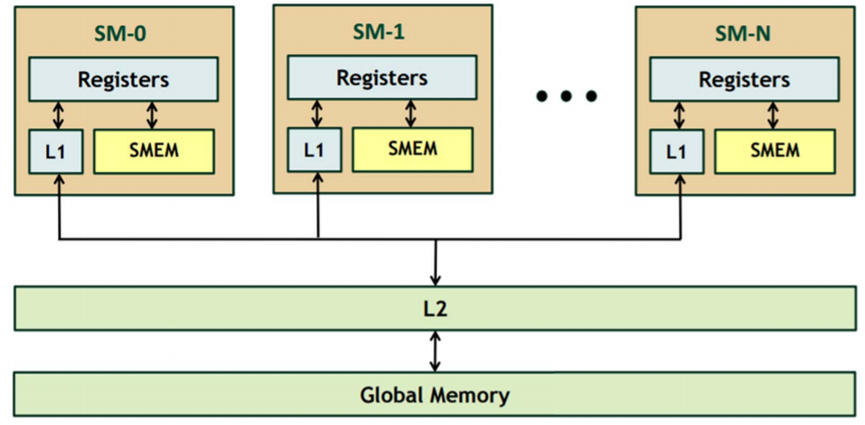
下面表格是几代CUDA GPU的L1、L2和Register File大小配置。可以看到,最早的CUDA GPU,也就是G80都没有通用的L1和L2,只有16K的Shared Memory。至于为什么添加Cache的支持,主要是考虑到对某些应用来说,可能没有足够的数据并行来掩藏访存延迟,而对另外一些应用其数据重用模式不可预测,无法有效利用软件控制的Shared Memory,总之,为了让GPU变得更通用,能够兼容更多的计算范式。

对GF100,RF大小总共为2048K,L1为48x16=768K,L2也是768K,RF反而比L1和L2都要大,而L1和L2差不多,其它GPU也有类似现象。
参考资料:
- Many-core vs many-thread machines: Stay away from the valley
- Cuda C Programming Guide
- CUDA Warps and Occupancy
- SIMD < SIMT < SMT: parallelism in NVIDIA GPUs
- The Top 10 Innovations in the New NVIDIA Fermi Architecture, and the Top 3 Next Challenges
GPU指令集技术分析
本文将两篇文章整理了一下。
参考文章链接如下:
https://zhuanlan.zhihu.com/p/391238629
https://zhuanlan.zhihu.com/p/166180054
一.GPGPU- 指令执行设计
本节主要内容:
- GPGPU指令执行简介
- GPGPU指令执行流水线
- GPGPU指令执行吞吐的影响因素
- GPGPU指令执行的特点
- 指令设计中的一些原则与思路
- 指令长度的问题
- 指令集设计与ILP的一些相关性
- 复合操作与附加操作
- 立即数操作数和Constant Memory操作数
- 格式的通用性与信息具体化
- 简单聊聊一些具体的指令
- FMA, MUL, ADD 系列
- IMAD, LEA, IADD3
- LOP3
- MUFU
- FSETP
- LDG/STG, LDS/STS, LDL/STL
- BAR
- 结语
二.CUDA微架构与指令集-指令发射与warp调度
CUDA指令的发射和warp调度问题。
l 指令发射的基本逻辑,主要是指令发射需要满足的条件,几代架构发射指令的一些简单描述等等。
l control codes,主要是它与指令发射和warp调度的关系。
l warp Scheduler的功能。
l 峰值算力的计算方法和达成条件。
现在分开来叙述
一.GPGPU- 指令执行设计
GPGPU指令吞吐和指令集设计的一些问题。NV GPU的机器码指令集叫SASS。
指令集是微架构与用户对接的途径。指令集相当于硬件提供给软件的API(或者也可以认为指令集是输入前端,微架构是执行后端)。按照
GPGPU指令执行简介
GPGPU指令执行流水线
首先,先简单介绍一下通用处理器的指令执行逻辑。对RISC V一种简单的五级流水线实现的描述:
- Instruction fetch cycle (IF):主要是获得Program Counter对应的指令内容。
- Instruction decode/register fetch cycle (ID):解码指令,同时读取输入寄存器的内容。由于RISC类指令的GPR编码位置相对固定,所以可以直接在解码时去读取GPR的值。
- Execution/effective address cycle (EX):这是指令进入执行单元执行的过程。比如计算memory地址的具体位置(把base和offset加起来),执行输入输出都是GPR或输入含立即数的ALU指令,或者是确认条件跳转指令的条件是否为真等。
- Memory access (MEM):对于load指令,读取相应的内存内容。对于store指令,将相应GPR的值写入到内存地址处。RISC类指令集通常都是load-store machine,ALU指令不能直接用内存地址做操作数(只能用GPR或立即数),因而通常ALU指令没有memory access。
- Write-back cycle (WB):将相应的ALU计算结果或memory load结果写入到相应的GPR中。
与复杂的CISC指令集相比,多数GPGPU的指令集还是比较接近load-store machine,总体来说与RISC更相似一些。GPGPU典型微架构可以简单表示为下图:

GPGPU指令执行流程示意图
这个图是微架构的模块示意图,而非流水线示意图。实际执行流程中Fetch、Decode、Execution这三步是必须的,而Memory access显然只针对memory指令,write-back则只针对需要写回的指令(比如memory load,带GPR输出的指令等)。
注:流水线的配置与ALU的latency有很大的关系。比如Volta前FFMA的延迟是6cycle,Volta及之后FFMA的延迟是4cycle,这绝对与流水线的改进有关。不过,这里的Latency并不是所有流水线的级数。因为Latency在程序中的表现形式是:一个指令发射后,其结果需要多少周期才能就绪(也就是能被其他指令使用)。两个back-to-back dependent的ALU指令(比如FFMA R0, R1, R2, R0; FFMA R0, R3, R4, R0;),前一个FFMA只要在第二个FFMA读取操作数之前把结果写回GRF,那后一个FFMA就可以得到正确值。对应到上面的5级流水线形式,就是前一个指令的WB要在后一个指令的ID前执行完就行(相当于4cycle延迟),最开始的IF那一级是不影响的。CPU对于这种形式的依赖还有更激进的旁路逻辑(forwarding),可以直接在前一个ALU的EX后把结果直接送给后一个ALU的EX当输入,从而减少流水线的bubble,提高性能。NV的GPU应该是没有这么紧凑的forwarding,但是NV的operand collector可以作为一个公共的操作数中转站,理论上前一个ALU的结果写回到operand collector就可以被下一个ALU看到了,不一定要回到GRF。
由于GPU运行模型的复杂性,在Decode后Execution前,还有大量其它的步骤:比如scoreboard的判断(主要用来保证每个指令的执行次序,防hazard),warp Scheduler的仲裁(多个eligible warp中选一个),dispatch unit和dispatch port的仲裁(发射或执行资源冲突时需要等待),还可能有读取作为立即数操作数的constant memory,读取predicate的值生成执行mask,等等。在执行过程中,也有很多中间步骤,比如输入GPR操作数的bank仲裁,跳转指令要根据跳转目标自动判断divergence并生成对应的mask,访存指令要根据地址分布做相应的请求广播、合并等等。在写回这一级的时候,由于一些指令的完成是异步的(比如一些内存指令),所以也可能需要GPR端口的仲裁,等等。
当然,步骤虽然多而琐碎,但未必都会新增单独的一级流水。GPU应该是为了简化设计和节约功耗,不愿意把流水线拉得太细长,因而很多操作都是塞在同一级流水线里,各种组合逻辑非常复杂。这样也导致它的主频往往就不能太高。比如最近几代NV GPU旗舰和次旗舰的主频:
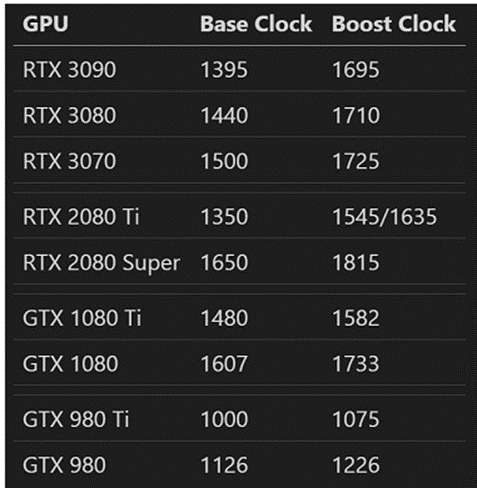
可以看到主频基本都在1~2 GHz之间,次旗舰的频率往往比旗舰要稍高一些(这里选的公版频率,但非公也大致是这个趋势),有些低端芯片频率可能还会更高一点。而如今(2021年)常见的桌面端x86 CPU,基准频率3~4 GHz,最大睿频4~5 GHz是很寻常的事。很多Arm CPU的大核,主频也能接近甚至超过3 GHz。当然,这么比也许不是特别公平。因为多数独立GPU的功耗很大,会极大的限制频率提升。一些众核CPU的频率也会比少核版的降一些,不过差别不会太大(类似上面GPU的旗舰与次旗舰的关系)。但即使算上这些,GPU的主频比常见CPU的主频还是显著低一些(实际上带核芯显卡的CPU里,GPU频率往往也是显著小于CPU频率)。这里面具体的因果关系也不是特别明白,感觉肯定还是有些故事的~
GPGPU指令执行吞吐的影响因素
指令执行吞吐一般指的是每个时钟周期内可以执行的指令数目,不同指令的吞吐会有所不同。通常GPU的指令吞吐用每个SM每周期可以执行多少指令来计量。对于多数算术逻辑指令而言,指令执行吞吐只与SM内的单元有关,整个GPU的吞吐就是每个SM的吞吐乘以SM的数目。而GPU的FMA指令(通常以F32计算)往往具有最高的指令吞吐,其他指令吞吐可能与FMA吞吐一样,或是只有一半、四分之一等等。所以很多英文文档会说FMA这种是full throughput,一半吞吐的是half rate,四分之一的是quarter rate等。当然,有些微架构下也会有1/3、1/6之类非2的幂次的比率。NV GPU近几代微架构的常见指令吞吐如下:
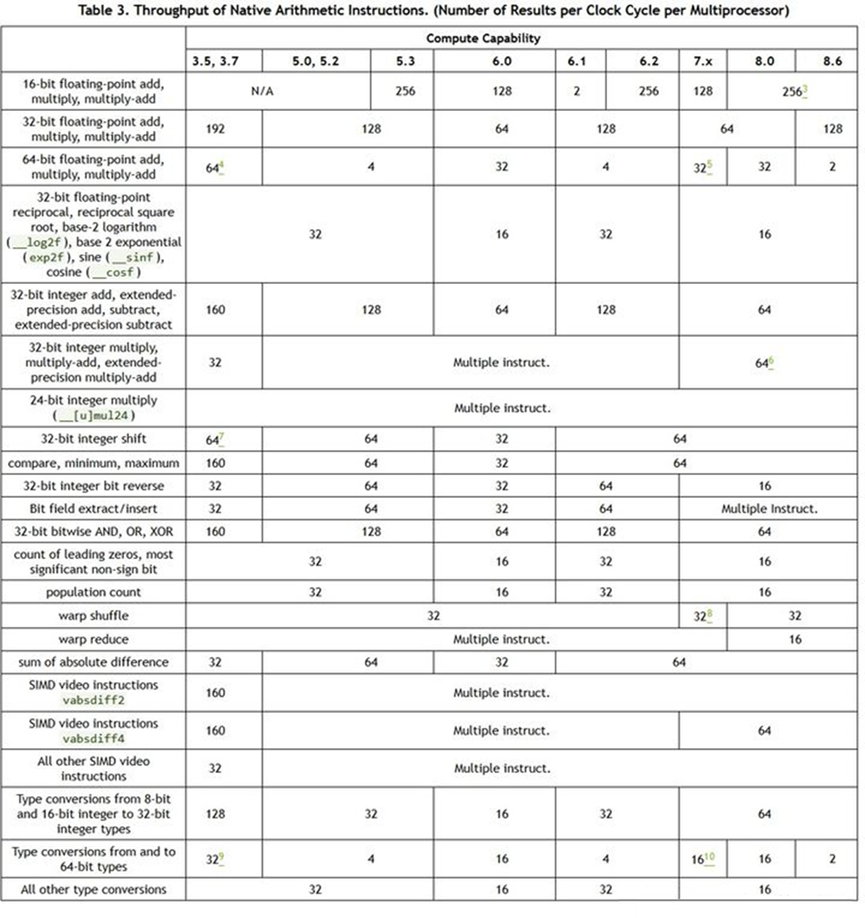
CUDA算术逻辑指令吞吐表
从图中可以发现,指令吞吐不仅与指令类型有关,还与微架构具体设计实现有关。主要会受到以下一些因素的影响:
- 功能单元的数目。绝大多数指令的功能都需要专用或共享的硬件资源去实现,设计上配置的功能单元多,指令执行的吞吐才可能大。显然,只有最常用的那些指令,才能得到最充分的硬件资源。而为了节约面积,很多指令的功能单元会相互共享,所以他们的吞吐往往也会趋于一致。比如浮点的FFMA、FMUL都要用到一个至少24bit的整数乘法器(32bit浮点数有23bit尾数,小数点前还有1bit)。以前一些处理器有24bit的整数乘法指令,两者乘法器就可以共用,从而具有相同的吞吐(不过NV最近几代好像都没有这个指令,ptx以及内置函数的24bit乘法应该是多个指令模拟的)。而FADD虽然用不上那个乘法器,但可以与FFMA共用那个很宽的加法器,以及一些通用的浮点操作(特殊数的处理,subnormal flush之类)。32bit的整数乘法因为需要更宽的乘法器,有的就不会做成full throughput,甚至可能被拆分成多个指令(比如Maxwell和Pascal用三个16bit乘法指令XMAD完成一次32bit整数乘法)。Turing的IMAD应该是有意识的加宽了,所以32bit的IMAD与FFMA吞吐一样,但印象中带64bit加数的IMAD应该还是一半。再比如一些超越函数指令(MUFU类,比如rcp,rsq,sin,exp之类),由于实际使用量相对不会太频繁,多数是1/4的throughput。
- 指令Dispatch Port和Dispatch Unit的吞吐。这个在之前的专栏文章也详细讲过。一个warp的指令要发射,首先要eligible,也就是不要因为各种原因stall,比如指令cache miss,constant immediate的miss,scoreboard未就位,主动设置了stall count等等。其次要被warp scheduler选中,由Dispatch Unit发送到相应的Dispatch Port上去。Kepler、Maxwell和Pascal是一个Warp Scheduler有两个Dispatch Unit,所以每cycle最多可以发射两个指令,也就是双发射。而Turing、Ampere每个Warp Scheduler只有一个Dispatch Unit,没有双发射,那每个周期就最多只能发一个指令。但是Kepler、Maxwell和Pascal都是一个Scheduler带32个单元(这里指full-throughput的单元),每周期都可以发新的warp。而Turing、Ampere是一个Scheduler带16个单元,每个指令要发两cycle,从而空出另一个cycle给别的指令用。最后要求Dispatch Port或其他资源不被占用,port被占的原因可能是前一个指令的执行吞吐小于发射吞吐,导致要Dispatch多次,比如Turing的两个FFMA至少要stall 2cycle,LDG之类的指令至少是4cycle。更详细的介绍大家可以参考之前的专栏文章。
- GPR读写吞吐。绝大部分的指令都要涉及GPR的读写,由于Register File每个bank每个cycle的吞吐是有限的(一般是32bit),如果一个指令读取的GPR过多或是GPR之间有bank conflict,都会导致指令吞吐受影响。GPR的吞吐设计是影响指令发射的重要原因之一,有的时候甚至占主导地位,功能单元的数目配置会根据它和指令集功能的设计来定。比如NV常用的配置是4个Bank,每个bank每个周期可以输出一个32bit的GPR。这样FFMA这种指令就是3输入1输出,在没有bank conflict的时候可以一个cycle读完。其他如DFMA、HFMA2指令也会根据实际的输入输出需求,进行功能单元的配置。
- 很多指令有replay的逻辑,这就意味着有的指令一次发射可能不够。这并不是之前提过的由于功能单元少,而连续占用多轮dispath port,而是指令处理的逻辑上有需要分批或是多次处理的部分。比如constant memory做立即数时的cache miss,memory load时的地址分散,shared memory的bank conflict,atomic的地址conflict,甚至是普通的cache miss或是TLB的miss之类。根据上面Greg的介绍,Maxwell之前,这些replay都是在warp scheduler里做的,maxwell开始将它们下放到了各级功能单元,从而节约最上层的发射吞吐。不过,只要有replay,相应dispath port的占用应该是必然的,这样同类指令的总发射和执行吞吐自然也就会受影响。
几个需要注意的点:
- 指令发射吞吐和执行吞吐有时会有所区别。有些指令有专门的Queue做相应的缓存,这样指令发射的吞吐会大于执行的吞吐。这类指令通常需要访问竞争性资源,比较典型的是各种访存指令。但也有一些ALU指令,比如之前提过的Turing的I2F只有1/4的吞吐,但是可以每cycle连发(也就是只stall 1cycle)。不过多数ALU指令的发射吞吐和执行吞吐是匹配的。
- 要注意区分指令吞吐与常说的FLOPS或是IOPS的区别。通常的FLOPS和IOPS是按乘法和加法操作次数计算,这样FMUL、FADD是一个FLOP,FFMA是两个FLOP。这也是通常计算峰值FLOPS时乘2的由来。但是有些指令,可以计算更多FLOP。比如
HFMA2 R0, R1, R2, R3;可以同时算两组F16的FMA,相当于每个GPR上下两个16bit分开独立计算(类似于CPU的SIMD指令),所以SM86以前的架构HFMA2的指令吞吐与FFMA是一样的,只是每条指令算4个F16的FLOP,而FFMA是2个F32的FLOP。这也就是TensorCore出现前F16的峰值通常是F32两倍的原因。DFMA由于输入宽度比FFMA再翻倍,所以功能单元做成一半就能把GPR吞吐用满(这里说的是满配Tesla卡,消费卡F64常有缩减)。因此,在TensorCore出现以前,通常的Tesla卡HFMA2、FFMA的指令吞吐一样,DFMA吞吐是一半,而看峰值FLOP就是H:F:D=4:2:1的关系。TensorCore出现后,指令(比如HMMA)本身的吞吐和指令入口的GPR输入量没有变化,但由于同一个warp的指令可以相互共享操作数数据,一个指令能算的FLOP更多了,因而峰值又提高了。当然,这里说的是一般情况,实际上根据产品市场定位的不同,有些功能可能会有所调整。 - SM86(Ampere的GTX 30系列)的F32比较另类。Turing把普通ALU和FFMA(包括FFMA、FMUL、FADD、IMAD等)的PIPE分开,从而一般ALU指令可以与FFMA从不同的Dispatch Port发射,客观上是增加了指令并行度。NVIDIA对CUDA Core的定义是F32核心的个数,所以Turing的一个SM是64个Core。Ampere则把一般ALU PIPE中再加了一组F32单元,相当于一个SM有了128个F32单元(CUDA Core),但是只有64个INT32单元。也就是说SM86的F32类指令的吞吐是128/SM/cycle,但其中有一半要与INT32的64/SM/cycle共享。或者说,Turing的F32和INT32可以同时达到峰值(包括A100),而SM86的INT32和F32不能同时达到峰值。
GPGPU指令执行的特点
与传统的x86 CPU相比,GPGPU在指令执行的逻辑上有很多独特的地方。
静态资源分配:GPU有一个很重要的设计逻辑是尽量减少硬件需要动态判断的部分。GPU的每个线程和block运行所需的资源尽量在编译期就确定好,在每个block运行开始前就分配完成(Block是GPU进行运行资源分配的单元,也是计算Occupancy的基础)。典型的运行资源有GPR和shared memory。GPU程序运行过程中,一般也不会申请和释放内存(当然,现在有device runtime可以在kernel内malloc和free,供Dynamic Parallelism用,但这个不影响当前kernel能用的资源)。CPU在运行过程中有很多所需的资源是动态调度的。比如,x86由于继承了祖上编码的限制,ISA的GPR数目往往比物理GPR少,导致常常出现资源冲突造成假依赖。实际运行过程中,通常会有register renaming将这些ISA GPR映射到不同的物理GPR,从而减少依赖(有兴趣的同学可以研究下tomasulo算法)。GPU没有这种动态映射逻辑,每个线程的GPR将一一映射到物理GPR。由于每个线程能用的GPR通常较多,加上编译器的指令调度优化,这种假依赖对性能的影响通常可以降到很低的程度。
每个block在运行前还会分配相应的shared memory,这也是静态的。这里需要明确的是,每个block的shared memory包括两部分,写kernel时固定长度的静态shared memory,以及启动kernel时才指定大小的动态shared memory。虽然这里也分动静态,但指的是编译期是否确定大小,在运行时总大小在kernel启动时已经确定了,kernel运行过程中是不能改变的。
其实block还有一些静态资源,比如用来做block同步的barrier,每个block最多可以有16个。暂时没测试到barrier的数目对Occupancy的影响,也许每个block都可以用16个。另一种是Turing后才出现的warp内的标量寄存器Uniform Register,每个warp 63个+恒零的URZ。因为每个warp都可以分配到足额,应该对Occupancy也没有影响。另外每个线程有7个predicate,每个warp有7个Uniform predicate,这些也是足额,也不影响Occupancy。
GPU里还有一种半静态的stack资源,通常也可以认为是thread private memory或者叫local memory。多数情况下每个线程会用多少local memory也是确定的。不过,如果出现一些把local memory当stack使用的复杂递归操作,可能造成local memory的大小在编译期未知。这种情况编译器会报warning,但是也能运行。不过local memory有最大尺寸限制,当前是每个线程最多512KB。
顺序执行:乱序执行是CPU提高CPI的一个重要途径,但乱序执行无论是设计复杂度还是运行控制的开销都很大。CPU的乱序执行可以把一些不相关的任务提前(相关的也可以乱序,但要求顺序提交),从而提高指令并行度,降低延迟。而GPU主要通过Warp切换的逻辑保持功能单元的吞吐处于高效利用状态,这样总体性能对单个warp内是否stall就不太敏感。
虽然GPU一般是顺序执行,但指令之间不相互依赖的时候,可以连续发射而不用等待前一条指令完成。在理想的情况下,一个warp就可以把指令吞吐用满。当然,实际程序还是会不可避免出现stall(比如branch),这时就需要靠TLP来隐藏这部分延迟。
显式解决依赖:既然是顺序执行,但同时又可以连续发射,那怎么保证不出现数据冒险呢?NV GPU现在主要有两类方式:第一种是固定latency的指令,通过调节control codes中的stall count,或者插入其他无关指令,保证下一条相关指令发射前其输入已经就位;第二种是不固定latency的指令,就需要通过显式的设置和等待scoreboard来保证结果已经可用。在x86的CPU中,memory结果的可见性是通过缓存的一致性来控制的,这样read-after-write之类的组合可以通过cache的可见性来保证,但多线程的情况也需要通过coherence和memory consistency model来保证。GPU本身运行就是多线程的,同一个warp内也是通过scoreboard来保证次序。但多个warp之间,GPU也需要维护相应的coherence和memory consistency model,具体大家可以参考PTX文档: Memory Consistency Model。
当然这个逻辑虽然是这么设计的,估计偶尔也会有出bug的时候。Maxwell和之前的架构偶尔能看见编译器往程序内插一些NOP。大概就是硬件上有问题,靠编译器来强行修补。Turing上似乎已经比较少见了。
指令设计中的一些原则与思路
指令长度的问题
至少从Kepler开始,SASS就是定长的了。Kepler每条指令64bit,每8条指令含一条control code,之后的Maxwell、Pascal每条指令还是64bit,但是control code变成了每4条指令一条。Volta、Turing、Ampere都是每条指令128bit,每条都自带control code。
定长和变长有什么差别呢?一般讲体系结构的书上会用RISC与CISC来做对比,因为一般CISC指令集是变长的,比如x86。而RISC则通常是定长的。定长的好处之一是解码器可以提前解码,且一般解码开销小。因为首先指令等长,每个指令的范围是确定的,指令定界不依赖于前一个指令的解码。其次RISC在编码的时候一般各个域的位置和长度比较整齐,解码相对说来自然也更简单一些。而变长则只能顺序解码,不得到前一条指令长度,后一条指令就不知道从哪里开始,当然就无法解码。同时由于长度是变化的,每个操作数的类型和内容都可能会变化,解码也就更繁琐一些。不过变长有一个好处就是可以压缩一些常用指令的长度,从而减少程序大小。而定长就没有这种方式。
不过,现在很多架构和指令集设计都渐渐趋同。比如x86虽然变长(从一个Byte到十几个Byte),但它解码前会先定界,然后可以经过预解码变成一系列的Micro Operation,这样真正执行的时候也类似RISC。而RISC也不都是定长的,比如ARM的Thumb模式可以混用16bit和32bit的指令,RISC-V也可以加长指令实现特定的功能扩展。
对于GPU来讲,觉得长指令还是有很大的好处的。理由如下:
- 指令Cache是GPU中命中率最高的Cache之一(constant cache也许是真的No.1)。一个warp 32线程已经让指令解码和调度之类的开销大大均摊了。而同时大部分代码都会被成千上万个warp运行,这个开销还可以被平摊得更小。当然,每个指令变长会加重指令Cache的容量和吞吐负担,但它的格式也可以做得更整齐更有规律,从而大大简化解码过程。像x86这种编码复杂的指令集,连解码都会添加相应的cache(Micro-Op Cache)。而只要指令够长够整齐,解码就可以做得够简单。这高ICache命中率的GPU来说,总体来讲还是赚的。或者可以认为,x86的Micro-op cache主要利好循环这种高重用代码,而GPU每条代码都与循环类似,那不如直接就用解码后的指令做输入。
- 前面提过指令执行的颗粒度。由于GPU流水线和发射逻辑的限制,每条指令都有基础开销(至少占用一次Dispatch Unit和相应Port),那在同一条指令中塞进更多信息,就成为减少指令基础开销的重要手段。指令越长,能编码的信息就越多,比如指令内嵌的立即数就可以支持更长。典型的如ALU的立即数操作数,load/store的offset,branch的跳转目标等。同时,多数指令也可以支持更复杂的modifier,从而表述能力和可编程性都更强。同时,更整齐规范的格式也更有利于编译器做优化,性能的可及性更好。
- 指令够长,就可以加入更多的调度和控制信息,从而简化硬件自主判断,拓宽指令观察视野。Control code就是一个典型的例子。大部分的Control code其实是编译期信息,没有control code,其中很多依赖的判断就需要专门的硬件逻辑去检测和处理。而受限于硬件实现的复杂度,其视野肯定不如编译时的全局视野宽。因此,通过这些控制信息,可以更好的利用编译器在编译时获得的先验知识,减少硬件自主分析和处理,从而简化硬件设计,提高面积利用率的同时也简化设计和验证过程。
Volta开始的128bit指令,觉得还是一个很有意义的尝试。也许有人觉得这个也许可以做点内存压缩,不过感觉意义不是太大,压缩和解压其实也算是编码解码过程,寻址还会增加负担,未必便宜。
指令集设计与ILP的一些相关性
GPU两个最重要的并行逻辑,ILP(Instruction Level Parallelism)和TLP(Thread Level Parallelism,TLP有时在CPU语境下也代指Task Level Parallelism,两者还是有所区别),两者在隐藏延迟中都有重要作用。ILP的逻辑主要是靠前一条指令不需要执行完成就能发射下一条无关指令,而TLP则是通过warp之间切换来隐藏延迟。从另一个角度讲,ILP和TLP都可以增加可发射指令的数目,尽量减少功能单元的闲置,从而提高硬件利用效率。
ILP是线程内(更准确的说是Warp内)的并行逻辑,影响ILP的主要因素有两种,一是指令之间的依赖性,二是指令的资源竞争或冲突。依赖分显式和隐式。显式依赖主要是数据的相关性,隐式依赖则与资源竞争很相似,主要是两个指令都要使用某个特定含义的公共资源。典型的显式依赖如:
FFMA R3, R1, R2, R0; // sm_75: stall 4 cyclesFFMA R6, R4, R5, R3;而隐式的依赖比如这种:
// sm_611: IADD RZ.CC, R0, R1 ; // set condition code as carry2: IADD.X R2, RZ, R2 ; // use condition code as carry3: IADD RZ.CC, R3, R4 ;4: IADD.X R5, RZ, R5 ;IADD可以把进位存到专门的CC寄存器(类似x86的carry flag),然后IADD.X可以把这个CC寄存器当成carry读进来再做加和。由于CC寄存器只有一个,虽然2和3两条指令没有数据依赖,仍然不能把2和3互换以隐藏1-2和3-4之间的延迟。而在Turing里这种指令已经可以显式的用Predicate来存储carry,如:
// sm_751: IADD3 R4, P0, R0, R2, RZ ; // set P0 to carry out2: IADD3 R10, P1, R6, R8, RZ ; // set P1 to carry out3: IADD3.X R5, R1, R3, RZ, P0, !PT ; // use P0 as carry in4: IADD3.X R11, R7, R9, RZ, P1, !PT ; // use P1 as carry in这样1、3和2、4两组指令就可以interleave,正确性互不影响,从而相互隐藏延迟,提高ILP。
这种相对更独立的指令集设计其实有点类似函数式编程:操作专门carry寄存器可以看做是stateful的操作,改成可编程的Predicate后就成为只与输入输出有关的stateless操作,不改变机器状态。也可以认为是所有需要用carry寄存器做输入输出的指令,都需要被序列化。通过与当前机器状态解耦,获得更大的指令调度自由度,编译器的后端优化也会更加方便。
NV GPU在很早就开始有意识的淘汰这种含隐式输入输出的指令。比如早期使用隐式栈的call、ret、break等等(当然其实这和ILP关系已经不太大了)。例如SM61中要return时需要先显式的用PRET设置某个隐式的调用栈,然后直接用RET返回。显然在RET时这个栈必须是对应当初PRET设置的值(中间能不能再进出栈没仔细研究),否则就会出错。而Turing直接使用带GPR地址的指令进行操作,就消除了这种隐式栈的操作过程,减少了指令之间复杂依赖对编译器的干扰。
// RET in sm_61PRET 0x258 ;...RET; // RET.REL in sm_75MOV R20, 32@lo((_Z7argtestPiS_S_ + .L_9@srel)) ; // relocation with addendMOV R21, 32@hi((_Z7argtestPiS_S_ + .L_9@srel)) ;...RET.REL.NODEC R20 `(_Z7argtestPiS_S_); // RET.ABS in sm_75RET.ABS R32 `(_Z7argtestPiS_S_);再稍微扩展一点。x86中有control register来控制如何做浮点数的rounding,是否做subnormal的flush(x87 FPU control register控制普通的FPU指令,MXCSR控制SSE指令)。但在SASS中,FFMA、FMUL、DFMA等浮点运算指令,每个指令都可以自主控制是否打开flush(使用FTZ modifier),如何做rounding(RM, RP, RZ, RN)。这就意味着每个指令可以自主决定当前指令的运行方式,而不用改变机器状态。不同模式混用时,就不需要保存和恢复control register了。
那再再扩展一点,x86其实也有控制FP exception的寄存器,NV GPU里是怎么操作的呢?好像没看见,感觉是被去掉了。这还是一个挺值得思考的问题~
当然,也不是说所有的隐式都应该变成显式。比如每个Warp都有一个隐式的active mask,用来标记当前warp中divergence的情况。active mask与指令predicate的“AND”会共同决定当前指令是否起作用。那把mask交由指令显式操作有意义吗?觉得没有,因为这没有太多额外的可编程价值。首先divergence造成的mask变化只能被分支或分支同步指令修改,其他指令需要控制效果直接用predicate就可以了,没必要操作mask。其次,这个操作本身是非常固化的,增加相关操作指令并不会带来新功能,反而会增加指令负担(相当于每次可能有divergence的分支时,都要显式的保存和设置mask,遍历不同divergence的分支时就更麻烦了)。因此,在有predicate的情况下,active mask还是做成隐式的比较合理。当然,volta后的Independent Thread Scheduling也要自主控制和依赖内部的mask状态,就更没法做成显式的了。不过,虽然mask是隐式的,但divergence后重新converge一般是显式的(通过BSSY和BSYNC指令),否则程序就不知道应该在哪个点join了。
复合操作与附加操作
前面也提到了每个指令都有基础开销,那尽量在一个指令里塞进更多事情以分摊基础开销,就成为指令改进的一个重要方向。毕竟每个指令都要占用发射机会,但提高频率很困难,也就是发射的总指令数有限,那就只好让每个指令多做事。
比如一般的ALU指令可能有1~3个输入操作数,为了尽量利用GPR的读吞吐和增加每个指令的操作能力,SASS里其实有单指令多操作的情况。最常见的就是FMA(包括FFMA、DFMA、HFMA2和IMAD等),它可以一条指令同时计算乘和加两个操作:d=a*b+c。Tensor Core的MMA类的指令也通常是3个输入操作数。这里以Turing为例,常见的多输入或多操作指令有:
FFMA R5, R4, R5, R11 ;DFMA R4, R2, R4, R2 ;HFMA2 R3, R13, R9, R3 ;IMAD.WIDE R10, R9, R4, R10 ;IADD3 R36, -R11, R22, -R34 ;LOP3.LUT R9, R15, R9, R16, 0xfe, !PT ; LEA.HI.X R7, R3, R51, R2, 0x3, P0 ; // Load Effective Address: d = (a<<b) +cSHF.R.U64 R3, R11, R0, R12 ; // Funnel shiftPRMT R61, R60, R58, R61 ; // Byte permute I2IP.S8.S32.SAT R0, R1, R0, R2 ; // Integer To Integer Conversion and PackingIDP.4A.S8.S8 R9, R20, R25, R9 ; // Integer Dot Product and AccumulateIMMA.8816.S8.S8 R36, R50.ROW, R74.COL, R36 ; // Integer Matrix Multiply and AccumulateHMMA.1688.F32 R0, R184, R200, R0 ; // Half Matrix Multiply and Accumulate这个列表并不完整,比如ISCADD虽然在Turing指令集里,但是编译器似乎更倾向于用LEA和IMAD,所以好像很少见到了。还有warp shuffle指令SHFL,也可以接受4个GPR做操作数,不过这不是通常意义上的ALU指令,其实更接近memory指令一些,所以也没列出来。然后是大部分非tensor类的整数和位操作指令都有Uniform datapath的对应版,这里也没列。
这些多操作指令往往都需要更多的操作数。上一期讲吞吐的时候也提到了,GPR的吞吐用不满也就浪费了,所以一般ALU最多是3个输入GPR。其实每cycle最多能读4个,不过多少还是要留点余量给其他异步指令(如内存读写指令),否则抢占GPR的端口和抢占发射机会是一个效果。立即数和Predicate因为不占用GPR的吞吐,所以还可以额外加。比如LOP3.LUT R9, R15, R9, R16, 0xfe, !PT ;就是3个GPR+1立即数+1Predicate的输入。于是,NV在设计指令集的时候又经常会在一些ALU操作后加一个免费的Predicate操作。比如*SETP类的指令本来就是通过比较生成一个predicate,但它也可以顺手把生成的predicate与另一个predicate做与、或、异或等,这样就可以把一些链式的bool操作(比如 a < M && b < N && c < K)附带在比较中。包括前面说的LOP3,以及PLOP3等,都具有这种额外的predicate输入。
FSETP.NEU.AND P0, PT, RZ, c[0x0][0x16c], PT ;ISETP.LT.OR P0, PT, R9, R8, P0 ;ISETP.EQ.XOR P4, PT, R7, R1, P4 ;还有另外一类额外的附加操作,比如float intrinsic里有一个函数叫__saturatef(float x),它会把输入clamp到[0,1]这个区间里。但是它并不占用一个指令,因为float指令自带一个modifier叫.SAT,如FFMA.SAT R6, R2, R7, R0 ; 会自动对结果R6做saturate,并没有额外开销。类似的这种饱和操作在一些整数操作中也会出现(比如I2I.S16.S32.SAT R11, R11 ;表示把S32的输入saturate到S16的范围)。
复合操作和附加操作可以大大增强指令的表述能力,用更少的指令做更多的事情。但也要看到,它增加了指令的复杂度,对编译器后端优化也提出了更多的要求。同时,在硬件设计上它也会有一些额外的开销。如果这些操作不是特别常用,对指令运行开销反而是负担,所以多数还是需要一些功耗控制措施。比如IADD3其实多数时候都有一个是RZ,LOP3也通常只有两个有效输入。至于*SETP后带Predicate的情况,其实占比也不高。所以这些在具体设计和实施上,应该还是需要做相应的优化的。
立即数操作数和Constant Memory操作数
由于Volta前的SASS指令只有64bit,一般ALU的立即数操作数中只有19bit的编码。这对于一些特定的指令是不太够的,所以早期也有特定的32bit立即数的指令,如FADD32I,FMUL32I,MOV32I等等。不过这些指令最多只有2个输入操作数,FFMA这种就没法弄了。而计算很多函数值(比如sin)一般都是从高次多项式近似开始,需要计算大量给定系数的FMA,这些要用立即数就只能用mov先把32bit立即数写入GPR,然后再FFMA。Volta后每个ALU包括FFMA都能用满32bit立即数,就没有这个问题了。
当然,实际Volta前的多项式逼近不是用立即数实现的,而是用Constant Memory。因为Constant Memory需要的编码更少(几bit的bank编码+16bit的地址编码),而且Constant memory还可以用在64bit的DFMA上,通用性更强。这也是constant memory对指令表达能力的一个重要贡献。
Constant memory与立即数在做操作数时还有不少区别: 1. Constant memory运行有overhead,启动kernel前需要初始化。而立即数是hardcode在编码里,没有额外overhead。 2. 立即数是编译期常数,编译时就必须知道值。Constant memory可以做运行期常数,也就是启动kernel前才需要得到具体值,在运行前是可调的。 3. Constant memory有容量限制,当前应该是每个bank 64KB。立即数的总容量则是程序能写多长就可以多大。 4. Constant memory运行期开销会大一些,因为它毕竟是内存,需要相应的cache和load单元支持。 5. 立即数的编码能力比较有限,当前128bit的指令也就32bit立即数。而Constant memory只要在指令格式中约定好,32bit和64bit都可以,将来扩展到128bit甚至更多也不是不行。
当前在CUDA程序里,编译期常数是放在Constant memory还是做立即数是编译器决定的。一般来讲,32bit能精确表示的是立即数(比如float的所有数,double的1.0,2.5之类),需要64bit才能精确表示的会用constant memory。
注:传运行期常数,直接用kernel的参数不也可以吗?有什么区别呢?
其实很相似,但确实也有区别。因为kernel并没有什么来自host的调用栈,kernel的参数其实也是用constant memory存储的,在kernel启动前会由驱动自动初始化。所以两者从性质上很相似,但又有点差别。kernel参数的scope是当前kernel,每次启动kernel理论上都要重新初始化参数区的constant memory,这其实也是kernel启动的overhead之一(不太确定cuda Graph会不会做优化)。而用户自己设置和copy的constant memory,scope至少是module(可以简单认为是一个cu文件,或者更具体一点是cubin文件)。这就意味着同一个module的kernel都可见。所以如果同一个module内的kernel共用大量参数,且中间不会更改,那就只需要初始化一次(重复启动同一个kernel也是同理)。
这甚至可以是一个极致优化的例子。把所有kernel的输入参数都放在某个struct里,然后把struct复制到constant memory,就可以不用参数启动这所有的kernel了。这应该会节省一点overhead(如果cuda graph不能做优化)。
PS:其实这个操作的意义主要在于接口的可扩展性。需要增加新参数的时候,只需要在struct里新加一个成员变量就行,不用去改函数参数和调用kernel的地方了。相信,这个有时候真是很方便!当然也可以在kernel参数里传一个struct指针,这样代码量也相当。但是需要自己把struct内容memcpy到device上,读参数时还会增加内存负担。因为constant在SM内有专门的cache,load时又有broadcast机制,hit时几乎没有额外开销。
格式的通用性与信息具体化
很多指令可以支持大量的modifier,把一些输入信息更加具体化。这里举一个典型的Turing IMAD的例子:
IMAD R4, R5, R0, -R4 ;IMAD.HI.U32 R49, R5, c[0x0][0x1d8], RZ ;IMAD.WIDE.U32 R20, R17, c[0x0][0x168], R20 ; IMAD.MOV.U32 R31, RZ, RZ, c[0x0][0xc] ;IMAD.SHL.U32 R0, R2, 0x8, RZ ;IMAD.IADD R2, R7, 0x1, R11 ;前3个其实都没啥特别。IMAD本身是算整数的d=a*b+c,类似浮点的FMA(前面也提到了,实际上Turing的IMAD和FFMA共用了功能单元)。单独的IMAD就是三个32bit的计算,保留低32bit。IMAD.HI就是保留高32bit,IMAD.WIDE表示加数c是64bit(a、b还是32bit),输出d也是64bit。这都算是常规操作。
后三个就有点意思了,IMAD.MOV其实就相当于MOV,因为它的输入a、b肯定都是RZ(SASS中的恒零寄存器),所以输出d肯定等于c。用IMAD做MOV主要是MOV指令和普通INT32是一个Dispatch Port,而IMAD是FMA的port,两者错开有利于提高ILP。但直接写IMAD.U32 R0, RZ, RZ, R1; 与 IMAD.MOV.U32 R0, RZ, RZ, R1; 有什么区别呢?功能上两者应该是一样的,但功耗上可能不太一样。因为IMAD会用到一个很长的乘法器,功耗会很大。但如果事先知道这个乘法器不用了,那硬件上就可以绕过或是用一些处理不触发它,从而节省功耗。后面两个指令也是类似,IMAD.SHL相当于b一定是2的幂次,IMAD.IADD相当于b一定是1,其实也是不需要完整的乘法器功能。不写SHL或IADD不影响结果,但显式的告诉功能单元,可以让功能单元得到更明确具体的信息,从而进行一些优化。
那能不能让硬件自己检测呢?当然可以,但是未必划算。首先,如果大多数IMAD指令都是不带特殊性的操作数,那为了检测这种case的功耗优化方案就会给硬件造成额外负担。就像cache一样,hit的时候自然是好,但加了cache往往也会劣化miss时的开销。如果miss比率太高的话,加cache就是个负优化。同样,在这里如果大部分情况执行路径可以被优化,那自然可以省功耗。但如果多数情况其实优化不了,那就白白损失了优化检测的这部分硬件开销,变成了负优化。当然,增加这个modifier本身也是要看使用频率的,如果极少用到,那其实也是降低了面积效率。这都需要对使用场景和规划做准确的判断。
这个逻辑其实也和control code有些相通之处,尽量把编译期的信息融入到程序中,让程序尽量明确运行逻辑。这其实也许体现了NV硬件设计中一个更上层的指导思想:软件尽量具体地告诉硬件运行方式,而硬件则尽量减少自身的判断和复杂监测逻辑,无脑的运行软件的指示即可。这样硬件设计尽量简化,不但能节约面积开销,测试、验证复杂度都能降低。当然,这不是一件简单的事情,想有效的安排和传递各种编译信息,肯定需要软硬件协同设计。这对软硬件的架构规划和协作,包括对应用、编译器、指令集、硬件架构等统筹规划,还是提出了很高的要求,很体现功力。
这里IMAD做这些优化应该是和编译器有确定配合的,编译器在合适的时候会优先选择这些模式。其实这些功能也可以有其他一些实现方式,但是多则惑,也没有必要。开销大致等价的实现中选一个就可以了。
一些具体的指令
指令集内容实在太多了,有很多东西没有靠谱的输入,瞎猜也意思不大。就简单列一些SASS中觉得还比较有意思的点,供大家参考。这里基本都是Turing的指令。
FMA,MUL, ADD 系列
FFMA是衡量GPU算力的标杆之一。从指令吞吐角度讲,FFMA一般都是最高的那一组。FFMA功能上相当于FMUL+FADD(FFMA精度更好,因为只做了一次舍入),那FMUL与FADD与FFMA共用单元就很合理。不过另一个有意思的地方是,FADD的reuse cache用的slot是1、3,是不是暗示它其实是FFMA的套壳,只是把FFMA第二个操作数固定成1?当然,更省的办法应该是有直接的短路逻辑。
DFMA, DMUL, DADD系列具有不定长的延迟,需要靠scoreboard去控制依赖。觉得一是因为FP64相关单元配置变化很大,有的还是多个SMSP之间share,可能存在竞争,这样延迟不可控。二是它的吞吐可能很小(有的卡是1/16),指令延迟可能会超过stall count能有效表示的范围,所以还是用scoreboard比较靠谱。
这些都支持32bit立即数做操作数。D系列虽然每个操作数是64bit,但如果后32bit都是0,那也可以放进32bit立即数里,用的时候做padding就可以了(指数位还是按FP64来,只是截了尾数后32bit)。HFMA2、HMUL2、HADD2则相当于把它当成两个16bit的立即数。
IMAD, LEA, IADD3
IMAD在前面已经介绍过一些了。这里可以稍微再补充一些相关的。
IMAD.MOV.U32 R31, RZ, RZ, c[0x0][0xc] ;IMAD.SHL.U32 R0, R2, 0x8, RZ ;IMAD.IADD R2, R7, 0x1, R11 ; IMAD R5, R5, c[0x0][0xc], RZ ;IMAD.X R21, RZ, RZ, R7, P0 ;前三个已经介绍过,为了控制乘法器的开销,有相应的modifier去明确输入。但是可以发现,加数为RZ时没看到专门的modifier。IADD3其实多数情况下也只有两个操作数,第三个是RZ的概率很大。也没有看到有modifier去优化这个,也许单纯检测RZ开销不大,当然也可能是加法器的开销没那么大,不是很敏感。
另外就是IMAD在接受carry输入时,有的前两个输入也都是RZ,但是这次就没见到相应的modifier。不知道是没设置还是没有,可能是加了carry这个逻辑不适用,也可能是编译器没考虑?也不是很清楚。亦或是这种概率很小,可以忽略?
与IMAD的一些功能有共通之处的还有LEA指令。这是计算地址时常用的指令。IMAD是d=a*b+c,LEA则特殊一点是d=(a<<b)+c。这样算X[i]这种地址时,相当于i*sizeof(type) + *X。如果size是2的幂次,那就可以用LEA。LEA与INT32是一组,IMAD是FMA那组,两个也可以配合使用。
LOP3
LOP3还是一个挺有意思的指令,它可以完成三个32bit数的任意按位逻辑运算。其实逻辑也很简单,把这个映射关系看成一个函数d=F(a, b, c),abcd都是bool值。输入状态有2^3=8种可能,那每个F函数都可以用这8个输入时的输出来完全表示。用8bit的编码(立即数查找表,immeLUT)就可以指定这样一个逻辑函数。更具体的用法和介绍大家可以参考PTX文档。

LOP3 ImmeLUT
粗看起来好像挺厉害的,其实多数时候也没有什么大用。曾经搜过官方库里的所有LOP3指令,看到的情况是:绝大部分情况下第三个操作数是RZ,也就是说3输入的按位逻辑函数其实还是挺少见的。如果真的要找场景,可能密码学或者挖矿之类会有些不错的应用。
不过细品一下,其实还是有一些妙用的。比如有两个32bit数a,b,需要把a的某些bit和b的bit拼在一起(对位替换),怎么弄呢?这其实就是一个简单的按位逻辑函数c[i] ? a[i] : b[i]。这样lop3就能用上。那什么时候会用到这种功能呢?其实还是有一些。比如copysign,需要把a的符号位替换掉b的符号位。再比如浮点数里有些指数、尾数之类的操作,也是有一些用处的。
更具体一点的例子,比如y= (x>=0) ? 1 : -1,这相当于就是把x的符号位复制给整数1。不过…… 这个一条LOP3指令做不到,因为这里c已经用了立即数(0x70000000,也就是选中第一个符号位bit),a或b就不能再用立即数了,等于说这里需要先把1或0x70000000移到GPR里,才能用LOP3来操作。
MUFU
MUFU是SASS中计算各种超越函数的指令。数学上,超越函数是相对代数函数(有限次加、减、乘、除、开方等组合)而言。但硬件上不能用多项式表述的好像都归在超越函数里了。多项式求值一般就是乘和加,不需要其他的指令。而超越函数,就需要通过一些其他指令或是软件逼近来实现。有的地方也叫特殊函数,感觉是不太合理,就这些初等函数怎么也谈不上很特殊吧……
常见的MUFU类的指令有:
MUFU.RSQ R5, R10 ;MUFU.RCP R3, R14 ;MUFU.EX2 R9, R8 ;MUFU.LG2 R10, R9 ;MUFU.COS R9, R19 ;MUFU.SIN R10, R19 ; MUFU.RCP64H R3, R7 ;MUFU.RSQ64H R11, R29 ;其实数学函数求值这个事情还是有很多可聊的点。
首先,这些指令都是给出近似值。对精度要求高的话还是需要调用相应的数学函数库再做软件实现。一般说来,有的数学函数可以迭代更新(比如求倒数reciprocal,RCP),那就可以从近似值开始用不动点迭代得到更精确的值。另一种是可以做argument的range reduction,把全范围的参数缩放到能比较精确计算的范围内。比如对于x具有二进制形式x=a*2^e, log2(x) = log2(a*2^e)=e + log2(a)。那只需要精确计算log2(a)(其中a在1~2之间)就可以得到精度很高的解,而MUFU.LG2在某些特定范围内是可以满足精度要求的。还有一种就是sin和cos这种,它没有迭代形式,也没有特别好的手段做规约,那就先规约到一个不太大的范围(比如正负pi/4),然后用一个高次多项式去近似(不是泰勒展开,大家有兴趣可以去研究一下Remez的minimax方法)。所以MUFU.SIN只是在近似计算中出现,精确计算中可能用不着它。
当然,软件实现上还是有很多自由度,这里只是给出了一种选择方式。NV的数学函数库不直接开源,但是有相应的LLVM的bitcode(NVVM目录下的libdevice.*.bc),可读性还比较强,可以参考。
从这些实现可以看到,大量辅助计算仍然是用加、乘这种初级运算完成的,所以即使是使用了大量数学函数,主要的计算量也在FMA、MUL和ADD这种简单指令。MUFU还是占比比较小。如果使用了内置函数,则相对占比高一些,但多数时候还是需要相应的简单指令的配合。而且有些常用函数其实并没有加速实现(比如sqrt,即使是intrinsic的__fsqrt_rn这种实现也非常复杂)。这里面肯定是有所考虑的。
MUFU的64bit版本(RCP64H和RSQ64H)其实只用了一个GPR输入,估计觉得反正是近似,多后面32bit意义也不大。
FSETP
FSETP本身也没有什么特殊的,就是根据一些浮点的比较操作设置一个bool变量。比如:
FSETP.GT.AND P1, PT, R1, R2, PT ;FSETP.GEU.AND P1, PT, R1, RZ, PT ;第一个是比较R1是否大于(greater than,GT)R2,然后顺带把结果与另一predicate做了与(AND)。GE是greater or equal,那GEU是什么呢?这其实是浮点比较中的一个特例。PTX把这个叫unordered floating-point comparisons,专门为了NAN的特殊形式。
如果熟悉IEEE 754,就知道NAN如果出现在比较浮点运算(a op b)中,那结果永远是false,甚至x为nan时x==x都是false(甚至能用这个来判断x是不是nan……)。所以PTX或SASS中有两类浮点比较,一类是ordered,有nan就为false,一类是unordered,变成只要有nan就为true。如果两个输入都不是nan,那两者就一样。
这个逻辑有什么用呢?一些编译器在处理比较运算的时候,会选择一个canonical的形式(比如把a >= b统一改成 b<a,这样就不用处理>=这种操作了),而对浮点操作这个变化是不正确的,就是因为有nan的存在。但是ordered a>=b 与 unordered b<a 两者是等价的。
浮点的比较操作里还是有不少坑,和整数的比较还是差别很大。除了nan的不等于自己,还有一个就是+0和-0的二进制表示不一样,但却是相等的。denormal的情况没有仔细研究,要是会被flush的话,这里面也有很多需要注意的问题。
LDG/STG, LDS/STS, LDL/STL
内存相关指令一般都比较复杂,特别是global操作,modifier特别多。这部分其实已经超出指令集设计本身的范畴,更多的是consistency model的问题。这只讨论指令输入输出中的一些点。
比如说LDG的有两个使用UR做base的形式:
LDG.E.SYS R16, [R10.64+UR10+0x200] ;LDG.E.CONSTANT.SYS R54, [R32.U32+UR4] ;第一条中R10.64应该表示它是个64bit的值,如果是32bit会用第二行的R32.U32这种形式。而后面的UR4,一般都是64bit。用32bit的好处就是一些简单的地址运算可以用32bit的运算得到,比每次都做64bit操作要更划算。而如果是warp内uniform的base变化,可以直接改UR,UDP的计算与一般的ALU也是独立的。这也算是一种减少计算强度的方式。
LDG/STG也有一些控制cache的逻辑,比如带CONSTANT的modifier表示会在read-only L1中缓存。当然,这个具体操作其实每代架构都会有所不同,但能用constant的话没理由不用。
Shared Memory里有一个有意思的内置left shift。比如下面的X4, X8, X16:
STS [R2.X4+0x400], R3 ;STS.64 [R26.X8+UR4+0x10], R28 ;LDS.U.128 R20, [R57.X16+UR4] ;Shared memory因为地址窗口小,一般32bit地址足够了。而且起始地址永远是0,基址也常常是编译期常数(静态分配)。所以地址计算往往可以表示为immeBase + index * size。而元素大小常常是2的幂次,这样就可以省去预先计算乘法或是移位,直接让地址单元进行处理。这也算是减少计算强度的方法。
不过其实LDG/STG/LDL/STL应该也可以用这个逻辑,特别是local memory,不知道为什么没有。
BAR
BAR指令就是barrier,更确切的说是synchronize barrier,就是通常block内用来同步的__syncthreads()函数。CUDA中叫barrier的术语挺多的,比如dependency barrier主要指DEPBAR指令,是用来等scoreboard的。memory barrier应该是相当于memory fence,但是现在好像有专门的API操作。还有一种convergence barrier就比较底层了,是用来处理warp divergence的。
CUDA C一般只用一个barrier(就是BAR.SYNC 0x0后面的那个0x0),但实际上PTX或SASS里每个block最多可以用16个barrier,每次同步可以选择同步到某个barrier。这样同一个block的线程可以分块同步到不同的barrier上去(BAR有warp计数的参数)。另外,BAR还支持arrive、sync模式,可以搭配出类似生产者-消费者的模型,具体可以参考PTX文档。这个功能没有C API,但是可以用inline PTX其实风险也不大。这其实也算是一个降低瓶颈资源压力提高并行度的方法,与前面提到的用predicate做carry,还有跳转用显式GPR代替隐式栈,应该算是一类思路。
CUDA 11之后有一个新功能叫Asynchronous Barrier。从实现上更偏软件,但功能上没看出它比BAR.arrive与BAR.sync的组合有什么更特别的地方。也许是scope更灵活?或是更适合CPU软件移植和编译器实现?
BAR不仅可以实现同步,还可以顺带计数或是做reduction,这个是可以从CUDA C调用的(参考)。从功能上讲,用户自己用shared memory实现应该也可以,不过既然是顺带的,多少还是省点用户的事。具体硬件实现上便不便宜,就不得而知了。
结语
指令集的设计其实是一个挺玄学的问题。好的指令集设计与好的产品之间,其实还隔着非常多其他因素。功能贴合市场需求,性能满足要求,其实就具备了成为好产品的条件。而指令集设计本身依附于产品提供的功能和性能,它更多的是一个接口的角色:连接用户与设备,让功能和性能更容易发挥。但觉得指令集并不是决定性因素。x86指令集现在常被吐糟是过时设计,即使它已经不太强势,但生命力仍然顽强。觉得也不是光靠“兼容性”和“wintel垄断”可以解释得通的,至少它当前具有的功能和性能,一定是多年市场选择和无数技术迭代的结果。当然,好的指令集设计,可以让一个架构更通用,性能可及性更好,硬件效率更高,从而更有生命力和竞争力。
二.CUDA微架构与指令集-指令发射与warp调度
CUDA指令的发射和warp调度问题。
l 指令发射的基本逻辑,主要是指令发射需要满足的条件,几代架构发射指令的一些简单描述等等。
l control codes,主要是它与指令发射和warp调度的关系。
l warp Scheduler的功能。
l 峰值算力的计算方法和达成条件。
指令发射的基本逻辑
首先,简单回顾一下CUDA程序的等级结构。每个Kernel有一个grid,下面有若干个block,每个block有若干个warp。同一个block的warp只能在同一个SM上运行,但是同一SM可以可以容纳来自不同block甚至不同grid的若干个warp。这里要聊的指令发射和warp调度的问题,就是指同一个SM内同一个warp或是不同warp的指令之间是按照什么逻辑来调度运行的。
指令发射的一些基本逻辑:
- 每个指令都需要有对应的功能单元(Functional Unit)来执行。比如执行整数指令的单元,执行浮点运算指令的浮点单元,执行跳转的分支单元等等。功能单元的个数决定了这种指令的极限发射带宽(在没有其他资源冲突时)。
- 每个指令都要dispatch unit经由dispatch port进行发射。不同的功能单元可能会共用dispatch port,这就意味着这些功能单元的指令需要通过竞争来获得发射机会。不同的架构dispatch port的数目和与功能单元分配情况会有一些差别。
- 有些指令由于功能单元少,需要经由同一个dispatch port发射多次,这样dispatch port是一直占着的,期间也不能发射其他指令。比较典型的是F64指令和MUFU特殊函数指令。
- 每个指令能否发射还要满足相应的依赖关系和资源需求。比如指令
LDG.E R6, [R2] ;首先需要等待之前写入R[2:3]的指令完成,其次需要当前memory IO的queue还有空位,否则指令也无法下发。还有一些指令可能有conflict的情况,比如shared memory的bank conflict,register的bank conflict,atomic的地址conflict,constant memory在同一warp内地址不统一的conflict等等,这些都有可能导致指令re-issue(甚至cache miss也可能导致指令replay)。这些情况会不会重复占用dispatch port发射带宽暂时还没仔细研究。 - 在有多个warp满足发射条件的情况下,由于资源有限,需要排队等待发射,warp scheduler会根据一定的策略来选择其中的一个warp进行指令发射。
- 当前CUDA的所有架构都没有乱序执行(Out of order),意味着每个warp的指令一定是按照运行顺序来发射的。当然,有的架构支持dual-issue,这样可以有两个连续的指令同时发射,前提是两者不相互依赖,而且有相应的空余资源(比如功能单元)供指令运行(对kepler来说不一定是不同类的功能单元,后面会具体分析)。另外一个显而易见的要求是双发射的第一个指令不能是分支或跳转指令。
接着要简单讲讲Kepler,Maxwell,Turing三代架构的指令发射和warp调度逻辑。先看看这三个微架构典型chip的SM示意图(图来自各自whitepaper,注意SM的名称有点变化):
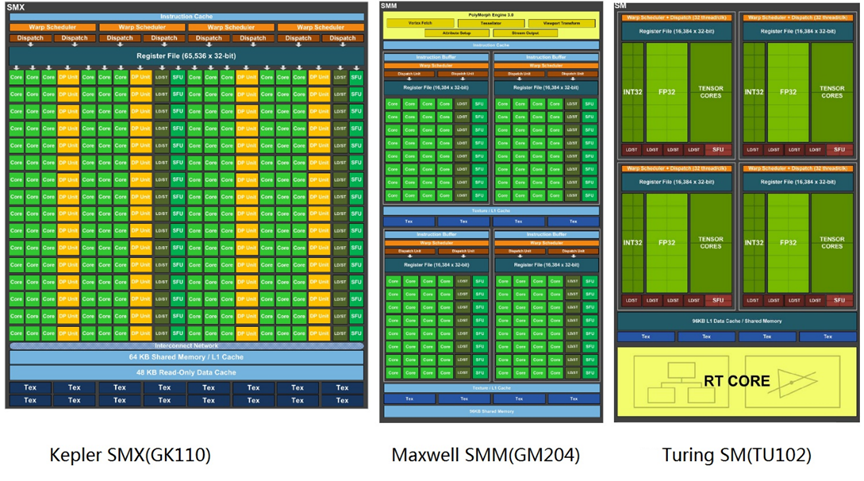
简单对比一下其中的warp scheduler和dispatch unit:
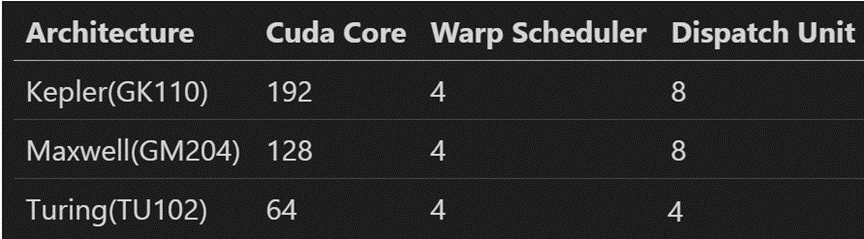
按理解,每个warp scheduler每cycle可以选中一个warp,每个dispatch unit每cycle可以issue一个指令。几个架构的区别:
- Kepler的SMX有192个core,但是core和warp没有固定的从属关系,相当于每个warp都可以运行在不同的32core组上(?这个需要进一步确认)。192=32*6,所以每个cycle最少需要发6个指令才能填满所有core。可是4个warp scheduler只能选中4个warp。所以Kepler必须依赖dual issue才能填满所有cuda core,而且由于core多且与warp没有对应关系,kepler的dual issue不一定是发给两个不同的功能单元,两个整数、两个F32或是混合之类的搭配应该也是可以的,关键是要有足够多的空闲core。每个warp scheduler配了两个dispatch unit,共8个,而发射带宽填满cuda core只要6个就够了,多出来的2个可以用来双发射一些load/store或是branch之类的指令。
- Maxwell开始,SM的资源就做了明确的分区,每个warp都会从属于某个分区,各分区之间有些功能单元(比如cuda core和F64单元,SFU)是不共享的。Maxwell的SMM有128个core,分成4组。每组有一个warp scheduler,2个dispatch unit,配32个CUDA core。这样每cycle发一个ALU指令就可以填满cuda core了,多出来的dispatch unit可以发射其他memory或是branch指令。由于功能单元做了分区,没有冗余了,这样Maxwell的dual-issue就不能发给同样的功能单元了。
- Turing的SM的core数减半,变成64个,但还是分成4个区,每个区16个core,配一个warp scheduler和一个dispatch unit。这样两个cycle发一个指令就足够填满所有core了,另一个cycle就可以用来发射别的指令。所以Turing就没有dual-issue的必要了。从Volta开始,NV把整数和一些浮点数的pipe分开,使用不同的dispatch port。这样,一些整数指令和浮点数指令就可以不用竞争发射机会了。一般整数指令用途很广,即使是浮点运算为主的程序,也仍然需要整数指令进行一些地址和辅助运算。因此,把这两者分开对性能还是很有一些帮助的。但是,这里还是要澄清一下,不是所有的浮点和整数都是分开的。这里贴一张Hotchips里NV介绍Turing的图(图上没画F64,应该是和Tensor Core、F16在一块):
-
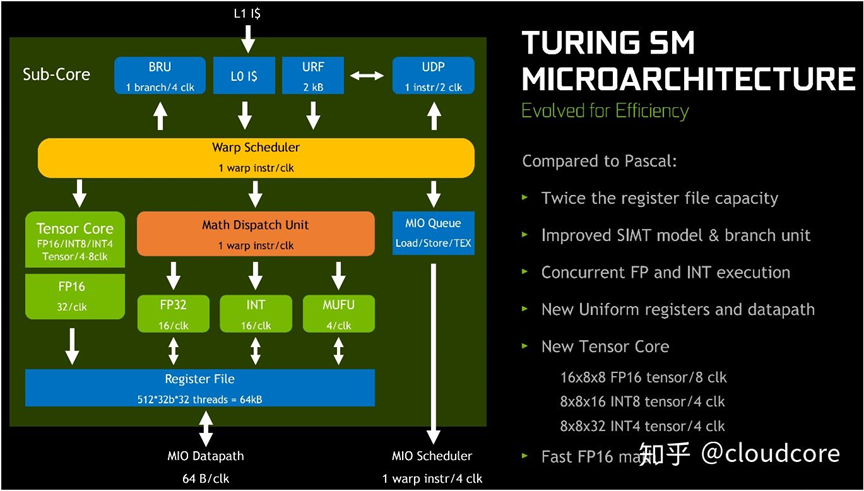
Volta和Turing的F64、F16和Tensor Core都是用的同一个dispatch port。然后F32一组(IMAD也放在这组,大概是要共享mantissa的那个乘法器),MUFU(就是特殊函数指令),其他ALU(包括整数算术运算和移位、位运算等等,但是不包括IMAD)一组,然后memory指令一组,branch指令一组,然后Turing的uniform datapath的指令一组,这些都各自有dispatch port。不同组的可以隔一个cycle发射,同组的就要看功能单元数目,最少是隔2个cycle。
Control codes
从Kepler开始,指令中就带有Control codes。Kepler的架构略显久远,格式又不太一样,信息也不太全。Maxwell后control codes的功能更加丰富了,而且在Scott Gray的文章中非常具体详尽的描述了各个域的含义和功能。Pascal的指令集与Maxwell基本一致,control codes也没什么变化。Volta和Turing,包括最新的Ampere,只是把control codes编码到每条指令中,具体内容和bit对应关系其实也没有变,所以这也不做架构的区分。这里主要复述一下Scott Gray的表述,但主要侧重它与指令发射和warp调度的关系。
这里以Turing为例,选了一段程序,把对应的control codes 写在前面(这里用的格式与Scott有点区别,主要是看起来更方便):
1: [----:B------:R-:W0:-:S04] S2R R113, SR_CTAID.Y ; 2: [----:B------:R-:W1:-:S04] S2R R0, SR_CTAID.Z ; 3: [----:B------:R-:W3:-:S01] S2R R106, SR_TID.X ; 4: [----:B0-----:R-:W-:-:S02] IMAD.SHL.U32 R113, R113, 0x4, RZ ; 5: [----:B-1----:R-:W-:Y:S03] IMAD.SHL.U32 R0, R0, 0x4, RZ ; 6: [R---:B------:R-:W-:-:S02] IADD3 R107, R113.reuse, 0x1, RZ ; 7: [R---:B------:R-:W-:-:S01] IADD3 R109, R113.reuse, 0x2, RZ ; 8: [R-R-:B------:R-:W-:-:S01] IMAD R2, R113.reuse, c[0x0][0x1a8], R0.reuse ;9: [----:B------:R-:W-:-:S01] IADD3 R111, R113, 0x3, RZ ;这里采用的显示形式是类似R-R-:B------:R-:W-:-:S01这种,用冒号":"分隔开6个域:Register Reuse Cache(4bit,对应4个slot,有reuse就写R,没有就"-"),Wait Dependency Barrier(6bit,B+6个数,有等待就写上对应的barrier号0-5,否则写“-”),Read Dependency Barrier(3bit,R+设置的barrier号,不设置写“-”),Write Dependency Barrier(3bit,W+设置的barrier号),Yield Hint Flag(1bit,“Y”表示yield,否则写“-”),Stall Count(4bit,S+十进制的stall的cycle数)。
这里与scott的标记的区别一是显式的写了reuse,而不是只写在后面汇编文本里。这样看起来更直观且容易看到slot的对应关系,因为有的predicate夹在中间容易搞混。二是wait barrier的每个bit拆开了,这样肉眼更容易与前面设置barrier的R#或是W#对应上。然后就是每个域前加了提示字符,BRWS之类,毕竟有的时候看久了也容易恍惚,这样区分比较明显,不容易搞混。
【更正1】:这里包括后文说的Dependency Barrier也许更合理的称呼是Scoreboard,在profiler里有short scoreboard和long scoreboard之分,应该指的就是这个。
【更正2】:scoreboard的编号调整过一次。由于最开始沿用了scott的1-6的编号方式,但后来还是调整为更符合原语境的0-5。首先这是原编码的值,其次DEPBAR后会显式的接SB0~SB5这种数,所以后来就统一改为0-5。
下面具体介绍control codes每个域的含义。
Register Reuse Cache
Register Reuse Cache有4bit。每个指令有4个slot,每个register的source operand的位置对应一个slot(predicate好像不算)。暂时还没碰到4个source operand的指令,所以有一个bit好像一直没用到。Reuse的用法:如果当前指令某个slot的register还会被下一个指令的同一个slot读取,那就可以reuse当前指令读取到的register内容。Reuse的作用主要就是减少GPR的读取,一来可以减少register bank conflict,二来应该也能省一点功耗。比如前面代码中Line6的IADD3的第一个源操作数是R113,而Line7的第一个源操作数也是R113,所以可以reuse。同理,line7、line8同样位置的R113都可以reuse。但是line8的R0为什么reuse呢?也没搞懂。Reuse是唯一在官方反汇编中出现的control codes,但也有很多疑点。
几个猜测:首先reuse是个cache,某种意义上是个hint,也就是说就算set了,reuse不了应该也不至于出错。第二,reuse cache的位置应该是位于所谓的operand collector。这个应该是很多功能单元公用的,所以不太可能是同种功能单元的指令才能reuse。另外,load store类的指令没看到reuse,好像是不用collector。第三,如果切换到别的warp,register是不同的空间,那reuse cache就失效了。所以reuse应该是需要当前warp的指令连续发射。第四,reuse既然是register的cache,那原来register的位置出现了constant memory或是immediate会不会使reuse失效呢?感觉好像不会。那RZ会不会呢?UR会不会呢?也没仔细研究过。
Reuse这里还有很多奇怪的问题,有的怀疑是编译器的bug。比如这种:
1: [R---:B------:R-:W-:-:S02] FSETP.GT.AND P1, PT, R9.reuse, c[0x0][0x18c], PT ;2: [----:B------:R-:W-:-:S02] LEA.HI.X.SX32 R4, R4, c[0x0][0x164], 0x1, P3 ; 3: [R---:B------:R-:W-:-:S02] LEA R5, P3, R0.reuse, R5, 0x2 ; 4: [----:B------:R-:W-:-:S02] FSEL R9, R9, c[0x0][0x18c], !P1 ; 5: [----:B------:R-:W-:-:S02] LEA.HI.X R4, R0, R4, R3, 0x2, P3 ;其中Line1的R9只能在Line4中得到reuse,但之前的这个slot已经被Line2的R4用过了,应该是没法reuse的。Line3也是一样,R0只能在Line5中被reuse,但中间被Line4打断了。如果把Line4提到第2行前面去,这好像就顺理成章了:
1: [R---:B------:R-:W-:-:S02] FSETP.GT.AND P1, PT, R9.reuse, c[0x0][0x18c], PT ;4: [----:B------:R-:W-:-:S02] FSEL R9, R9, c[0x0][0x18c], !P1 ; //原先在第4行,依赖Line1的输出P1,如果放在这就要等barrier
2: [----:B------:R-:W-:-:S02] LEA.HI.X.SX32 R4, R4, c[0x0][0x164], 0x1, P3 ; 3: [R---:B------:R-:W-:-:S02] LEA R5, P3, R0.reuse, R5, 0x2 ; 5: [----:B------:R-:W-:-:S02] LEA.HI.X R4, R0, R4, R3, 0x2, P3 ;由于Line4的FSEL用到了Line1的输出P1,为了把依赖指令移到后面以减少stall,编译器做了相应的指令调度,但是reuse却没有重新生成。所以怀疑这个是编译器的bug,存疑中。
Wait Dependency Barrier
Wait Dependency Barrier有6bit,每个bit表示是否需要等待对应的dependency barrier。每个线程有6个dependency barrier,每个barrier都可以被后面的Read或Write操作设置上。设置wait dependency barrier是等待依赖的其中一种方式。SASS里面还有一个对应的指令,如DEPBAR.LE SB0, 0x0, {2,1} ;,两者自由度不太一样。control codes里设置的barrier只能是bool形式,要么dependency resolved,要么就是not ready。而DEPBAR可以等待有计数的barrier。比如发了8个memory指令,其实设置的是同一个dependency barrier,每发出一个计数加1,每回来一个计数减1。这样DEPBAR可以等计数降到6就说明前面2个指令已经到位了,对应的load结果就能用了。而如果用control codes来等待,就只能等计数降到0,也就是8个都ready才行。
dependency barrier有一个和分支指令强相关的地方,比如不确定的跳转指令(带predicate的BRA,或是BRX这种指令)需要等待当前所有已设置的dependency barrier都到齐才行。否则后面多个分支的代码可能用到这个barrier,但又不一定都会等待。这个可能是编译器在处理上有一些图方便的地方。有些情况是可以把wait后移到对应使用指令上的,这样延迟更容易被隐藏。只是有时候编译器拿不到足够的信息,为保证正确性就统一在跳转的时候等了。
Read Dependency Barrier
Read dependency barrier有3bit,表示需要设置的6个barrier中对应的索引(0~5,对应barrier 1-6,如果不需要设置barrier,就设置为0b111)。Read dependency barrier主要是一些指令不会在一开始就把所有操作数读进去,所以需要hold住GPR的值,防止后面的指令在它读取其内容之前把GPR改掉。使用Read dependency barrier的主要是memory类的指令,但是一些转换指令如F2I/I2F之类好像偶尔也能见到。
Write Dependency Barrier
Write dependency barrier与read dependency很类似,也是3bit,后面跟barrier索引。注意Read和Write两者用的dependency barrier资源是一样的,也都是上面wait的那6个。Write dependency barrier比较好理解,就是某个指令要把操作结果保存到某个GPR或是predicate中,使用barrier进行保序可以防止出现data race。不过这主要针对的是不定长latency指令。如果一个指令的latency是确定的(或者有不太长的上限),那用后面提到的stall cycle停足够长时间就可以保证没有race。
Yield Hint Flag
Yield hint flag是1bit。如果Yield,就表示下一个cycle会优先发射其他warp的指令。前面聊reuse的时候也说了,reuse是需要连续发射同一个warp的指令的。所以reuse和yield是不会联用的。另外,SASS有一个专门的指令YIELD,感觉上是一样的功能(【注】:经评论区提醒,功能还是不一样的,具体请移步评论区)。Yield的存在仿佛暗示warp scheduler不是round robin的选择warp,而是倾向于一直往同样的warp里发射指令(如果可以一直发射的话,有stall肯定就尽量切走了)。但是这个东西也不太确定,没仔细测过。如果真是这样,yield的作用就是保持各个warp之间的进度均衡,否则在barrier之类的指令上会有较大的等待开销。而且如果退出时间差很大,也会导致一些资源不能尽快回收以容纳新的block。
【补充】:根据评论区所说,也许yield这个bit就是stall count的高位。只是假如这个bit不为0,那stall的cycle会>16,相当于warp被切换的概率也会大大增加。两者之间的具体含义应该还和具体指令有关,不同类型的指令也许是不一样的。这个问题还没有具体研究过。先存疑。
Stall Count
Stall count有4bit,表示当前指令后需要stall指令发射的cycle数,然后再决定是不是要继续发射。这个cycle数受到极限发射带宽的约束,很多时候可以用来反推功能单元的分组和数目。比如Maxwell下有双发射,所以可以stall 0 cycle,在反汇编中会用大括号组合起来,比如这种:
/*0008*/ MOV R1, c[0x0][0x20] ; /* 0x4c98078000870001 *//*0010*/ { MOV R5, c[0x0][0x148] ; /* 0x4c98078005270005 *//*0018*/ S2R R0, SR_TID.X } /* 0xf0c8000002170000 */Kepler的双发射不限定功能单元,Turing架构没有双发射,就都没有这种形式了。
再找个Turing的例子来看一下:
[----:B------:R-:W-:-:S01] IADD3 R43, -R43, R28, R36 ; // STS与IADD3不同功能单元,stall 1 cycle
[----:B--2---:R0:W-:-:S04] @!P3 STS.128 [R31.X16], R8 ; //两个STS间至少stall 4 cycle,
[----:B---3--:R1:W-:-:S04] @!P5 STS.128 [R31.X16+0x2100], R16 ; [----:B----4-:R2:W-:-:S01] @!P4 STS.128 [R51.X16+0x2200], R12 ; [R-R-:B0-----:R-:W-:-:S01] IADD3 R11, -R28.reuse, 0x20, R43.reuse ; // IADD3是Integer pipe,IMAD是F32 pipe,不共dispatch port,stall 1 cycle
[----:B------:R-:W-:-:S01] IMAD.IADD R8, R43, 0x1, -R28 ; [----:B------:R-:W-:Y:S02] IADD3 R9, -R28, 0x10, R43 ; // IADD3和ISETP同属普通Integer pipe,stall 2 cycle
[R---:B------:R-:W-:-:S01] ISETP.GE.U32.AND P3, PT, R0.reuse, R11, PT ; // ISETP与LDG属不同功能单元,stall 1 cycle
[----:B-1----:R0:W5:-:S01] @!P2 LDG.E.128.CONSTANT.SYS R16, [R24+0x200] ;前面已经讲过,Turing的两个周期发一个ALU指令就可以用满cuda core了,所以同组ALU指令至少stall 2 cycle。如果两个指令间只stall 1 cycle,说明这两个指令应该分属不同的功能单元(或者说不共用dispatch port),可以分开发射。如果stall的时间更长,说明其发射带宽比较低,比如LDG/LDS/STG/STS这种memory指令都是4 cycle才能发一个。但是也有一些奇怪的例子:
[----:B------:R-:W-:-:S01] IMAD.WIDE.U32 R2, R5, 0x3, R2 ; [----:B--2---:R-:W0:-:S01] I2F.S16 R4, R4 ; [----:B---3--:R-:W1:-:S01] I2F.S16 R6, R6 ; [----:B----4-:R-:W2:-:S01] I2F.S16 R7, R7 ; [----:B0-----:R-:W-:-:S01] FADD R8, R4, -c[0x0][0x194] ; [----:B------:R-:W-:-:S01] SHF.R.S32.HI R4, RZ, 0x1f, R5 ; [----:B-1----:R-:W-:-:S02] FADD R9, R6, -c[0x0][0x198] ;I2F居然是挺机关枪,每cycle都可以发。可是按programming guide中的Instruction Throughput表,I2F如果不涉及F64,是1/4的throughput。难道是有特别的queue做buffer?这个也没太明白,有待进一步研究。
其他
Control codes一个比较容易忽视的问题是它与predicate是独立的。也就是说不管加不加predicate,control codes的作用是不会改变的。因为本身control codes很多东西是编译期决定的,如果按运行期的predicate来定是否启用control codes,有些代码的正确性就容易出问题。
Control codes是个很复杂的问题,有些东西真是纯逆向了。也没仔细研究过。大家有兴趣可以看看scott gray的maxas的实现,或许会有一些启发。
Warp Scheduler
Warp scheduler的作用就是管理一系列的warp,在那些满足条件的warp中选中一个来发射指令。就绪可以发射指令的warp就是eligible,不满足发射条件的warp就是stalled。导致warp不能发射指令的原因有很多种。根据NSight Visual Studio Edition中Issue Stall Reasons中的描述,大致搬运翻译一下:
- Pipeline Busy:指令运行所需的功能单元正忙。
- Texture: Texture单元正忙,或者说已经下发的request过多。
- Constant:Constant cache的miss。一般说来,多数情况下constant cache的hit rate还是很高的,所以一般只会在第一次access的时候miss。
- Instruction Fetch:Instruction cache的miss。与constant cache的miss类似,一般只有第一次运行到的地方才容易miss。比如
BRA新跳转到的地方,或是Instruction cache的cache line的边界处。 - Memory Throttle:有大量memory操作尚未完成,导致memory指令无法下发。可以通过合并memory transactions来缓解.
- Memory Dependency: 由于请求资源不可用或是满载导致load/store无法执行,可以通过内存访问对齐和改变access pattern来缓解。这个与memory throttle的细微差别还没仔细研究过。
- Synchronization:warp在等待同步指令,如cuda C里的
_syncthreads(),对应SASS里的BAR指令。 - Execution Dependency:输入依赖关系没解决。简单说,就是输入值未就绪,就是在等control codes里的dependency barrier。单个warp内通过增加ILP可以减少依赖型stall。如果ILP不够用,这个stall就会形成额外的latency,只能用TLP来隐藏了。
在Profiler里提供的Turing的performance counter里,还有两个当前warp不能发射指令的原因:
stall_not_selected: warp当前虽然eligible,eligible的warp超过一个,当前的未被选中,所以不能发射。stall_sleeping: 这个一般是用户自己调用sleep功能让该warp处于睡眠状态。
贴一个Nsight里的stall reason统计图:

Warp Scheduler的另一个关键功能是在eligible里选一个来发射。很多早期的书上都说选warp是round-robin,就是所谓的轮询,发一个换一个。当前的几代架构,至少maxwell之后,觉得应该不是这个策略了。前面聊reuse,yield和stall的时候也提到了,如果是round-robin,这些东西都会显得很奇怪了。所以感觉它应该是比较aggresive的往同一个warp发射指令,除非stall了。当然,中间如果没有yield,那stall 2个cycle的时候中间那个cycle能去发射别的warp吗?这个也有点迷,有机会再仔细研究下。
【补充】:仔细再想了想,stall 2cycle的时候中间那个cycle应该是可以发射其他不用operand collector的单元,比如memory和branch。网上看到一些说法,有些S2R的指令好像也是走的memory的pipe,那应该也可以发射。这个应该是可以写一个micro-benchmarking的case验证一下,只是手上没有Turing的卡,也没法测了。但是感觉只要它不影响reuse的cache,那就应该可以抽空发射。这也是一个比较符合性能需求的模式。
Eligible的warp数是影响峰值性能的关键表征之一,如果每个cycle都至少有一个eligible warp,那功能单元基本就会处于满载状态,性能一般也会比较好。这也是occupancy真正起作用的方式。
关于峰值算力的问题
最后要略微展开聊一下峰值算力的问题。NV的GPU经常用CUDA Core这个词来表示算力强弱,这其实是Int32/Float32功能单元的marketing叫法。算力评估常用的单位是FLOPS,表示FLoat OPerations per Second(Flops有时候也用作Flop的复数,注意鉴别)。对于F32而言,FADD/FMUL都是一个指令一个flop,FFMA一个指令同时算乘加所以是两个flop。所以一般NV的GPU的F32峰值算力计算方法为:
SM数 * 每SM的Core数 * 2 * 运行频率
最后结果常用GFlops或是TFlops表示。其中乘以“2”是因为FFMA是两个flop。比如说Maxwell架构每个SM有128个CUDA core,每个SM每cycle可以发射128条Int32或Float32指令(两种指令不能同时发射,所以是或)。Maxwell架构的GTX 980有16个SM,共16 * 128=2048个CUDA core,每个cycle能做2048 * 2Flops/FFMA=4096 Flops。980的base clock是1.126GHz,相当于每个cycle是1/1.125G秒,每个Cuda Core每秒可以发射1.126G条指令,整个GPU就是1.126G*4096=4.5TFlops。放在一起算,就是峰值算力等于:
16 SM * 128 Core/SM * 2 Flop/Core/Cycle * 1.126G Cycle/second = 4.5TFlops.
当然,商家为了宣传,常用boost clock算峰值算力,非公版的频率也会有些差别,所以这个值会有些变化。另外,这里用的是F32浮点峰值做例子,如果任务不需要浮点运算或是精度不是F32,这个值就意义不大,需要转换成需要的那个操作。现在AI处理器常常宣传峰值是多少FLOPs,或是多少IOPs,一般也会限定是F32,F16或是I8之类。因为每种操作对应的指令是不一样的,峰值当然也可能不一样。顶级HPC计算卡F64一般是F32的一半,但消费级显卡F64多数会有阉割。如果没有TensorCore而用packed F16(把两个F16塞到一个32bit GPR里同时运算),F16峰值性能通常是F32的两倍。有TensorCore时则要另行计算,要看具体TensorCore的数目和指令带宽,还有能不能和其他指令同时发射等。其实不看Tensor core的话,满血版一般有:F64:F32:F16=1:2:4,正好与占用的GPR成反比,这个其实是与GPR的带宽有很大的关联的,一般满血版的卡的功能单元配比就会尽量按极限的GPR带宽来设计。
这里贴一个Ampere的white paper中V100和A100的几种峰值性能对比:

要达到F32的峰值性能,需要满载发射FFMA指令,这是很苛刻的条件。首先,其他与FFMA共用dispatch port的指令,每发射一个都会挤占FFMA的发射机会。其次,由于多数情况下数据要从memory中来,而memory操作比ALU慢很多,常常导致指令操作数无法就绪,从而有些周期没有FFMA指令可发。同时还有其他一些overhead或是occupancy问题导致有些SM无法满载,从而无法达到峰值。一般说来,实际应用中,较大尺寸的矩阵乘法(GEMM)是难得的能接近峰值性能的程序,有些实现能到98%峰值的效率。但多数实际应用效率都远不及此,很多memory bound程序能到10%就很不错了。超算TOP500排名中,多数HPL效率都是50~60%左右,更接近实际应用的HPCG效率一般都在2~3%左右。虽有规模大导致的互联开销原因,但总体来讲实际应用的峰值性能离极限值还是差距很大的。
每种类型的指令都有一个峰值性能,那是不是能同时达到呢?基本是不能。对于共用dispatch port就不说了,要相互竞争发射机会,发射一条这种指令就少发射一条那种指令,所以显然不能同时到达峰值。如果是不同的dispatch port呢?理论上可以,但是实际上也会比较难。比如说Turing的F32和I32,首先I32的2IOP指令IMAD是和F32一伙的,相互竞争dispatch port,所以两个不能同时到达峰值。剩下的IADD3或是LEA之类的指令理论上可以与F32的并行,倒是有机会冲一冲。只不过多数实际应用中很难做到这么好的运算配比,而且register的bank conflict之类应该也会大大限制这两种指令的同时运行。另外,即使两者配合完美,它还是需要省出一些发射带宽给其他配套指令(比如memory load),不可能完全占满。
本文将两篇文章整理了一下。
参考文章链接如下:
