


征程5模型优化技术动态
征程5模型优化技术动态
SwinT部署优化探索,Transformer在征程5上跑得既快又好?
摘要:SwinT是目前视觉transformer模型中的典型代表,在常见视觉任务,如分类、检测、分割都有非常出色的表现。虽然在相同计算量的模型指标上,SwinT已经可以和传统CNN为基础的视觉模型相媲美,但是SwinT面向不同平台的硬件离线部署仍然存在很多问题。本文以SwinT在地平线征程5平台上的量化部署为切入点,重点介绍两个方面,一方面是如何通过调整量化配置训练得到SwinT最优的量化精度,另一方面是如何通过调整模型结构使得SwinT在征程5平台上能够得到最优的延时性能。最终在地平线征程5平台上,可以通过低于1%的量化精度损失,得到FPS为133的部署性能。同时该结果与端侧最强GPU上SwinT的部署性能相当(FPS为165)。
简介
Transformer用直接计算sequence间元素的相关性(attension)在NLP方面彻底替换了RNN/LSTM,近年来很多工作都在尝试把Transformer引入到视觉任务中来,其中ViT,SwinTransformer等都是视觉Transformer的典型代表。
SwinT主要是解决Transformer应用在图像领域的两个问题:图像的分辨率很大、视觉实体的尺寸区别很大。这都会造成Transformer在图像领域的计算代价巨大。SwinT通过层级式的transformer和移动窗口,在计算量可控的情况下,利用Transformer得到图像在不同尺度下的特征表示,从而直接在现有视觉框架下,部分替换CNN。
根据SwinT论文中提供的结论,SwinT在分类、检测、分割等经典视觉任务上都有很好的表现,但是相对于传统CNN来说,并没有绝对的优势。尤其在检测部署的帧率上,使用SwinT作为backbone的情况下,参数量比较大,同时帧率会出现显著的下降。其实涉及到Transformer相关的模型,在目前已有的计算平台上的量化部署都会遇到类似的问题。
SwinT的量化主要有三种问题:第一,算子量化(包括部署)不支持,如roll算子在旧的ONNX框架上没有支持;第二,算子自身不适合直接量化,如LayerNorm,Softmax,GeLU等,这些算子直接量化一般会造成比较大的精度损失;第三,辅助信息的输入,如位置编码,需要注意量化的方式。
SwinT的部署主要有两种问题:第一,Vector计算占比比较大,如Elementwise、Reduce等;第二,数据不规则搬运的算子比较多,如Reshape、Transpose等。这些原因导致SwinT对大算力张量计算的平台来说并不友好。
因此本文主要着重对于上面提到的,SwinT在地平线征程平台上的量化部署问题,有针对性的提出量化和部署需要改进的地方,得到SwinT在征程5平台上的最优量化部署性能,同时这种建议未来也可以推广到在征程5平台上优化任何Transformer相关的模型。
优化方法
1.基本情况
在优化之前,首先明确一下SwinT在征程5平台上支持的基本情况,这些情况能够保证SwinT可以在征程5平台上运行起来,然后才能进一步讨论优化方向和优化思路。
- 算子支持情况
SwinT公版模型需要的所有算子列表如下:
reshape、permute、transpose、view、roll、LayerNorm、matmul、mean、mul、add、flatten、masked_fill、unsqueeze、AdaptiveAvgPool1d、GeLU、Linear。
目前,在地平线的量化工具和征程5平台上,以上SwinT需要的所有算子都是可以完全支持的,这是保证SwinT能够在征程5平台上正常运行的基础。
- 量化精度
在SwinT的量化过程中,使用Calibration+QAT的量化方式得到最终的SwinT的量化精度。由于SwinT中所有算子的量化是完全支持的,那么得到初版的量化精度是非常简单的。
不过在默认的量化配置下,初步的量化精度只有76.90%(浮点80.58%),相对于浮点下降接近于4个点。这是比较明显的量化损失。需要说明的是,默认的量化配置是指全局采用int8的量化方式。
- 部署情况
SwinT模型在地平线征程5平台的初次部署,性能极低,FPS小于1,几乎处于不可用的状态。通过分析发现,SwinT相比于传统CNN的模型,Vector计算占比比较多,如Elementwise、Reduce等;同时数据不规则搬运的算子较多,如Reshape,Transpose等。这些特性对大算力张量计算的征程5平台来讲极不友好。
这里有一些征程5平台部署SwinT的情况分析:
- SwinT模型张量Tensor与向量Vector的计算比例大约是218:1(将矩阵乘运算归类为张量运算),而征程5平台的实际张量运算能力与向量运算的计算比例远高于此,导致SwinT在征程5平台的利用率不高。
- Reshape / Transpose 等数据搬运算子占比较高。在Transformer之前的CNN模型没有这方面的需求,因此初次处理SwinT相关的Transformer模型时,这类算子除了本身的实现方式,功能、性能优化都不太完善。
2.量化精度优化
因为SwinT的量化训练,主要是采用Calibration+QAT的方式来实现的,因此量化精度的优化,主要从两个方面入手,分别是算子的支持方式、量化训练的参数配置。
- 算子的支持方式
算子的支持方式,主要是针对一些量化不友好的算子,在中间结果引入int16的量化方式,这在地平线征程5平台上是可以有效支持的。常见的量化不友好算子,如LayerNorm,SoftMax等。以LayerNorm为例:其量化方法是使用多个细粒度的算子(如mul,add,mean,sqrt)拼凑起来的。为了保证量化的精度,尤其是mean的操作,因此LayerNorm除了在输入输出端使用int8量化之外,中间的结果均采用int16的量化方法。
使用方式:参考目前地平线提供的QAT量化工具,浮点算子到QAT算子的自动映射。用户只需要定义浮点模型,由QAT工具自动实现浮点和量化算子的映射。因此大部分量化算子的实现方式,用户是不需要感知的,尤其像LayerNorm和SoftMax这种算子的量化方式,工具本身默认提供int16的量化方式,用户只需要正常使用社区的浮点算子即可,而不需要再手动设置QAT相关的配置。
注:需要说明的是,LayerNorm有时候需要使用QAT量化工具提供的浮点算子,但原因在部署优化中会提到,和算子量化方式的支持没有关系。
- 量化训练的参数配置
量化训练的参数配置主要分为量化配置和训练的超参配置。量化配置除了算子自身的实现方式外,主要是针对输入输出的调整,输入分为两种类型,如果是图像输入,可以采用固定的scale(一般为1/128.0);如果是辅助信息输入,如位置编码,需要采用统计的动态scale,才能使得量化过程保留更多输入信息。而对于模型输出默认采用更高精度的方式(如int32)即可。
使用方式:量化训练过程的超参设置,则比较简单,常见的调整内容如Lr大小,Epoch长度等,详细内容参考量化训练工具提供的Debug文档。
3.部署优化
部署优化的前提是不改变模型的结构和计算逻辑,不需要重训模型,模型参数可以等价复用。基于这样的原则,从编译器的角度,结合SwinT模型的计算方式,对SwinT在征程5平台上的部署进行针对性的优化。
上文中分析了SwinT的部署主要有Vector计算占比过高和不规则数据搬运算子较多这两个问题,因此,整个编译器优化的方式,其实就是通过软件优化Tile,提高数据复用,减少了数据加载带宽,算子合并实现优化。
接下来重点讲一下,从编译器的思路出发,根据编译器可以优化的内容,要么编译器内部优化,要么模型有针对性的进行调整,最终可以得到SwinT部署的最优性能。需要注意的是,如果是模型需要针对性调整的地方,会在具体的使用方式中体现出来。如果不需要调整,属于编译器内部优化的,则会自动沉淀到编译器默认使用方式中去,直接使用即可。
- 算子映射的优化
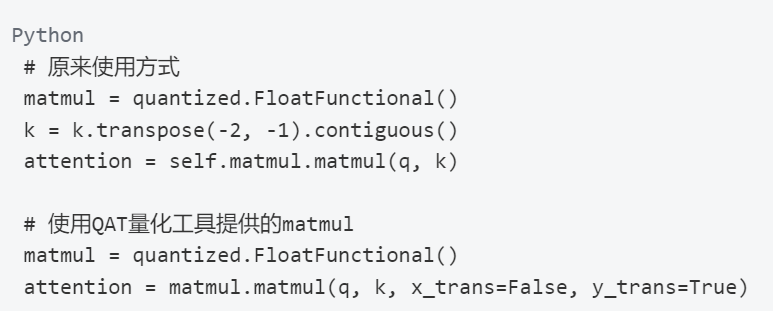
将不同的算子进行灵活的映射,充分利用硬件资源,增加并行计算的机会。如使用Conv运算部件实现Reduce操作;使用MatMul实现Transpose等。
matmul的优化使用方式:LayerNorm的优化使用方式,这里是单独的transpose优化,和上文中用户不需要感知的int16量化(默认使用)区分开来:

算子优化
算子优化主要是针对算子实现方式的单独优化,如Reshape/Transpose算子Tile优化,Batch MatMul的支持优化等。
使用方式:其中Batch MatMul的优化,内部batch级别的循环展开的Tile优化,由量化工具和编译器内部完成,用户不需要感知。
- 算子合并
征程5平台是张量运算处理器,数据排布是多维表示,而Reshape,Transpose的表达语义是基于CPU/GPU的线性排布。连续的Reshape & Transpose操作,例如window partition、window reverse,征程5平台可只进行一次数据搬运实现。
编译器内部,连续的reshape可合并成一条reshape,连续的transpose算子可合并成一条permute,征程5平台可一次搬运完成。
而window partition,window reverse则被封装成独立的算子,在模型,量化,部署阶段,直接使用即可,这样可以让编译器在部署过程中获得最佳性能。
使用方式:

- 其他图优化
对于pixel to pixel计算的算子或者数据搬运的算子(如elementwise,concat/split的部分轴),reshape/transpose算子可穿透这些算子,前后移动reshape/transpose穿透以上算子,移动后可进行算子合并的优化。
使用方式:这些优化由编译器内部完成,用户不需要感知。
- 4维高效支持
地平线征程5平台最早针对的是以CNN为基础的图像处理,但在实践过程中,逐渐衍生出支持语音,Transformer等类型的模型。不过以CNN为基础的模型仍然是效率最高的模型,这一点在编译器内部的体现就是4d-Tensor仍然是最高效的支持方式。
如果不是4d-Tensor的话,很多算子编译器内部也会主动转成4d(某些维度为1)来做,结合编译器常规的padding方式(如2H16W8C/2H32W4C对齐),会导致一些计算如Conv,MatMul的效率很低,因为多了很多无效的计算。
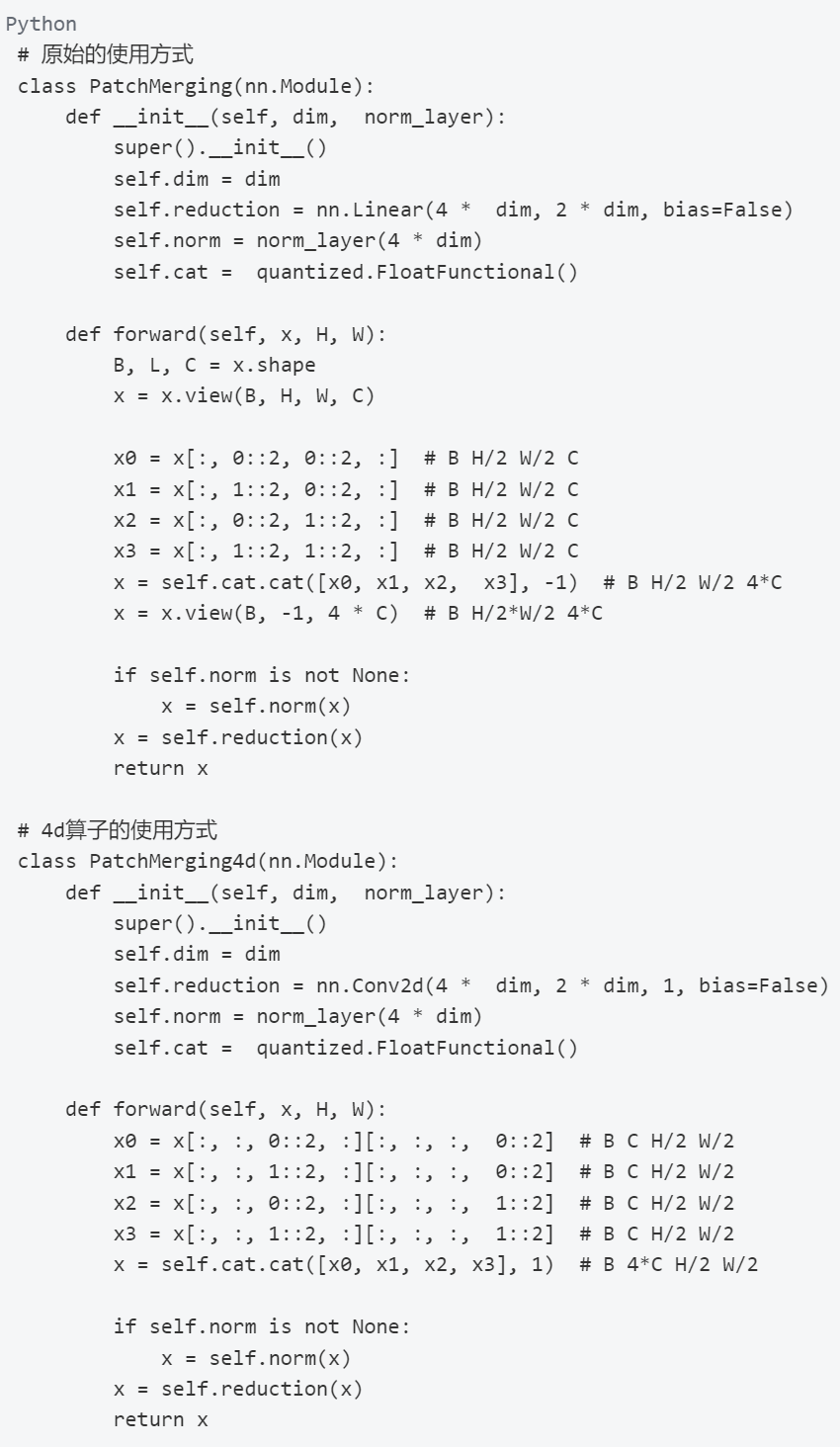
这一点在模型上的体现就是,可以使用常规的4维算子替换原来任意维度的设置,避免不必要的冗余计算。常见的替换方式如下,中间配合任意维度的reshape,view,transpose可以完成等价替换。
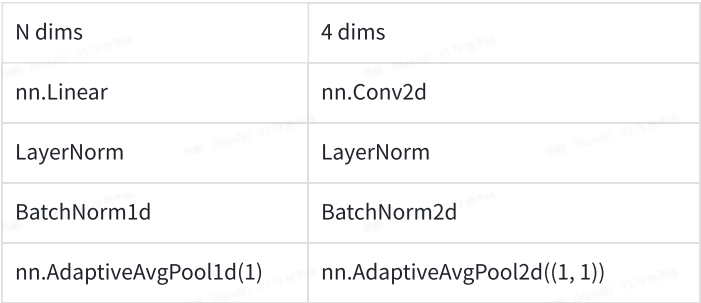
使用方式(以patch merging为例):
实验结果
1.SwinT在征程5平台优化结论
- 量化效果

- 部署效果
通过优化,SwinT在征程5平台上,可以达到的FPS为133。

注:-代表缺失实际的统计数据
参考SwinT在端侧最强GPU上的部署性能(FPS=165),地平线征程5平台部署SwinT模型,在有性能保证的情况下,具有一定的精度优势。
2.Transformer在征程5平台上的优化建议
在完成SwinT在征程5平台上的高效部署之后,其实也可以得出常见的Transformer征程5平台上的优化思路。这里简单列一些方向供参考。
- 使用已封装算子
上面提到的window partition,window reverse,在模型层面封装成一个算子,编译器只进行一次数据搬运即可完成高效部署。因此建议在模型搭建阶段使用已经封装好的算子,其他常见的还有LayerNorm,MatMul等。未来地平线也会提供更多定制算子的高效实现,如MultiHeadAttention等。
- Tensor的对齐建议
征程5平台运算的时候有最小的对齐单位,并且不同的算子对齐不一致,以下简单列出常见的征程5平台运算部件的计算对齐要求:

2H16W8C,表示计算的时候H方向对齐到2, W方向对齐到16,C方向对齐到8,例如:
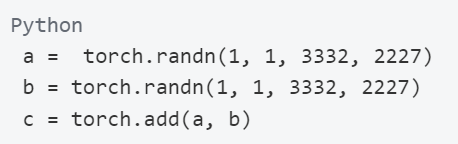
以上elementwise add 实际计算为数据对齐后的大小[1,2,3344,2232], 所以尽量让算子的对齐浪费少些。如果像layernorm中有连续的如上的elementwise操作,其实可以将Tensor reshape为[1,2,1666, 2227] 再进行连续的elementwise计算。
按照征程5平台的计算对齐合理的构建Tensor大小能提高征程5平台的计算利用率。因此结合SwinT部署优化中的4维高效支持的建议:4d-Tensor,结合合理的大小设置,可以稳定提供部署的利用率。
- 减少算子间的Reorder
根据Tensor对齐建议中提到的征程5平台不同的运算部件有不同的对齐,在不同运算部件切换的时候,除了计算对齐浪费的开销,还有数据Reorder的开销,即从2H16W8C 向256C转换的开销。所以在此建议构建模型顺序的时候尽量避免不同计算对齐的算子连续横跳。
在此给一些优化的建议,比如Conv->ReduceSum->Conv串接的模型,其实reduce sum也可以替换成用conv实现,比如reduce on C可以构建为input channel = C, output channel = 1的conv, reduce on H/W 可以构建为kernel_h = H or kernel_w = W 的conv。
总结
本文通过对SwinT在地平线征程5平台上量化部署的优化,使得模型在该平台上用低于1%的量化精度损失,得到FPS为133的部署性能,与主流竞品相比效果相当。同时,通过SwinT的部署经验,推广到所有的Transformer,给出Transformer在征程5平台上高效部署的优化建议。
BEV感知落地难?选征程5就对了!
近日,理想L系车型迎来重大OTA,理想AD Pro标配的高速NOA功能正式上车,为用户带来“标配即顶配”的极致驾乘体验。作为全球首个基于地平线征程®5芯片的智能驾驶系统,AD Pro与AD Max底层均采用了理想全栈自研的混合式BEV算法框架,实现从8MP前视到360°全方位周视感知进化。从特斯拉掀起纯视觉浪潮,到以理想为代表的新势力与新实力纷纷布局“重感知,轻地图”的技术路线,领先的BEV感知也必将引领高阶自动驾驶量产新范式。

基于征程5芯片打造的理想AD Pro智能驾驶系统
随着智驾功能从基础向高阶迈进,自动驾驶所面临的道路场景也更加复杂,目标维度和数据量呈指数级上升给系统感知能力带来了巨大挑战。BEV(Bird's Eye View)感知的诞生,为解决高阶自动驾驶感知难题提供了有效路径。BEV通过车身传感器的图像输入,将感知到的现实场景、道路目标乃至时序信息,融入进统一的时空坐标系中,以自车为中心提供从高处统观全局的“上帝视角”,为自动驾驶规划与控制提供更加实时、精准、全面的决策依据。

BEV感知以自车为中心提供自上而下的“上帝视角”
软硬结合,征程5为BEV部署提供全方位支持
BEV感知正受到智能驾驶玩家的追捧,但更先进技术也伴随着更大的落地挑战。想要更好、更快、更全面地实现BEV感知部署与落地,更是面临着硬件、软件、数据等多个维度的难点。而早在2021年7月,地平线在发布新一代征程5车载智能芯片的同期,便推出基于征程5的纯视觉BEV感知原型方案,这也恰恰印证了征程5对BEV感知的原生支持。

基于征程5的BEV感知原型方案
地平线始终坚持“软硬结合”的技术路径,从场景中来,到场景中去。通过对深度学习算法演进趋势的深度洞察以及对领先自动驾驶应用技术的前瞻探索,地平线结合突破性的计算架构创新技术,打造了专门面向高等级智能驾驶的BPU®贝叶斯深度学习加速引擎。集成双核贝叶斯的征程5,单颗芯片算力高达128TOPS,同时具备领先同级竞品的真实计算性能,这也为BEV感知提供坚实的算力底座。
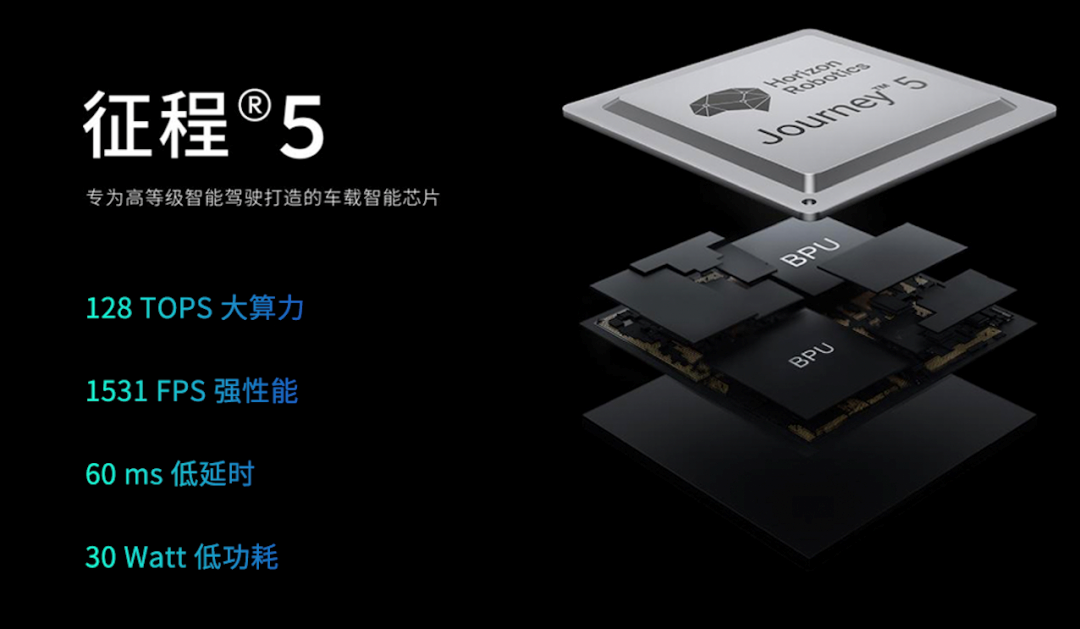
专为高等级智能驾驶打造的征程5
依托贝叶斯深度学习加速引擎,征程5能够高效支持大规模的神经网络计算,可广泛支持各种顶级模型、算子,原生支持BEV感知所大量使用的Transformer模型,能够轻松应对各类BEV感知算法部署。同时,征程5配备了丰富的异构计算资源,如双ISP、CV引擎、双视觉DSP等配置,能够快速、精准地消化多摄像头输入的海量数据,完成畸变校正、拼接、3D场景重构等视觉预处理工作,让整个BEV感知输入过程不存在瓶颈环节。征程5单芯片至多支持16路摄像头感知计算,同时开放支持毫米波雷达、激光雷达等多类传感器的融合感知,具备极高的灵活性,能够满足不同域控方案差异化的传感器配置需求。同时,2个千兆以太网通信接口能够实现亚微秒级的多传感器同步,全面优化传感器间的曝光延迟,更是大幅提升了实时计算效率。
得益于此,在纯视觉的BEV感知方案以外,征程5还可开放支持多传感器融合BEV算法部署。如轻舟智航基于征程5打造的的高阶辅助驾驶解决方案“轻舟乘风”,便是通过在征程5基础上实现视觉、激光雷达的时序多模态特征融合,打造出了极致丝滑的NOA功能体验,该方案现已完成城市NOA实车部署与验证。
轻舟智航基于征程5的“轻舟乘风”高阶辅助驾驶解决方案
高效易用,开放平台加速BEV量产落地
地平线以征程5为核心打造了开放、易用的智能计算开放平台,包括芯片开发套件、域控参考设计、芯片工具链及软件开发平台等,可以为高等级自动驾驶开发部署提供全流程支持。地平线天工开物®工具链秉承地平线一贯的软硬协同理念优化设计,能够帮助开发者充分利用征程5硬件资源,实现BEV感知等领先算法的高效部署,同时提供对各类算法框架与算子的兼容性支持和开放的自定义加速计算能力,以更高的灵活性去支持生态伙伴探索算法创新。
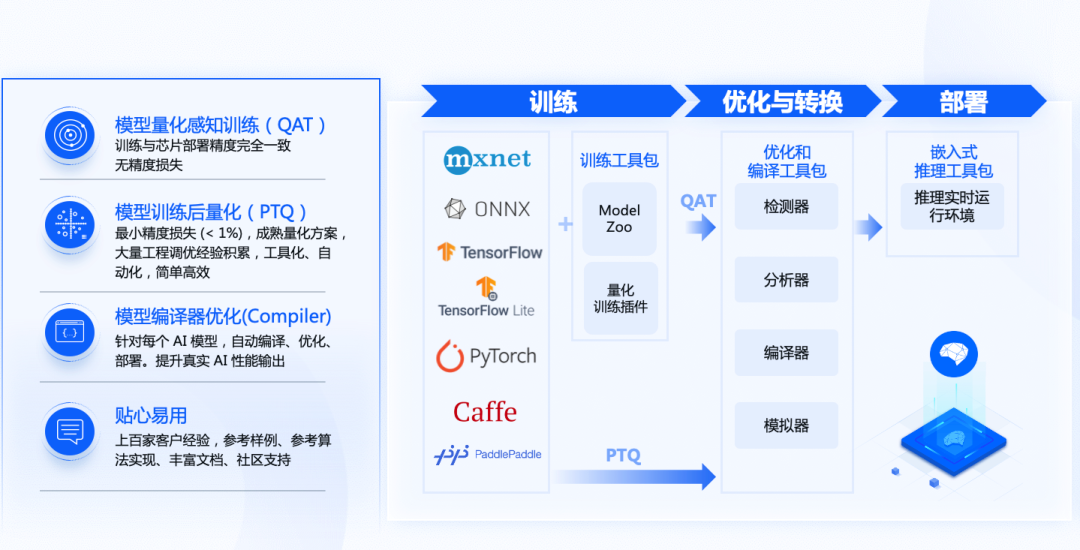
地平线天工开物®工具链
在数据层面,BEV感知效果严重依赖训练的标注数据,地平线所提供的艾迪®开发平台,便能够支撑完整的数据闭环链路,赋能合作伙伴实现从数据采集标注、模型训练优化、仿真评测到模型OTA部署,端到端的数据迭代闭环,并在量产全生命周期内推动BEV算法的迭代效率,让感知能力持续进化,不断提升BEV模型整体的感知质量。
地平线艾迪®云端开发平台
为帮助车企和生态伙伴降低算法开发难度,更高效地完成在征程5上的应用部署,释放极致的计算性能,地平线还推出包含丰富模型示例的参考算法,其中也包括集成了目标检测和语义分割多重任务的BEV视觉感知模型,可开放支持包括IPM、Transformer、LSS等多种转换方式。基于Transformer,更提供了包括DETR 3D、GKT、PETR在内的多类感知示例。
BEV感知动态场景重建
相较于图像,BEV感知提供了一个更加贴近物理世界的空间,不仅为现阶段的感知难题提供了行之有效的解决方案,同时也为自动驾驶未来的发展和跨越带来了更多可能性。软件2.0时代,BEV正逐渐成为高阶自动驾驶落地的主流方案,今年将有多家车企与生态伙伴基于征程5芯片平台,高质量实现基于BEV感知的产品开发与量产落地。未来,地平线将继续坚持“软硬结合”的技术路径,持续搭建软硬高效联动的智能计算开放平台,加速智能驾驶面向全场景的应用落地,持续为消费者提供更安全、更美好的智能出行体验。
参考文献链接
https://mp.weixin.qq.com/s/WGgB69WhPmNpZJq2ViG6cg
https://mp.weixin.qq.com/s/VVaoJM6cFtW7pprSczZ6LQ

