


RISCV-新能源汽车-视觉技术分析
RISCV-新能源汽车-视觉技术分析
参考文献链接
https://mp.weixin.qq.com/s/0O7BFr6Jh1JTuK7d-icRsA
https://mp.weixin.qq.com/s/stmfI5EWY05urFb6ixuD7g
https://mp.weixin.qq.com/s/ZPDICelRn0m9l7Ej5sxtmg
https://mp.weixin.qq.com/s/Te8ANQkXemm0ZHZRZytW4A
https://mp.weixin.qq.com/s/nFfaj-_8oVIdHCHqdvN6Rw
https://mp.weixin.qq.com/s/przorw09qCJhZu7YwbxuFQ
精简指令集集(RISC)处理器
人类历史第一台RISC 电脑,应当是CDC6600,姑且不论IBM 力图自我宣传的立场,IBM 801 研发过程逐步厘清RISC 该有的样貌,也是不争的事实。最起码IBM 801 研发团队明确指出「存储器载入/回存(Load / Store) 架构」与「微码不好(Microcode is bad),不要微码」这些历史性结论。
创造「根据代码流可分成指令(Instruction) 和数据(Data) 两种、据此再分成四种计算机类型(SISD、SIMD、MISD、MIMD)」的「费林分类法」(Flynn′s Taxonomy)的Michael Flynn,认定IBM 801 是世界第一个RISC 系统。IBM 前述ACS 计划累积的成果,如高级语言编译器的最佳化手段和更精练的指令集架构,一并延续到IBM 801。
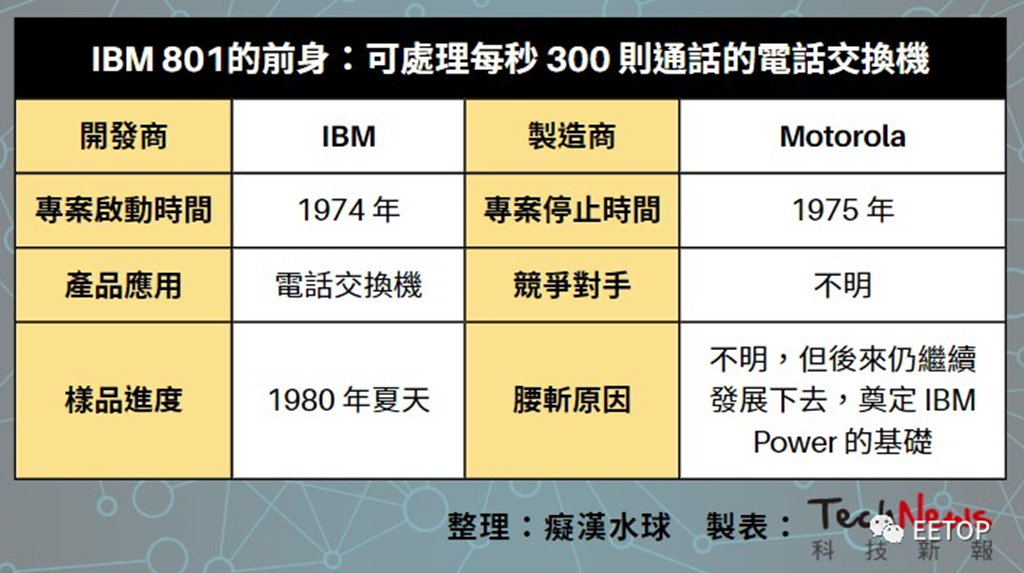
▲ 第一台RISC计算机IBM 801,由IBM 研究员John Cocke 和团队于1970 年代后期设计,他也在1987 年获得计算机工业最高荣誉「图灵奖」。1974 年,IBM 开始研究如何打造每小时处理100 万则通话、平均每秒300 通的电话交换机。假如每通电话须执行2万个指令,代表每秒最少要600 万个指令(6MIPS),再算额外处理负担,起码要1,200 万个指令(12MIPS)。但当时IBM 销售最高端机种System/370 Model 168(1972 年),只有每秒300 万个指令(3MIPS),这说明要出现巨大技术突破,才有实现目标的可能。因此John Cocke 团队删除所有操作存储器内数据的指令,只保留使用处理器内的数据寄存器。相较未有专门指令负责存储器载入(Load) 和存储器回存(Store)的CDC6600,电话交换机研究案直截了当指明RISC 指令集第一个要素:存储器载入(Load)/回存(Store)架构。白话点就是「一次从存储器抓一堆运算元(数据)进来,算完再一次丢回存储器」。IBM 在1975 年取消这计算机结构的概念取得相当进展的实验性专案,但当年10 月IBM 决定当成不同应用可共享的通用设计,继续发展,并以研发部门所在地Thomas J.Watson 研究中心建筑物编号为名,命名为IBM 801 计划。日后IBM 801 普遍用于各种IBM 产品,包括System/370 大型主机I/O 通道控制器、各种IBM 网通设备、IBM 9370 大型主机的垂直微码(Vertical Microcode)执行单元,并在日后成为IBM ROMP(Resarch OPD Micro Processor)微处理器、IBM RT PC 工作站和几个内部研究案的技术基础,一步步迈向时下高端RISC 之王:Power(Performance Optimization With Enhanced RISC)。接着更伟大的成就,就堂堂登场了──John Cocke 团队发现软件编译程序都未用到大多数透过微码(Microcode)实作的功能强大复杂的指令。当时可能一个看起来很简单的加法指令,就有一堆对应不同运算元(像寄存器与存储器配对,或不同运算元数量)版本,就是CISC 的特色,为了提供充裕指令数量与功能(受大型主机影响,是那时很重要的商业行销诉求),反而拖慢常用的简单指令。抛弃微码,使用硬件线路(Hardwired)制作这些指令,并有效流水线化(Pipeline),就是RISC 的第二个特征。

▲ 微码是区分RISC与CISC 的最根本差异,没有之一。即使后来的RISC…...John Cocke 团队总结,这句话也从此颠覆指令集架构潮流:“在计算机与使用者间强加微码(用微码实作「为软件与硬件界面的指令集架构」),会在执行最频繁执行的指令时,产生昂贵的额外负担。”(Imposing microcode between a computer and its users imposes an expensive overhead in performing the most frequently executed instructions.)RISC的重大精神「让最常用的指令跑的更快」(Make The Common Case Fast)由此而生。
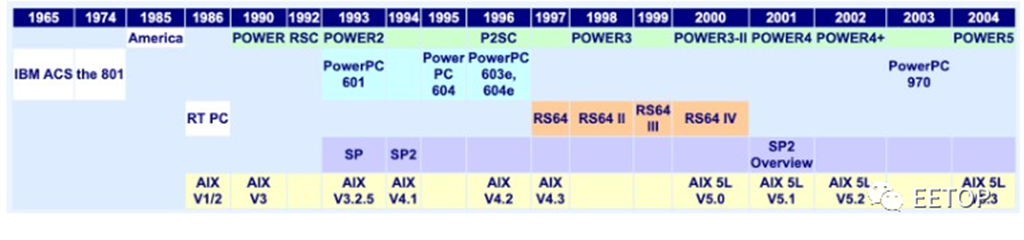
▲ 虽然IBM 并未发明RISC 这名词,但IBM 的801 计划的确早于当代两位大师David Patterson(RISC 名词创造者,之后才出现「对照」用CISC)的RISC I 和John Hennessy 的MIPS。1980 年夏天问世的最初版,时钟频率15.15MHz,理论运算效能高达15MIPS,超出1974 年电话交换机的预定性能需求。但IBM 801 打从娘胎起就是为了功能极有限的系统而生,所以规格也极简单,仅有16 个24 位元数据寄存器,指令编码长度是短短24 位元,没有虚拟存储器,延续古老的2 运算元格式(A = A + B),但2运算元格式(A = A + B) 却会覆盖其中一个,代表必须事先复制一个运算元的数据到另一个寄存器,降低效率。后来IBM 改良多次,特别重要的是将指令编码长度扩展到32 位元,不仅让数据寄存器数量倍增到32 个(用到5 个位元标定),更有足够位元数,改为3 运算元格式(A = B + C),更利于数学应用,因两个数字(B 和C) 都可保留于寄存器,以便重新使用。RISC 第三个象征:「应该」要有32 个数据寄存器和三运算元格式,就这样出现在各位眼前(至于嵌入式导向RISC 指令集,如ARM Thumb,那又是另一个故事了)。更值得注意的是,不限硬件,IBM 801 计划也对改善编译器(Compiler)效率有巨大贡献(各位还记得上一篇ACS 和Frances Allen吗?)。新版IBM 801 于System/370 大型主机以「模拟器」执行时,运行速度竟然会比System/370 原生程式码还快。研发团队将IBM 801「尽其所能利用数据寄存器,并设法减低存取存储器频率」的编译器「逆向」移植回CISC指令集架构的System/370,效能也比原版快三倍,充分证明针对RISC 发展的编译器最佳化技术,也同样可改进CISC 处理器软件执行效能,反正能减少上下其手存储器,都不啻是好事一桩。总之,从CDC6600、ACS 和IBM 801,能对RISC 做以下总结:1.核心精神:让最常用的指令跑更快。2.RISC「精简」的是指令格式与运算元定址模式,不是指令数目。3.存储器载入(Load)回存(Store)都由专属指令负责。4.尽量使用硬件线路(Hardwired)实做指令,避免采用微码(Microcode)产生控制讯号。5.预设最少要有32个数据寄存器与3 运算元(A = B + C)。6.因应高级语言普及,编译器(Compiler)技术在效能层面扮演举足轻重角色。但IBM 801的传奇并未划下句点,更大挑战即将现身John Cocke 等人眼前:1982 年以IBM 801 的成就为地基,IBM 启动Cheetah(猎豹)计划,借实作多组执行单元,让RISC 在单一时脉周期内执行多道指令,也就是同时执行一个以上指令的「超标量」(Superscalar)流水线,结合让RISC抢滩个人电脑市场的努力(ROMP、RT PC、PowerPC),铺陈蓝色巨人横越超过半世纪的壮丽RISC 发展史。
▲ 笔者一直很讨厌RISC-V 阵营老爱把RISC 说得好像横空出世的伟大发明,就算不提IBM,RISC 起源甚至可追溯至1964年的CDC6600,距今超过半个世纪。如果还没忘记上一篇提到的IBM System/360,就会马上理解服务器的世界,无论CISC 还是RISC,最顶端的高端产品,依旧清一色是IBM 天下。
▲ 无预警停机时间排名,足以代替千言万语。不过论世界第一个「兼具超标量、乱序与预测指令执行的RISC 处理器」,一般认定是1990 年IBM Power1(限浮点运算) 或1993 年IBM PowerPC 601,但其实早在1978 年苏联Elbrus-1 实现,只是苏联解体、冷战结束后才逐渐被世人知悉。笔者更好奇的是,当代两位大师合着的两本经典教科书《计算机体系架构:量化研究方法》,何时会探讨俄国人的计算机领域成就?
沉浸式会议
在过去几年间,许多企业和组织已经逐渐习惯了以远程的方式开展协作——混合办公成为了新常态下的一种必然趋势。在这一全新工作模式下,跨空间跨设备的会议成为了组织成员开展团队协作的一种主要的形式。为了帮助线上线下的的员工消除由于地点差异所造成的距离感、提供灵活多样、更加激发创造力的办公体验、加强团队凝聚力,企业管理者需要对会议空间进行重新设计和升级改造,从而打造一个沉浸式的共享空间,赋能每位组织成员在更加愉悦的参会体验中开展无缝团队协作。
那么,企业应该如何对会议空间进行改造?下面让我们依次通过:客户案例分享、全球领先的云会议协同平台及样板空间展示、微软会议解决方案解读三大方面来介绍基于Microsoft Teams Rooms(MTR)的现代化会议理念。
零售食品服务商如何打造现代化会议空间
某零售食品服务商全渠道技术高级总监
首先,让我们通过一个真实的客户案例来直观了解:Microsoft Teams Rooms如何帮助企业打造灵活包容的办公环境、高效一致的员工体验,并轻松实现企业的云加速转型和降本增效。
M公司作为一家全球零售食品服务商,在各地都有很多的线下门店,分公司,并需要和多家供应商进行紧密协作。随着混合办公趋势的到来、跨团队协作和远程办公需求的增多,M公司亟需解决下列问题:如何打造契合混合办公理念的工作文化?如何采用高效方式来开展远程团队协作?如何简化对会议室的IT运维和管理成本?
客户在选择了通过Microsoft Teams Rooms对已有会议室进行整体升级改造和服务优化后,不仅解决了上述问题,更获得了整体办公文化的全面提升。
现在,客户借助Microsoft Teams Rooms的一键入会功能,可以让会议室的所有设备快速启动并加入会议,高清摄像头可以清晰捕捉并聚焦会议室中主要发言人,天花板拾音麦克风可以准确识别会议室中来自不同方位的参会者的发言,线上和线下的参会者就像身处同一个空间,获得就像面对面交流一样的自然体验;团队成员通过在Teams会议中,使用白板、屏幕共享,对于同一个主题开展同步沟通、实时协作,一起推动项目前进;而IT管理员通过Teams后台管理员中心查看会议室设备的状态,并进行智能纠错排查。

▲ 客户需求与微软现代化会议解决方案
该客户认为:采用Microsoft Teams Rooms,员工可以选择使用多种设备随时随地参与会议,同时可以在会议室中与远程同事获得沉浸式的会议体验。这种灵活的工作模式,不仅提高了员工的自由度和满意度,还打造了更加包容的工作文化。
前沿会议空间
微软中国最新会议厅亮点抢先看
通过上述的案例,我们为大家展示了零售食品服务行业当中一个真实使用场景。但这仅仅只是Microsoft Teams Rooms的使用个例,为了帮助大家从多个不同角度阐释Microsoft Teams Rooms如何配合不同类型会议空间来提供针对性解决方案,接下来我们将通过微软技术中心的标准会议室样板间来展示更丰富的应用场景。

▲ 微软技术中心标准会议室样板间
▍微软大型会议室样本间设计方案

▲ 微软大型会议室样本间
对于需要容纳20人以上的大型会议室,由于空间较大,要确保会议中每个人的声音都别能被识别、每个人都能听清发言者的声音,以及看清楚屏幕共享内容、发言时能被线上同事在一群人中看到,其实存在非常大的挑战。
针对这种类型的会议室,建议配置覆盖范围更广的天花板拾音麦克风、在会议室4个角落安装扬声器,以及在会议室前中后分别设立3个显示屏,并安装可以智能聚焦、放大发言者头像的智能高清摄像头。而需要对上述众多设备进行集成管理,还需要有会议管理触控面板。
微软中型会议室样本间设计方案

▲ 微软中型会议室样本间
对于可容纳人数在10-20人的中型会议室,重点在于提供深度沉浸式的会议体验。
通过弧形会议桌和前排模式,可以使线上线下的每个参会者以清晰的正面视角来展示自己并看到其他人;内容摄像头配合物理白板,可以更好地开展线上线下实时同步协作;超短焦距的投影仪和复合式广角拍摄摄像头,提供了高清的视频会议体验。
微软开放会议空间样本间设计方案

▲ 微软开放会议空间样本间
对于开放空间,一方面受到环境条件限制,往往无法放置太多会议设备;另外一方面,由于处于非密闭环境,往往会因为人来人往而面临较多噪声。
通过采用视频会议一体机,能有效应对上述问题——1个设备即可整合Microsoft Teams Rooms控制、摄像、收音、扬声的功能,占用空间小,部署简单;通过声障技术,能智能识别主讲人的声音,并屏蔽指定范围之外的外部噪声的干扰。
引领趋势变革
微软新一代融合通信会议解决方案剖析
通过上述行业客户案例和微软标准会议样板间的介绍,相信大家对于微软现代化融合通讯会议解决方案已经有大致的了解,下面我们将来对这一方案进行系统和深入的介绍。
Microsoft Teams Rooms是基于Teams的会议室系统和配套的解决方案,用于打造一个沉浸式的共享空间,实现多人一起进行线上线下的混合式协作与互动,消除由距离所带来的对远程协作的影响,提供具备包容性、易用性、灵活性和安全性的混合会议体验。
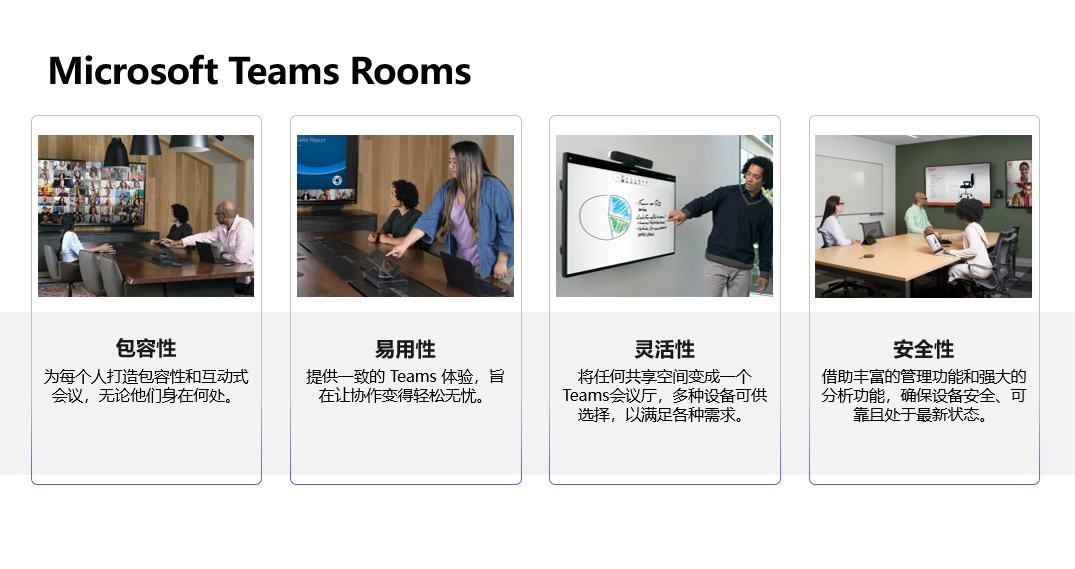
▍包容性:对于会议中只有一个全景摄像头的情况,后排发言者会被前排的参会者挡住;通过开启伴侣模式,会议室中的参会者可以借助PC或者手机端的摄像头,在发言时展示个人的画面,而不用担心被前排发言者挡住。前排模式,可以优化Teams会议的视图布局,让远程参会者的头像在屏幕上出现时,与会议室中的参会者保持双方视线基本对齐,获得接近于面对面沟通的体验。声纹识别和自动转录功能,可以帮助参会者以文字方式识别所有参会者的发言内容,并标记内容对应的发言者。
▍易用性:通过Microsoft Teams Rooms,一方面,参会者可以更加方便地在会议室中加入Teams会议。近场入会功能,在蓝牙打开的状态下,使用手机可以自动识别距离最近的可用会议室,通过在手机点击加入会议,即可让会议室相关设备启动和入会。另一方面,参会者还能通过个人设备对会议室进行管理。当以伴侣模式加入会议时,可以通过包括PC、手机和平板在内的个人设备,对会议室中的音视频装置进行音量控制,控制摄像头或者麦克风的打开和关闭,以及一些画面的切换。
▍灵活性:无论是小型、中型、大型会议室,还是开放空间,Microsoft Teams Rooms都能通过不同类型的屏幕和广泛的认证设备组合满足各种配置的需求。支持多种类型的设备,比如:摄像头、扬声电话、会议室触控面板、Surface Hub等,提供模块化套件、集成设备以及完整的多合一解决方案。适配主流平台,在Windows 和 Android 操作系统上均可使用。
▍安全性:提供微软认证的 Teams 设备内置安全机制,并且可自动更新,使系统默认保持安全状态。通过Teams 管理中心管理 Teams 会议室,进行基础设置、设备管理、监控和安全委派,在一个界面集中管理 Teams 会议设备和相关设置。Teams 会议室的 AI 托管服务,可以进行智能化、自动化的操作管理,提供深度见解以及主动的设备安全配置和更新。
通过以上三部分阐述,我们可以深刻认识到Microsoft Teams Rooms能有效帮助企业实现混合办公下的会议场景创新,加速员工工作模式变革,在满足企业数据安全、办公环境灵活包容、员工体验高效一致的前提下,轻松实现企业的云加速转型和降本增效。
如果还希望了解更多相关资讯,欢迎点击“阅读原文”,观看“Microsoft Teams Rooms:开启全新一代融合通信会议体验——远程交互·智能协作深度融”主题直播精彩回放,获得全面的解读和介绍。
新能源汽车市场
中英携手拓新能源汽车商机 当前,全球道路运输排放量增长迅猛且依然在持续增长,对于加快交通电动化转型步伐、向零排放汽车过渡,中英两国早有共识。本次中英零排放汽车合作与发展论坛,以“中英交通领域碳中和协同发展” 为主题,重点探讨了如何加速交通运输领域的绿色转型,推动两国以及全球碳中和愿景的实现。作为全球首个立法承诺 2050 年实现净零排放的主要经济体,英国走在绿色交通转型的前沿,而中国是全球第一大新能源汽车市场,两国在推进新能源汽车市场发展方面早有共识。今年 6 月,英国商业、能源和产业战略部(BEIS)和中国工业和信息化部(MIIT)首次展开英中产业合作部长级对话,双方承诺成立英中汽车工作组,加强政策和法规交流,推动两国及全球的零排放汽车(ZEV)/新能源汽车(NEV)和智能网联汽车(ICV)的发展。目前,双方正保持紧密对话,积极推进实现该工作组下的合作。在过去几年里,英中双方基于对推动绿色交通转型、实现零碳排放的共识,在新能源汽车市场领域,尤其是产业链相关领域的合作与交流日益深化。
今年 7 月,庄信万丰宣布将在其位于英国罗伊斯顿的现有厂区建造一座价值 8000 万英镑的超级工厂,以进一步扩大氢燃料电池部件的生产规模。该超级工厂最初将能够每年为氢能汽车制造 3GW 的质子交换膜(PEM)燃料电池组件,并由英国政府通过汽车转型基金 (ATF) 提供支持。(图片来自网络)以英国企业庄信万丰为例,该企业位于英国斯温顿的工厂拥有制造燃料电池部件的专业技术,还提供可用于生产绿氢的部件。他们从 2021 年起开始在上海运营其最先进的生产设施,生产氢燃料电池的关键组成部分——膜电极组件(MEA),成为其斯温顿业务的补充。今年 8 月 2 日,庄信万丰又与中国石化集团资本有限公司达成战略合作,并签署合作备忘录,承诺双方合作探索在中国开展绿氢和蓝氢、燃料电池、脱碳技术和循环经济业务的可行性。中国知名汽车企业吉利则是在英国成功投资的代表。2015 年,吉利为 LEVC 打造了英国第一座真正的电动汽车工厂——LEVC 考文垂研发制造中心;2017 年,吉利在中国义乌建设了第二个新能源汽车制造基地——LEVC 义乌研发制造中心;同年6月,吉利收购了英国老牌跑车品牌路特斯(Lotus);2021 年 8 月,武汉路特斯科技有限公司正式成立,并将投入 236 亿元在武汉建设工厂并开发超高端智能纯电动汽车,两国共同成为该品牌发展的“双引擎”核心。2022 年 1 月,路特斯(Lotus)宣布与英国企业 Britishvolt 就共同开发吉利品牌电动跑车的电池达成协议。
LEVC 考文垂安斯蒂工厂是英国过去数年来建立的首个全新汽车生产基地,也是首个电动汽车生产基地。LEVC 致力于研发、生产零排放和超低排放的伦敦出租车及一系列零排放的轻量化电动商用车,为伦敦甚至整个英国和欧洲的城市环保做出了新的贡献。(图片来自网络)
在英国国际贸易部的协助下,除吉利之外的不少中国车企也成功落地英国,并与本土合作伙伴共同发展业务,例如,长安新能源汽车科技有限公司携手英国顶级燃料电池企业 Intelligent Energy 共同研发全功率型燃料电池汽车;远景动力联手日产汽车(Nissan)建设的英国首座动力电池超级工厂;比亚迪与英国巴士制造商合作伙伴亚历山大•丹尼斯(ADL)合力斩获英国 1300 台纯电动大巴订单……从简单投资扩产能的基础合作,到共同研发、快速布局前瞻技术等,英中两国正以超乎想象的速度迈入深层次合作。
聚焦“零碳”未来 英国全面推进绿色交通转型 当前,世界各国都在为应对全球气候变化采取行动。全球公路运输的排放正在以比其他任何部门更快的速度增长。道路运输占全球碳排放量的10% 以上,且这一比例还在增加。为了实现《巴黎协定》的目标,加速绿色交通转型,积极推动低排放和零排放交通系统的发展已是全球共识。
早在2009年,英国便成立了低排放车辆办公室,之后又接连发布了《超低排放汽车发展战略》、《2015 年至 2020 年英国超低排放汽车投资计划》、“低排放巴士计划”等政策,成为了全球绿色交通转型的先行者。近年来,英国更是密集推出了多项政策,从“绿色工业革命 10 点计划”,到连续提前“禁燃”时间表,再到电动汽车战略《零排放之路》和首个《国家氢能战略》,英国为交通电气化按下了快进键。(欢迎阅读 新能源汽车市场动力十足,“零碳”的未来还会远吗?了解更多)
为进一步加快向零碳排车辆转化,英国政府对减碳技术研发及产业化方面给予大量的资金支持,包括总金额高达 10 亿英镑的用于加速未来关键汽车技术和超级电池工厂发展的汽车转型基金(ATF)、超过 10 亿英镑的推进低碳排放技术革新的研发基金、超过 3 亿英镑基金、用于发展动力电池技术的法拉第电池挑战,还有 8 千万英镑用于支持电动汽车动力总成和电子部件研发创新的基金等。在政府的大力支持下,英国企业高歌猛进,表现亮眼。👉 壳牌(Shell)在提供氢气等低碳能源方面颇有建树,近期还与上海申能能创能源发展有限公司合资成立了上海申能壳牌新能源有限公司,计划未来五年内在长江三角洲地区建成 6 到10座加氢站,以打造壳牌在亚洲的首个加氢站网络。👉 作为传统的矿业集团,英美资源集团(Anglo American)正在为满足全球氢能经济而重新设想采矿业,并为电动汽车和所有未来的现代生活提供基本的金属成分——铂系贵金属;目前在储氢和运氢端都在积极与技术拥有方进行合作,为其提供创新的储氢、运氢方式,比如有机液态储氢等新技术。👉 全球知名的工程技术咨询企业——英国公司里卡多(Ricardo)也在加速提升燃料电池的创新能力——2021 年,里卡多宣布与 AFCEnergy plc 合作,专注于氢燃料电池产品和服务的联合开发;不久又宣布将在英国肖勒姆技术中心投资建设一个氢能开发和测试设施,以支持公司在氢气、燃料电池和绿色替代燃料方面的工作。同年 4 月,里卡多宣布在布莱顿大学最先进的发动机开发设施中测试公司创建的氢燃料研究引擎原型,评估发动机的性能、效率和排放,以及其作为未来多缸发动机的可行性,可提供可再生、经济和耐用的技术解决方案,以加速重型卡车、非公路机械和船舶的零碳排放。在全球碳中和的背景下,英国和中国都做出了强有力的承诺,以加快全球向零排放汽车过渡的步伐,两国携手改变汽车行业,推动交通转型,将为所有人建设一个更美好的世界,开启绿色可持续的未来。
新能源MPV扎堆出现
成都车展上,亮相了好几款全新的MPV车型。有气场极其强大的红旗HQ9,有最近预订火爆的腾势D9,还有岚图的第二款车型梦想家。
不得不说,新MPV车型如此扎堆出场,还是非常罕见的。
它们的出现昭示了什么样的趋势呢?让车聚君带大家一起看一下。
1触电+智能+大嘴
腾势D9、梦想家、HQ9,这三款全新MPV的定位都是高端车型,其中定价32.98万元起的腾势D9,已经是三款车中最“便宜”的车型。

▲图片来源:车聚网
腾势D9预售之前,官方曾经发起过一个话题,叫#一台价值过亿的MPV#,号称在设计和研发方面耗费了20个亿。但车聚君从现场看,印象最深的还是它的“大嘴”中网,车身型线极为简洁,依然是典型的MPV设计,并没有太多其他的因素。
在动力系统方面,新车有混动和纯电两种配置。混动版本采用的是比亚迪经典的DM-i系统,两驱版本配170kW电机,四驱版配前170kW+后45kW电机,纯电版本则配的是230kW+45kW电机。系统是比亚迪成熟的系统,电机是三款成熟的电机,电池也依然是刀片电池。
老实说,怎么看都不像花掉了20个亿。

▲图片来源:车聚网
智能进化算是腾势D9这波上新的重点,虽然15.6英寸PAD大屏依然满满的迪味,但比亚迪确实做了一番增配。
新车用上了全球首搭的七屏互联系统,就是除了液晶屏、中控屏、HUD之外,还多了2个中排扶手屏和2个头枕屏,这也算是用屏幕武装到了牙齿。新车还支持导航壁纸双桌面,支持平行视窗,也支持多场景模式和3D控车。
更重要的是,比亚迪这次终于没有“头铁”,车机系统采用了高通778G(SM7325)芯片,后排头枕屏用的是高通625芯片,整体性能相比汉、唐这些车型提升不少,这一点上总算对得住高端定位。
而在智能驾驶方面,新车搭载的是腾势Pilot智能驾驶辅助系统,支持RPA遥控泊车、高速公路拨杆自动变道等等。

▲图片来源:车聚网
相比腾势D9,红旗HQ9的“触电”幅度并不算大,只是在2.0T发动机的基础上加入了一套48V轻混系统,这让它的综合油耗做到了8.8L/100km。
考虑到这是一款车长超过5米2,车宽超过2米的大块头,新车180kW的最大功率和380N·m的峰值扭矩倒不算太出众,9.5秒的百公里加速只能算中规中矩。不过考虑到新车预计会更多用于商务型用途,对于性能没有太大的追求,似乎又在情理之中。
腾势D9、红旗HQ9以及岚图梦想家,三款车都用上了“大嘴”设计。其中红旗HQ9还用上了倾斜度较大的A柱,这让它与传统MPV的型线有所不同,但能一定程度降低风阻。
此外工作人员确定,红旗HQ9后续会推出新能源版本,大概率会命名为E-HQ9。

▲图片来源:车聚网
三款车的定位都非常高端,起步价分别为32.98万、36.99万、40万。而且都非常强调智能配置,除了腾势D9系统升级之外,岚图梦想家也在大力宣传自家的高通8155智能座舱平台,红旗HQ9则用上了激光雷达,可以实现高维度的智能驾驶。
这三款车的出现也点明了当前MPV的发展方向,那就是高端化、智能化、新能源化。
2未来十年看MPV?
过去十年,应该是属于SUV的十年。从最初的CR-V、途观这些合资SUV引进,到哈弗H6横空出世,长安、吉利这些迅速跟进,SUV这个类目焕发出了耀眼的光芒。

▲图片来源:车聚网
SUV能够脱颖而出,最核心的还是整体架构的变化,它可以在不明显增加车长的情况下增大空间。
比如思域和CR-V的对比,两者同样是基于Honda Architecture平台打造,但CR-V占优能提供的实际空间明显更大。举个最简单的例子,对于185的高个子来说,哪怕是豪华的C级轿车,后排也经常容易顶头,但普通的B级SUV就基本不会有这个困扰,这就是先天的优势。
再有就是SUV底盘更高,通过性更好,而且支持后排放倒与后备厢连通,这让它有更好的实用性。甚至SUV的全称本身就是sport utility vehicle,指的是运动型多用途汽车,这就是SUV与轿车的区别。
当然,这里有人就要说了,思域和CR-V根本不是一个价位。但仔细想想,这其实是市场选择的结果。正是因为大家喜欢SUV,才赋予了这种车型更高的溢价能力。
靠着更好的空间利用和多功能性,SUV卷赢了轿车,迎来了自己的黄金十年。如今它们却要迎来新的挑战,那就是MPV车型的降维打击。
相比于SUV,MPV车型的设计理念又大不一样。首先MPV在设计上更加方正,没有那么多曲线和溜背,这让它空间利用率更进一步。其次MPV的车头更短、A柱更加靠前,这让它最大限度留出了后排空间。
我们试乘的红旗HQ9车长为5209mm,比起理想L9还短了9mm,但能明显感觉到前者的二排、三排空间都要更大,配置也更加豪华。
再就是多功能性,以岚图梦想家为例,它的二排座椅拥有70°大角度可调的腿托,还有最大后旋角度155°的靠背,这一点是同级别的SUV车型难以媲美的,再加上本身出色的舒适性,真正可以带来行政级别的乘坐感受,这一点也是同级别的7座SUV比不上的。
SUV厂家总喜欢给消费者灌输这样的思想,7座的第三排只是用来“应急”的,不适合长途乘坐。实际上像GL8这样的MPV,常年第三排用来商务接人,也没有任何问题,这就是MPV架构的先天优势。
从目前的市场反馈来看,MPV车型的热度确实不错。腾势D9在上海地区斩获了近2000台订单,岚图梦想家开启交付后,对于岚图品牌的销量拉升也非常明显。反倒是主打大空间SUV的理想,在刚刚过去的8月份销量雪崩。
在大家为了空间和享受,SUV越买越大的时候,也许MPV车型的优势就要开始展现了。这也是车企们纷纷下重注的原因,未来十年MPV可能会迎来发展的黄金期。
3“触电”是解药?
前面说的都是优点,其实MPV车型也有一些陈年“顽疾”,那就是操控性、能耗以及安全性。因为方方正正的造型,MPV的风阻表现普遍不好。而且由于车身宽大、底盘低,操控性普遍并不出色,而且油耗高。
最致命的,还是MPV车型的发动机舱和行李舱都比较短,这也导致碰撞时溃缩空间相对较小,安全性普遍不及同级别的7座SUV。但“触电”之后,这些问题有望得到解决。
▲图片来源:岚图汽车官网
首先是最致命的安全性,其实现阶段有些MPV已经做得不错,比如丰田赛那就曾经在美国IIHS碰撞测试中取得全五星的评价。这当然不能等同于国产版赛那成绩同样优秀,原因大家懂的,但至少说明全新的TNGA架构对于安全性是有加持的。
而到了新能源时代,这个问题其实更好解决。因为新能源车基本将电池平布在底盘上,车头电机等所需要的空间大幅减少,很多车企都“无聊”到开始做“前备箱”了,留出足够的安全空间自然非常轻松。
再就是设计思路的转变,燃油车发展百年,有太多的习惯性思维难以改变。特斯拉出现后,提出基于专门的新能源架构造车,这种从零出发的设计极大地提升了安全性。别忘了,特斯拉虽然做工惨不忍睹,但在各大碰撞测试中表现可并不拉胯。
当然,这里我们不是说岚图梦想家和腾势D9的安全性就一定好。只是对于厂家来说,理论上切换到电动化架构之后,更容易做好安全性。

▲图片来源:车聚网
然后能耗,新能源车并不惧怕这个,毕竟它们更多的时候是用电。MPV再费电,也无非是使用费用从每公里8分钱涨到每公里9分钱,又有哪个消费者会“怕”这个呢?而且如果真是带着一家人出去玩,新能源MPV还能来一波反向放电,随时化身移动插排,实用性进一步增强。
再有就是,电机天生工作静谧,并且加速绝对线性,这些也完美吻合MPV车型追求舒适性的特点。让MPV“带电”,可以说是天作之合。

▲图片来源:车聚网
至于智能化和“大嘴”,其实并不是新能源车所独有。很大程度还是因为国人对这两个方面格外偏好,厂家也是投其所好。
之前看一个美国博主说车,他说如果一辆车的中网很复杂、很大,那它很大概率会是一辆中国车。虽然老外的视角比较特别,但车聚君在脑海里拼命搜索了一番,自己也觉得哭笑不得。
车聚小结
相比现在流行的SUV车型,MPV的优势非常明显,那就是空间更大、舒适性更好。尤其是对于中产及以上家庭来说,二胎三代出行需要更舒适的座驾,7座SUV几乎无法满足,这时候MPV的优势会进一步彰显。
而MPV车型一些过往的问题,随着电动化的深入,都可以得到比较妥善的解决,相当于扬长避短。
预计未来5到10年,新能源MPV会迎来一个爆发期,就像10年前的SUV一样。车企们已经开始布局了,大家的消费取向会跟上吗?
智能底盘技术
根据制动执行机构的不同,线控制动系统(Brake-By-Wire)可以分为液压式线控制动系统(Electro-Hydraulic Brake, EHB)和机械式线控制动系统(Electro-Mechanical
Brake, EMB)。其中,EHB 以传统的液压制动系统为基础,用电子器件替代了部分机械部件的功能,使用制动液作为动力传递媒介,同时具备液压备份制动系统,是目前的主流技术方案。而EHB根据集成度的高低,EHB 可以分为Two-box
和One-box 两种技术方案。
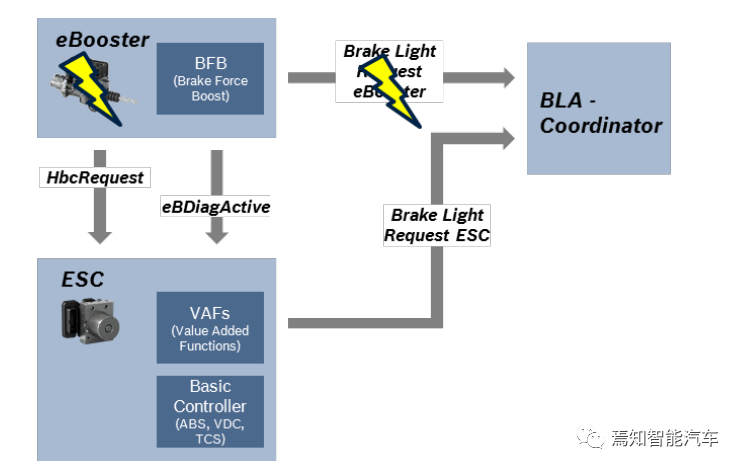
随着新能源汽车市场的扩张,“eBooster+ ESC”组合成为了目前市场上最主流的Two-box方案。该方案除了实现基础的制动助力功能和稳定性控制功能外,还能在实现制动能量回收的同时协调配合,保证在电制动和液压制动的切换中实现驾驶员的踏板感一致。此外,随着高阶辅助驾驶系统和自动泊车系统的普及,“eBooster+ ESC”在其中也扮演着实现制动冗余的角色。驾驶员制动控制
- 外部ECU制动控制
- 制动灯控制
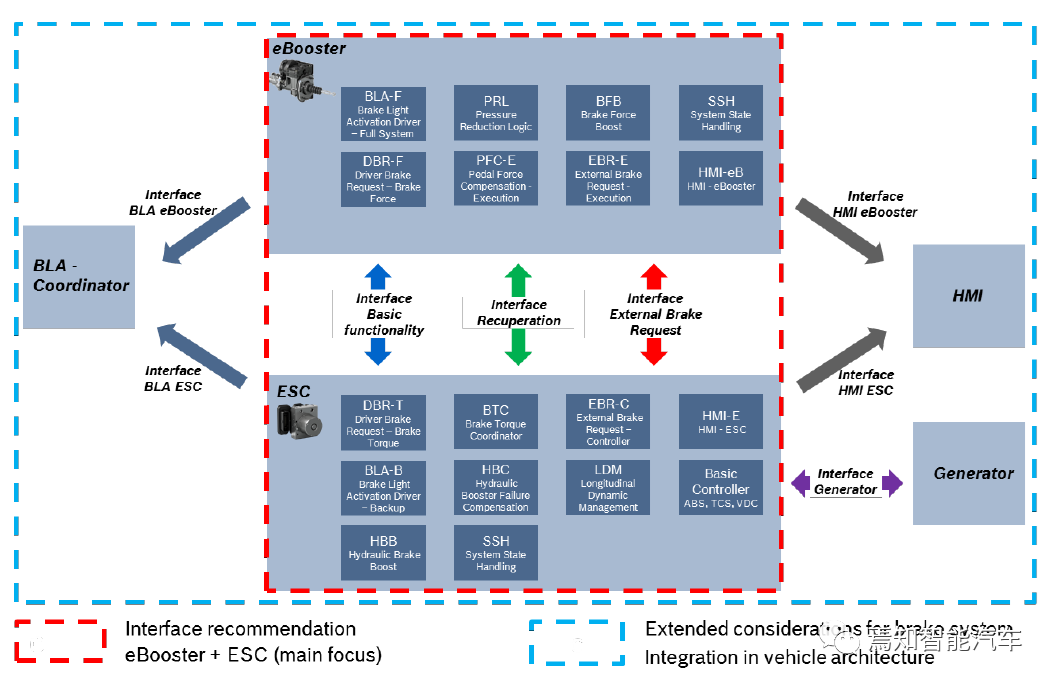
eBooster和ESC的Two-box方案系统架构
1.驾驶员制动控制
eBooster为实现驾驶员制动助力功能,首先需要正确探测驾驶员的制动意图,安装在eBooster推杆处的踏板行程传感器 (Pedal Travel Sensor) 监测驾驶员踩下踏板的深度,从而反馈给eBooster的DBR-F(Driver Brake Request-Brake
Force)模块进行驾驶员意图判断。

ESC+eBooster驾驶员制动控制功能示意图
确定驾驶员制动意图后,eBooster并不进行直接助力,而是将驾驶员制动意图通过网络通讯反馈给ESC,由ESC来进行液压制动力和驱动电机制动力分配。
作为车辆稳定控制系统,ESC进行制动力分配的主要目的是确保分配不会引起车辆失稳的风险,比如当驾驶员遇到猛踩油门的工况而引起车轮抱死时,ESC系统会在激活ABS的同时停止对驱动电机的制动力请求,转而全力通过调节轮缸液压来实现稳定。
其次,ESC进行制动力分配可以实现制动能量回收功能。制动能量回收功能随着新能源汽车的普及同步问世。在制动能量回收功能的作用下,汽车制动过程中除了液压力产生摩擦制动外,高压电池和驱动电机的协作,驱动电机产生负扭矩提供部分制动力,负扭矩产生反向电流对高压电池进行充电,最终制动时车辆的部分动能转化为化学能存储在高压电池中,用于下一次的车辆驱动,从而实现了能量回收,达到节能减排的目的。

ESC液压管路示意图
为实现制动力分配,首先需要ESC的硬件能够解除主缸制动液和轮缸制动液的“直接关联”,这由ESC大容量的蓄能器以及对轮端电磁阀控制实现。在大容量蓄能器的加持下,当驾驶员踩下制动踏板时,eBooster控制主缸液压进入轮缸产生制动力,于此同时驱动电机制动力随着制动踏板深度增加缓慢上升,该过程中来自主缸的制动液不会直接流入轮缸,而是将一部分暂时存储在蓄能器中,在蓄能器中的制动液不会产生制动力,由此实现制动过程中电机制动力与液压制动力的动态协调控制。
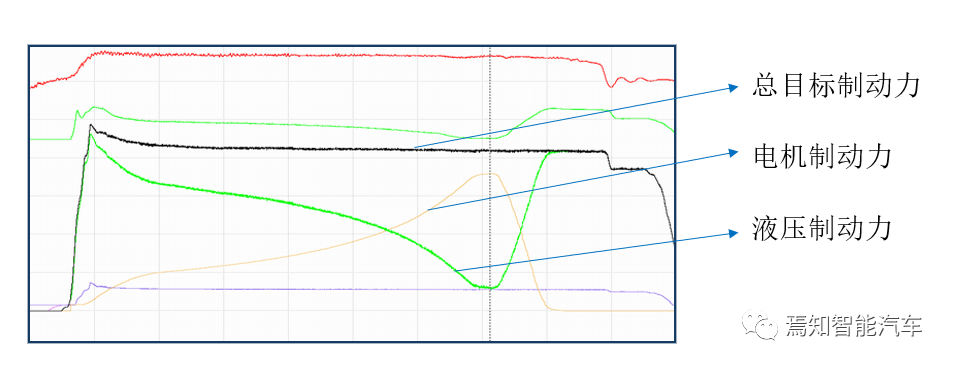
ESC制动力分配示意图
但是,ESC制动力动态分配过程中造成的主缸制动液和轮缸制动液的“分离”,会带来驾驶员制动踏板感变化的问题。eBooster的PFC(Pedal Force Compensation)模块可以实现保证踏板感一致,其核心原理是在驾驶员制动过程中,eBooster通过对助力大小进行控制(如下图所示),始终保证在相同的踏板深度下,反馈到驾驶员脚上的踏板的反作用力恒定,让驾驶员感受不出此时是电机制动还是制动液制动,从而实现踏板感的一致性,给驾驶员带来最舒适的体验。

eBooster实现制动能量回收时保持踏板感一致的原理
上图中,弹簧力Fsprings是恒定的,为了在某个踏板深度下实现踏板力Fpedal的恒定,PFC模块需要知道当前液压能产生的制动力Fhydraulic的大小,从而调节适当的助力Fboost。而此时由于受到制动力分配过程中蓄能器液量控制和轮端电磁阀控制的影响,ESC系统中的主缸压力传感器采集的主缸压力值无法对应真正产生的液压制动力上,所以ESC需要发送一个“虚拟”的主缸压力值给eBooster以确定Fhydraulic的大小。虚拟的主缸压力值由ESC的DBR-T(Driver Brake Request-Brake Torque)模块中的事先标定好的pv曲线查表得到,并通过通讯反馈给eBooster的PFC模块,以此确定为实现目标踏板感而需要助力电机输出的助力大小。
2.外部ECU制动控制
由于eBooster建压的动态响应速度比ESC主动建压更快,且NVH表现更好,因此eBooster是外部ECU(如ADAS ECU)请求制动系统制动时的主执行机构,这样一来也可以减少ESC系统整个生命周期中主动建压的负荷。
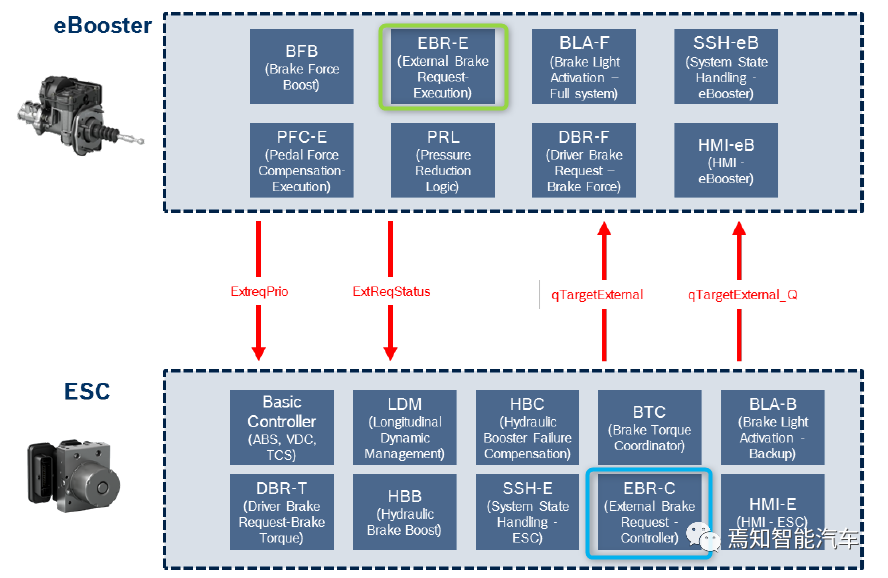
eBooster+ESC实现EBR (External Brake Request)
在ESC中的EBR-C(External Brake Request-Controller)模块负责接收来自外部ECU的制动请求,并将制动请求转换成目标主缸压力值通过通讯网络发送给eBooster中的EBR-E(External Brake Request-Execution)模块,进而eBooster计算目标助力值实现制动请求。
在这个过程中,eBooster也会实时反馈实际输出的压力值给ESC。比如当eBooster达到Runout点后助力能力显著下降(见下图)时,ESC通过主动建压进行制动补偿。
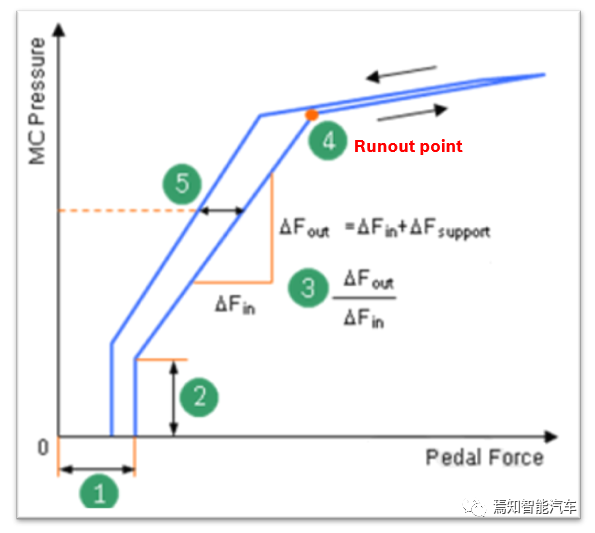
eBooster runout point,图片来自网络
下表总结了实现外部ECU制动时ESC和eBooster的主要交互信号及目的。
|
Interface |
Communication path |
Task and interface content |
|
ExtReqPrio |
eBooster → ESC |
Communication of the information on whether the driver or the external brake request dominates the current brake torque
|
|
ExtReqStatus |
eBooster → ESC |
Communication of the current availability of the external brake request as actuator function
|
|
qTargetExternal |
ESC →eBooster |
Communication of the target value for carrying out the external brake request in the eBooster |
|
qTargetExternal_Q |
ESC →eBooster |
Communication of the current activation request for carrying out the external brake request in the eBooster
|
3.制动灯控制
制动灯控制的策略和eBooster系统的降级状态相关。
当eBooster处于全功能时,由eBooster系统根据驾驶员踩踏板的状态控制制动灯,此时ESC只有当稳定性功能或者不依赖驾驶员制动的辅助功能激活主动建压时才会请求点亮制动灯。

eBooster 全功能时的制动灯控制
当eBooster助力功能失效时,eBooster请求HBC功能激活,此时驾驶员的制动请求由ESC主动建压实现,此时所有工况下的制动灯全权由ESC控制,包括驾驶员制动工况和稳定性功能及辅助功能主动建压的工况。
eBooster功能降级时的制动灯控制
工业现场相机坐标系和机械手坐标系的标定
工业现场使用视觉时一般需要相机坐标系和机械手臂坐标系的转化,这里介绍一种比较简单的标定方案。没有使用到标定板。经过几个项目的测试,精度还算可以,如果要求高精度的场合,就用标定板标定吧!
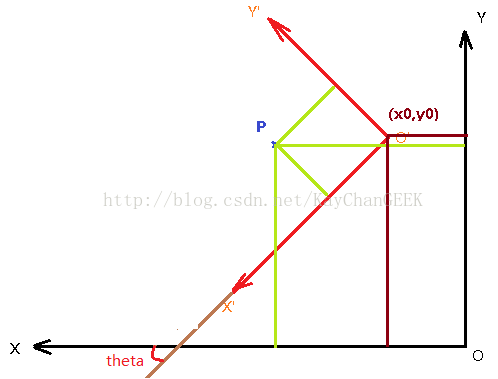
如上图所示:OXY为机械手坐标系,O'X'Y'为相机坐标系。theta为两个坐标系之间的夹角。假设P点在图像上的位置如图,则P在机械手坐标系有一个坐标,在图像坐标系也有一个坐标。我们要做的工作就是图像上的任意一点都可以转化为机械手坐标系上的坐标点:P(Machine) = f(P(Image))。接下来介绍如何找到这个关系。
OXY为机械手坐标系 O'X'Y'为相机坐标系从上图可以看出坐标转化关系:
x = x' * r * cos(theta) - y' * r * sin(theta) + x0;
y = x' * r * sin(theta) + y' * r * cos(theta) + y0;
其中r是毫米像素比、(mm/pixel)就是一个毫米有几个像素,theta为两个坐标系之间的夹角,(x0,y0)为图像坐标原点到机械坐标原点的距离。
简化抽象公式,假设:
a = r * cos(theta);
b = r * sin(theta);
c = x0;
d = y0;
得到:
x = x' * a - y' * b + c;
y = x' * b + y' * a + d;
很显然,要解出这个方程,需要两组对应关系,就是两组对应的坐标点。设两组坐标点,如下:
第一组:图像坐标点:(xImage1,yImage1) 对应的机械坐标点:(xMachine1,yMachine1)
第二组:图像坐标点:(xImage2,yImage2) 对应的机械坐标点:(xMachine2,yMachine2)
则可以解出a ,b, c, d。如下:
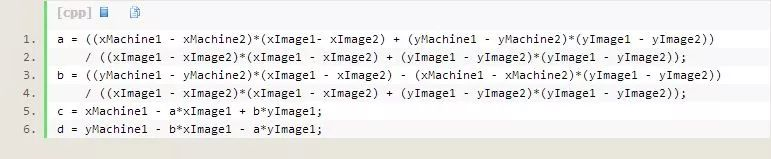
所以,就得出了图像上任意一点的像素坐标转成机械手坐标的关系。
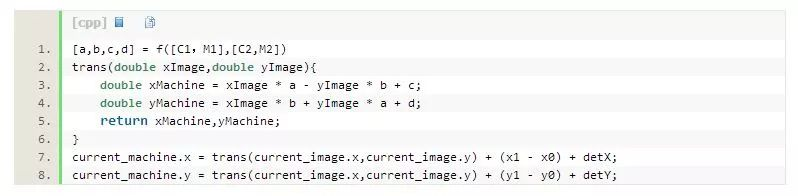
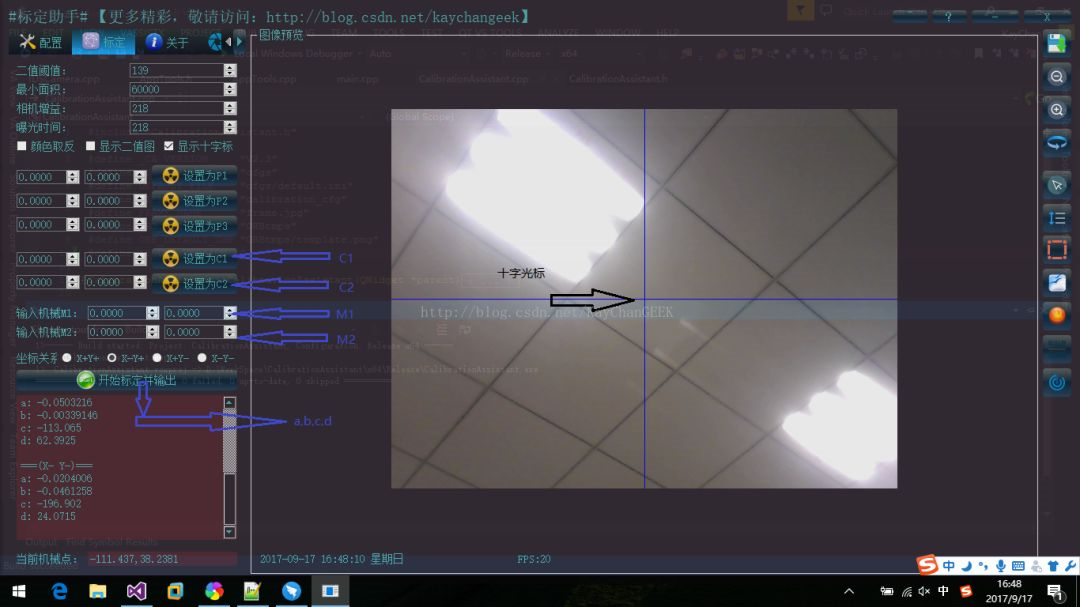
以下是我写的一个求解a ,b, c, d软件:
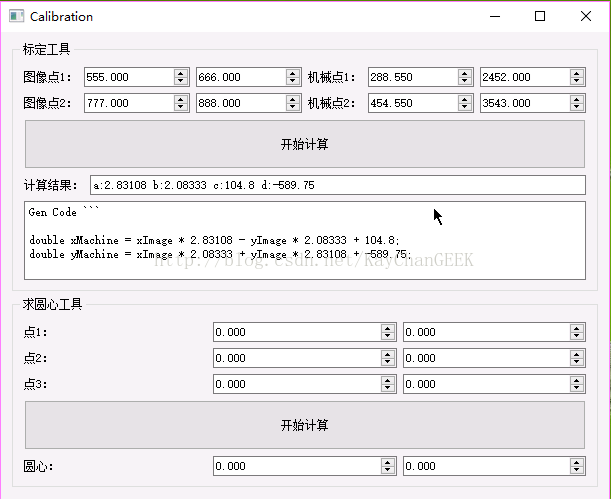
下面举个栗子说明一下操作吧!这是我实际项目中的机械手和相机布局情况,画图真T``M`累!,如下图:
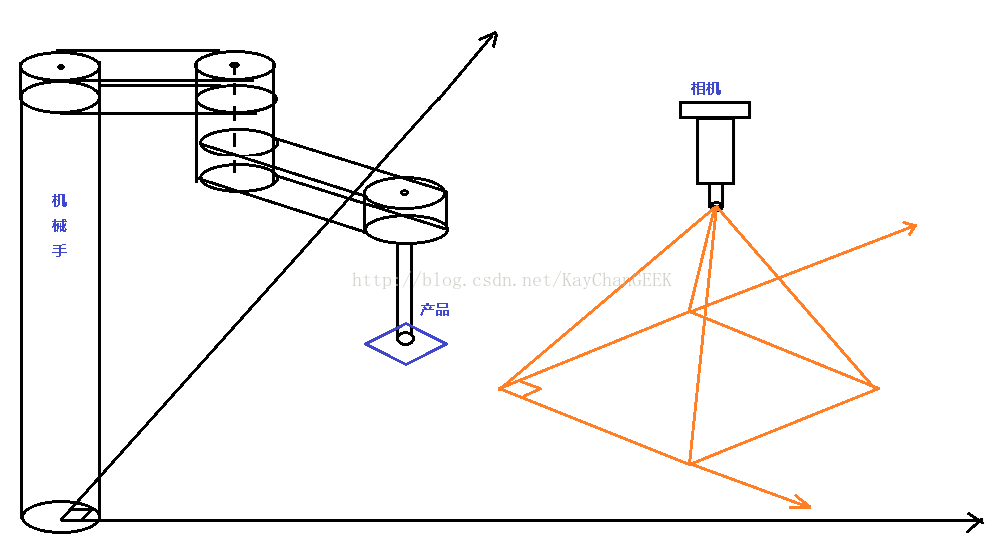
首先将产品上的目标点搞到机械手的Z轴的中心,然后移动到相机视野范围内,让识别产品上的目标点,这时,你会读到一组机械手坐标(也就是上面所说的(xMachine1,yMachine1)),和一组相机坐标(也就是上面所说的(xImage1,yImage1)),再在相机视野范围内移动机械手,就可以得到第二组数据(xMachine2,yMachine2)和(xImage2,yImage2),写入标定软件就可以求出a, b, c, d。就求出了图像上任意一点对应的机械坐标,然后你下次移动第二个产品到相机视野时,首先识别目标点的像素坐标,经过对应的转换就可以得出机械坐标,然后进行相应的偏移即可实现你想要的操作!
当然,有些时候,实际现场并没有如你所愿,现在出现一种情况就是以机械手自带的Z轴无法移动到视野中去,这样就无法进行上面的操作了,系不系!这也是我遇到的情况,SO,我的解决方案如下:先上示意图:
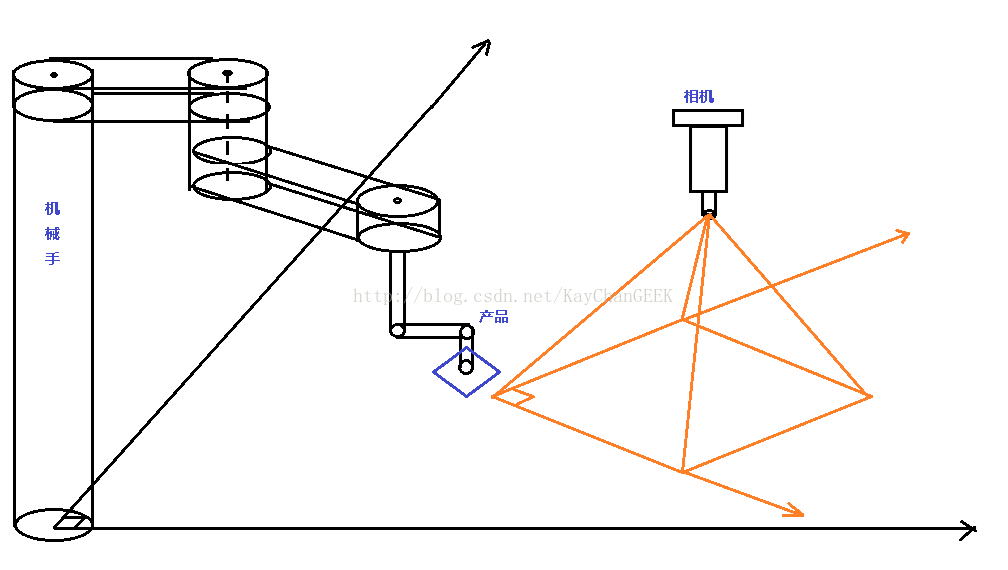
如图,就是在机械手Z轴的横杆上加上一个横条,使得产品可以移动到视野范围内。然后进行上面的操作,虽然现在可以将产品移动到视野范围内了,但是你会发现此时机械手的坐标并不是产品的坐标,因为他们之间隔着一个横条,那我们要怎么换算过来呢!
首先,我们可以这么假定的认为,他们是机械手的坐标就是产品的坐标,然后就可以用上面取两组对应点的方法求出图像上每个点的机械坐标了,但是,此时的机械坐标并不是真正的机械坐标,但是,我们可以利用这些坐标找出机械手U轴的旋转中心就是Z轴(就是实际机械坐标所在的位置)在我们所建立的不是真正的机械坐标系中的坐标。是不是有点不好理解,我也不大清楚怎么描述!求U轴的旋转中心的过程如下:上图:
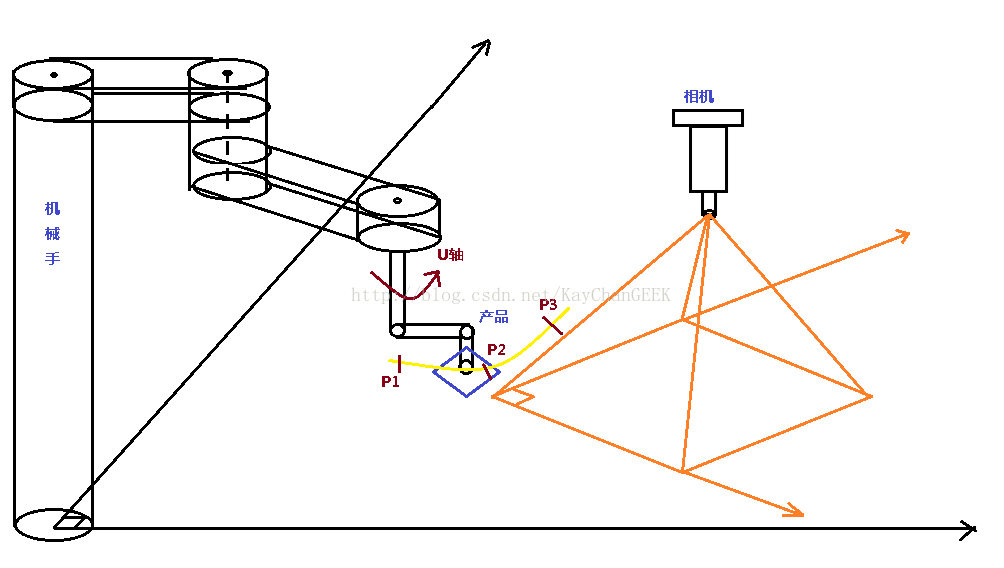
如图:将产品的目标点绕机械手的U轴的旋转中心旋转得到3的目标点的不是真正的机械坐标系的坐标P1,P2,P3,必须让每次旋转的目标点在视野范围内,然后通过圆弧上的3点就可以求得圆心。此时的圆心坐标为不是真正的机械坐标系的坐标。然后我们就可以求出产品中心和机械手U轴旋转中心的deltaX,deltaY,然后就可以结合真正的机械坐标系建立工件坐标系,要对机械手有些了解才比较好理解这些拗口的话!然后对于每一个新的产品都可以建立合适的工件坐标系,然后进行补正和一些操作!
相机跟随着机械手运动(它们绑定在一起了),如果还将标定靶标也固定在机械手上的话,三个对象都相对运动,就无法标定了!那要怎么利用标定助手完成标定呢?经过思考,我给出了以下标定思路:
整个标定系统的初始状态
相机和机械手绑定在一起并且机械手旋转中心处于机械原点,这时候相机中心和机械手中心有一个相对的偏移并且是固定的(相机中心和机械手旋转中心的相对距离设为(detX,detY)),将标定靶标放置在工作区域(实际机械手的工作区域)中的合适位置。
第一步:求取第一组图像点坐标C1
移动机械手(相机会跟着移动)到相机能够清晰拍摄到标定靶标的位置(设该位置的机械坐标为(x0,y0))。然后调整标定靶标的识别参数,使得能够实时的识别标定靶标的中心位置,手动移动靶标最好让它远离图像中心,越远越好(精度越高)但是不能超出相机的视野范围,我就把靶标放在相机视野的左上角的区域吧,然后我们识别当前靶标的图像位置C1,就是第一组数据的图像点。
第二步:求取第一组机械点坐标M1
进入“标定”选项卡,勾选“显示十字标”,这时候会在实时图像中间显示一个蓝色的十字光标,然后,慢速移动机械手,直到C1点和十字光标的交点重合(也就是说移动机械手让实时识别到的靶标中心坐标处于图像的中心,比如采集的图像为2048*1536大小的,你需要缓慢移动机械手(靶标保持不动)直到靶标的中心处于(1024,768)的这个位置),然后记下当前的机械手坐标也就是第一组数据的机械点M1(注意:此时实际是让相机中心和靶标中心重合,并非机械手旋转中心和靶标中心重合,它们之间差了一个detX,detY的距离,具体怎么换算,等下再说)。
第三步:求取第二组图像点坐标C2
将机械手移动回到初始的工作坐标点(x0,y0),将靶标放在相机视野的右下角的区域,识别当前的靶标图像坐标C2,就是第二组数据的图像点。
第四步:求取第二组机械点坐标M2
同理,慢速移动机械手,直到C2点和十字光标的交点重合(就是移动机械手让实时识别到的靶标中心坐标处于图像的中心),然后记下当前的机械手坐标也就是第二组数据的机械点M2。
第五步:求取整个机械手工作区域坐标系和相机坐标系的对应关系
不知道你有没有发现,上面求得工作区域只对工作区域(x0,y0)开始到相机视野结束的位置有效(比如你在机械手移动到工作区域(x0,y0)为起点的位置识别靶标的图像位置坐标为(100,100),但是你将机械手移动到工作区域(x1,y1)为起点的位置识别靶标的图像位置坐标也可能为(100,100))。这样换算过来的机械坐标就是错误的,其实我们上面求得是小区域的转换关系,那我们要怎么扩展到整个机械手的工作区域呢?我们只需要这样做:在机械手工作的时候是可以知道自己在哪里的,比如:现在机械手移动到工作区域(x1,y1)为起点的位置识别靶标的图像位置坐标为(100,100),我们将(100,100)代入转换关系trans得出来的机械坐标是对应(x0,y0)的,要转换到对应(x1,y1)的只需要将换算处理的坐标加上(x1 - x0,y1 - y0)即可!抽象的公式如下:

其中trans函数就是将图像坐标转换为相对于(x0,y0)工作区域的机械坐标,再加上坐标(x1 - x0,y1 - y0)就是当前正确的机械坐标。到此,我们得到了图像坐标和整个机械手工作区域的坐标的关系,但是此时的机械坐标指的是相机的中心,并不是机械手的旋转中心。
第六步:将相机中心转换为机械手的旋转中心
首先,你可以利用目测法,游标卡尺法等等粗略的算出detX,detY的值,然后,进行实时识别和移动测试进行细调,因为粗略的估算有误差,你可以经过多次微调直到精确到机械手的旋转中心移动到产品的上方就成功了。记下此时的detX,detY,代入以下公式就可以算出了最终的机械手应该去的地方了。最终的换算公式如下:

整个过程的伪代码运算过程如下:
利用标定助手求取[a,b,c,d]外参矩阵的输入参数[C1,M1]和[C2,M2]的操作方法如下图所示:
来源:https://blog.csdn.net/KayChanGEEK/article/details/73878994
参考文献链接
https://mp.weixin.qq.com/s/0O7BFr6Jh1JTuK7d-icRsA
https://mp.weixin.qq.com/s/stmfI5EWY05urFb6ixuD7g
https://mp.weixin.qq.com/s/ZPDICelRn0m9l7Ej5sxtmg
https://mp.weixin.qq.com/s/Te8ANQkXemm0ZHZRZytW4A
https://mp.weixin.qq.com/s/nFfaj-_8oVIdHCHqdvN6Rw
https://mp.weixin.qq.com/s/przorw09qCJhZu7YwbxuFQ

