
EPS电动转向系统分析
EPS电动转向系统分析
参考文献链接
https://mp.weixin.qq.com/s/YXQuSlE0s-nrcGlRknK43g
https://mp.weixin.qq.com/s/gr0kfRzgBXnyxLYBJ8g0Hg
https://mp.weixin.qq.com/s/YdW1Zjdfviz45DmWUh_6Ag
EPS传感器类型及工作原理浅析
传感器概述
国标GB7665-87对传感器的定义是:“能感受规定的被测量件并按照一定的规律(数学函数法则)转换成可用信号的器件或装置,通常由敏感元件和转换元件组成”。
电动转向系统(以下简称:EPS)的基本工作原理:当汽车转向时,传感器会检测到转向盘的力矩(和角度),信号通过数据总线发给电子控制单元,电子控制单元根据转向盘的转动力矩、拟转动的方向以及车辆速度等数据信号,向电动机控制器发出动作指令,从而电动机就会根据具体的需要输出相应大小的转动力矩来产生助动力,传感器是EPS不可或缺的一部分。

EPS控制简要原理图
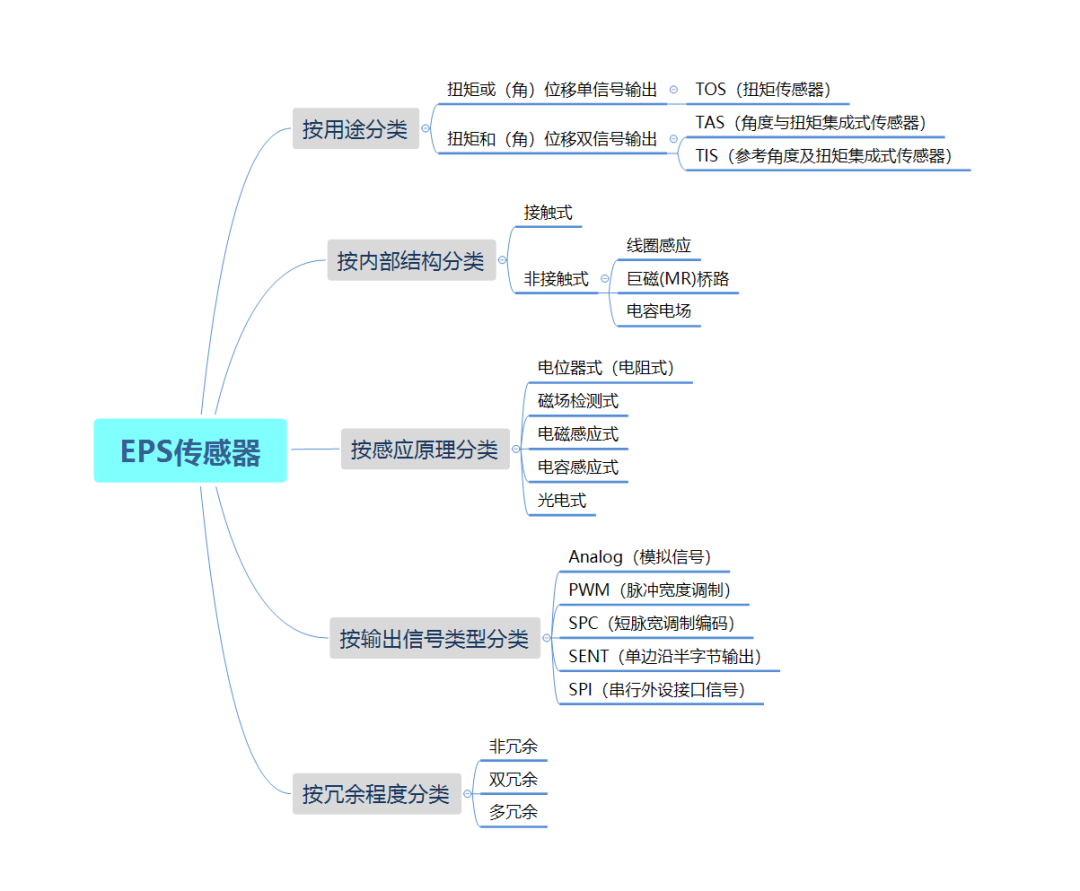
EPS传感器分类
工作原理
3.1、扭矩测量:
通常扭矩的测量是当方向盘存在转向力矩时,扭杆发生刚度变形,扭杆的上下两个部分形成角度差,基于不同原理,可将角度差转换为相应的变量,随后对该变量进行检测、计算转换,最终供ECU使用;
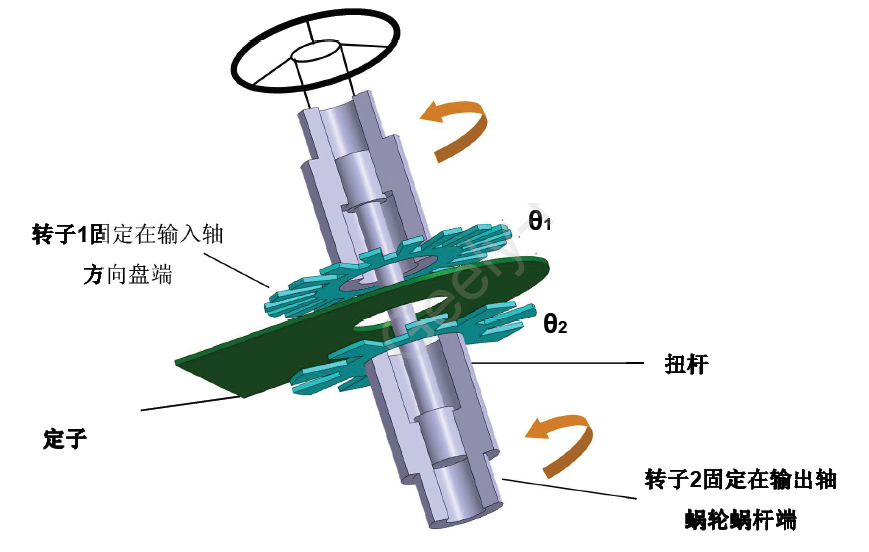
扭矩测量--角度差分结构
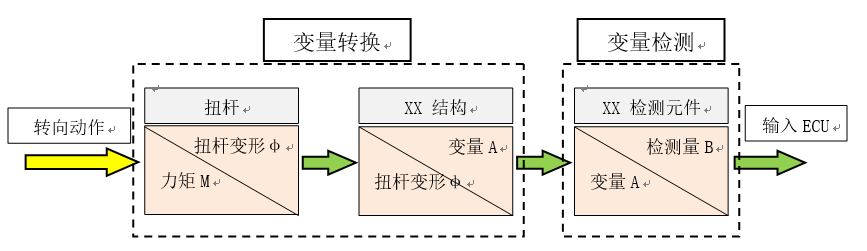
扭矩测量--角度差分检测机制
基于不同的检测原理,可分为以下5种形式:
①电位器式(接触式)
②磁场检测原理式(扭杆变形量φ转换为磁通量B)
③电磁感应原理式(扭杆变形量φ转换为感应系数L/M)
④电容感应原理式(扭杆变形量φ转换为电容量C)
⑤光电式
3.2、角度测量:
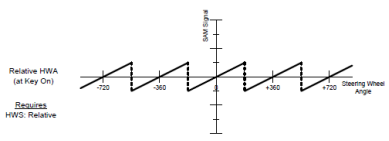
3.2.1、相对位置角度信号
可通过TOS传感器直接输出方向盘转角信号,但由于测量范围只有360°(不同产品,测量范围甚至更小),无法识别方向盘转过的圈数,只是一个相对位置角度信号;
3.2.2、绝对位置角度信号
在TOS传感器基础上增加对比信号,主信号与对比信号存在一定的相位差(可通过设置主副信号传递结构的传动比实现),对主副信号进行处理后可获取测量范围大于360°的绝对位置角度信号,通常处理后的信号测量范围为主副信号周期的最小公倍数;
按照对比信号的不同可分为以下2种:
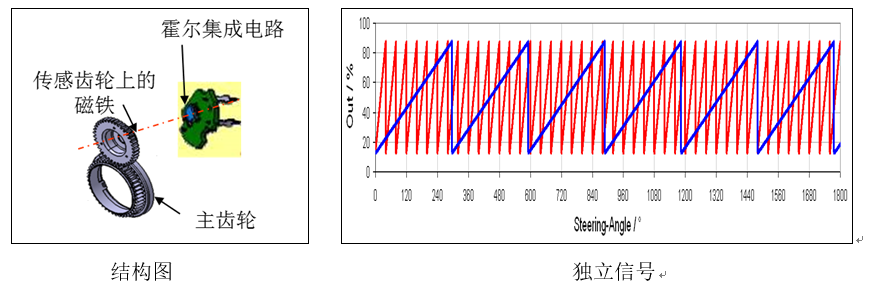
①单副齿轮式:在TOS主齿轮旁增加一个副齿轮,主副齿轮输出的角度信号经MCU处理后获取一组绝对位置角度信号;
对两组独立信号处理后获取的绝对位置信号:

②双副齿轮式:在TOS主齿轮旁增加一组副齿轮,两个副齿轮输出的角度信号经MCU处理后获取一组绝对位置角度信号;
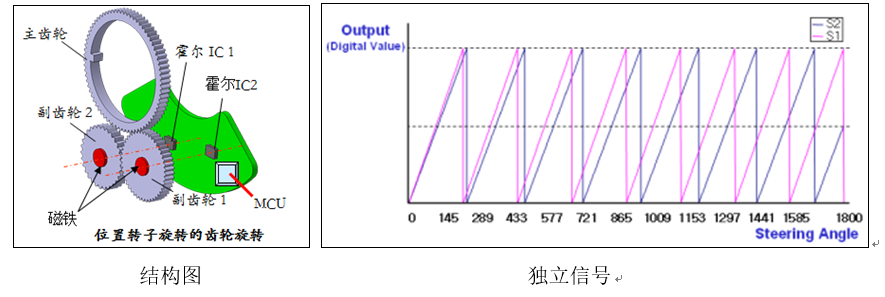
对两组独立信号处理后获取的绝对位置信号:
冗余式传感器技术简介
基于测量原理不变的情况下,通过增加检测芯片的数量,以实现多路扭矩和角度信号的输出,提升传感器信号的整体功能安全等级,进而实现EPS系统的功能安全机制的扩展性;
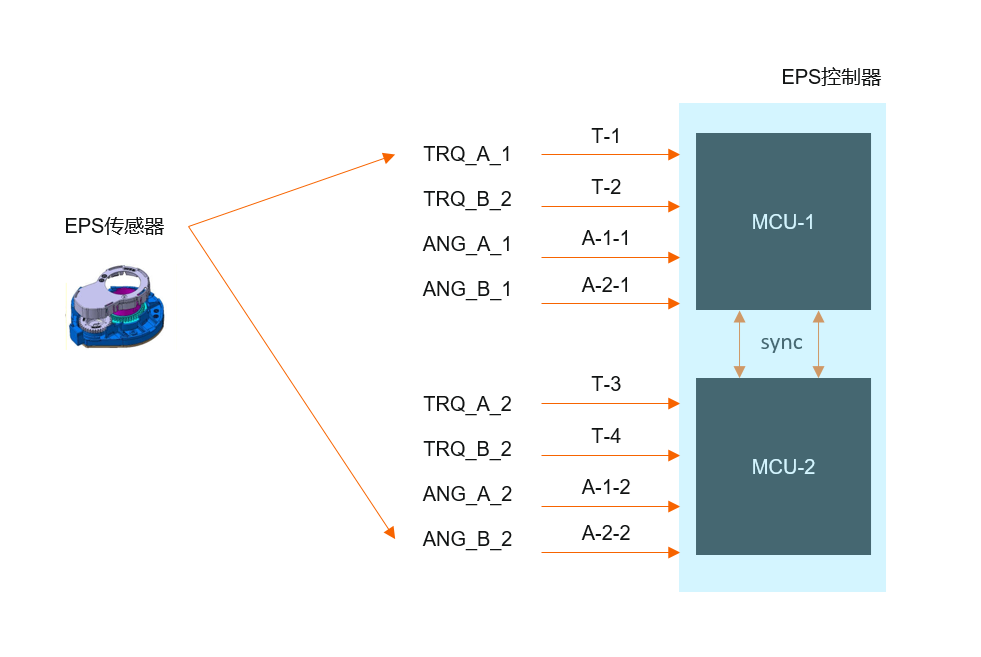
EPS传感器信号冗余
随着汽车智能驾驶的飞速发展,高等级的智能驾驶功能应用的愈发普遍,作为汽车智能系统中的一员,EPS系统也在不断的进化以期达到更高等级的功能安全;基于EPS系统功能安全目标分解:传感器的冗余设计是达成目标的必要环节,包括扭矩信号的冗余与角度信号的冗余,多冗余形式传感器产品的出现从不同维度扩展了EPS系统的功能安全机制的选择;基于不同冗余的传感器技术,EPS系统在出现单点失效后,可以实现limp aside,limp home,fail operation等不同方式的安全处理机制,为客户带来更安全的驾驶环境。
电动助力转向系统扭矩传感器浅析
电动助力转向系统英文全称 Electronic Power Steering,简称 EPS。EPS 是在机械转向系统的基础上,根据输入信号,通过电子控制装置使电机产生相应大小和方向的辅 助力,协助驾驶员进行转向操作,并获得最佳转向特性的伺服系统。
一般来说,电动助力转向系统的基本策 略如图 1 所示,可见其所有基本控制模块均 需要输入方向盘力矩信号。 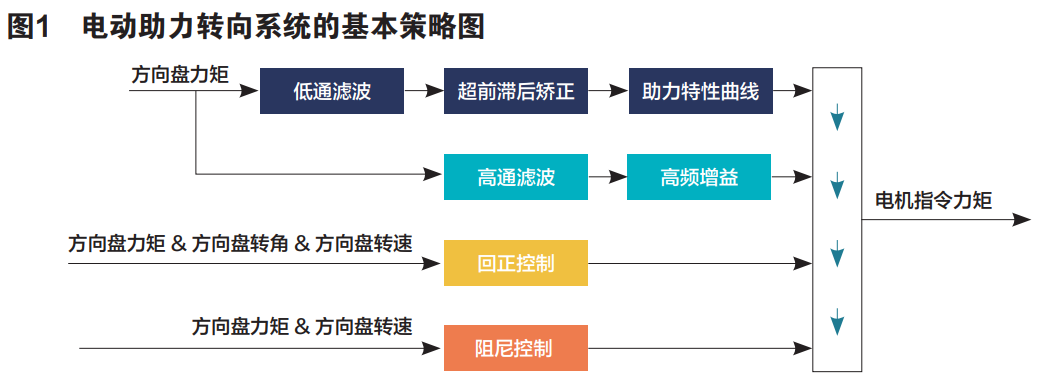
方向盘力矩信号是通过扭矩传感器来获取。本文将对应用于电动助力转向系统的扭 矩传感器的分类、工作原理、性能指标及系统匹配展开阐述。
1、扭矩传感器概述传感器是根据规定的被测量的大小,定量提供有用的电输出信号的部件,狭义来讲, 传感器就是把光、时间、电、温度、压力及气体等的物理化学量转换成电信号的变换器。 应用于电动助力转向系统的扭矩传感器就是通过特定的敏感元件,将转矩物理量转 换成电信号,并集成有信号处理电路的变换器,如图 2 所示。 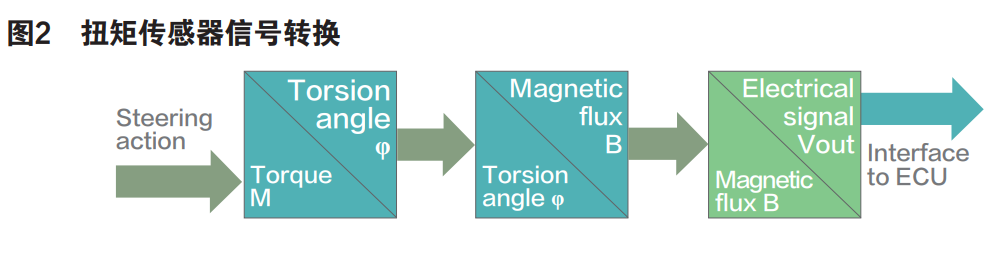
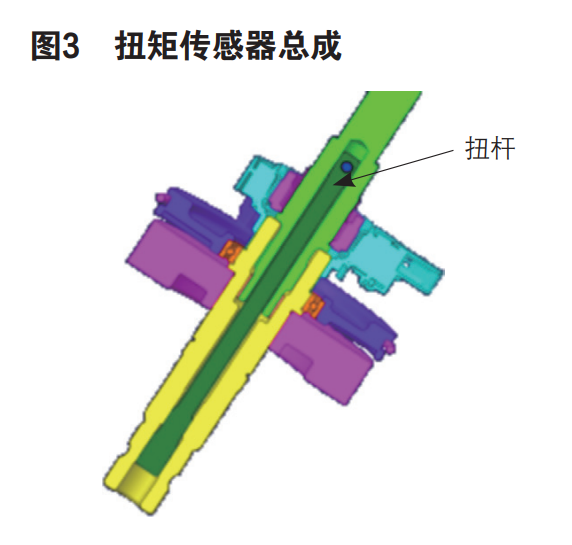
扭矩传感器与扭杆组装在一起构成扭矩传感器总成,方向盘转动时,扭杆与扭矩传 感器的上半部分和下半部分存在一个相对偏转角,扭矩传感器就是通过检测这个相对转角来测量方向盘力矩的。如图 3 所示。
2、分类
按照内部结构分类可分为接触式传感器和非接触式传感器,如表 1 所示。 
接触式传感器由于传感元件之间一直存在滑动摩擦,因此在使用过程中容易受到磨 损老化,出现测量信号不准确甚至报错的情况。这种类型的传感器已经逐渐被淘汰,非接触式传感器成为市场主流。
本文主要介绍应用较为广泛的非接触式 扭矩传感器:霍尔式扭矩传感器。3、工作原理
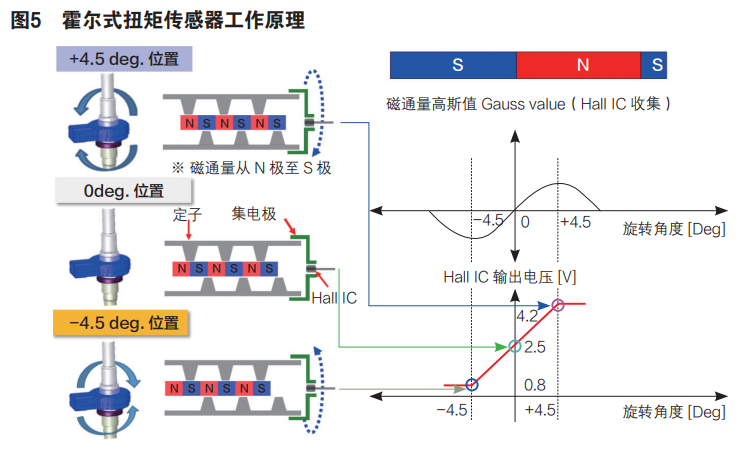
该扭矩传感器通过霍尔效应在导体的两端产生电势差。主要由定子分总成、转子分 总成、上端盖、下端盖、集磁极、Hall IC 组成。转子由多级磁铁组成,固定在输入轴上, 主要是提供磁场。定子上装有磁轭(导磁率比较高的金属材料),固定在下端盖上,下端盖与壳体固定。当方向盘向左转动时,传感器扭杆发生扭转变形,导致转子和定子发生转动,使得上下磁轭与多级磁铁发生错动, 磁通量从 N 极至 S 极,Hall IC 接收到磁通。如果转子与定子反方向相对位移,Hall IC 也接收反向的磁通。磁通的变化经过霍尔 IC 转换为相应的电压变化,从而测量出相应的扭矩大小和方向。如图 4 所示。 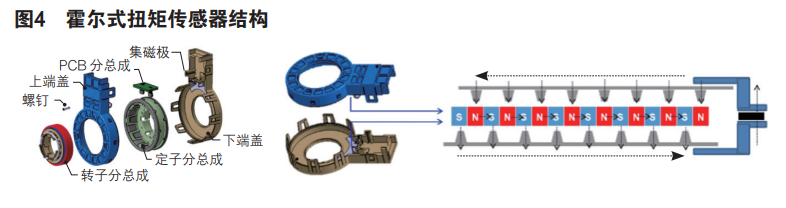
当方向盘在中间位置时,磁通量为零。当方向盘左转(+4.5°),磁通量高斯值为 550(示例)。当方向盘右转(-4.5°),磁通量反向, 高斯值为 -550(示例),如图 5 所示。
4、性能指标
4.1 直线度
传感器输出量(电压)与输入量(扭矩)之间的实际关系曲线偏离理想直线的程度。一般要求:≤ ±2%。4.2 迟滞
在测试行程内所有测试位置来回电压的差值。一般要求:≤ 1%。4.3 电压波动
安装完成的 EPS 产品,360°旋转输出轴,传感器信号的电压变化。一般要求:0.08V (max)。4.4 中位电压
判断转向管柱是否受到转向力的作用。中位电压:2.50V。5、传感器与 EPS 系统的匹配性
5.1 传感器的角度匹配
a、机械限位角度。当转向力增大时,限位机构无法再相对转动。此时限位机构所产生的角度称为机械限位角度。 b、传感器有效角度。当转向力增大时,是指传递给ECU的信号中,产生有效助力的那部分信号,称为有效机械角度。 c、传感器的角度匹配在设计总成和生产装配时,必须保证:机械限位角度>传感器有效角度。5.2 传感器输出电压和扭杆的关系
传感器的输出电压最终是被 ECU 控制器进行采集的,而 ECU 通过计算传感器的电压 信号,得知驾驶员转动方向盘扭矩的大小。那么就必须定义传感器电压和扭矩之间的关系。如果传感器图纸中给定的是电压和角度的关系,那么就必须确定扭杆的刚度来最终 确定输出信号。5.3 扭杆刚度的计算
例:已 知:U=3.5V;T=7.8Nm;K1= (1/3.5)V/°; 公式: 所以:K2=7.8/3.5;K2=2.23Nm/° 其中: U:传感器输出电压,单位 V; T:扭矩,单位 NmK1:传感器电压与角度的关系,单位为 V/°,和传感器的类型有关。 K2:扭杆的刚度,单位为 Nm/°,由扭杆的粗细和长短来确定。主要针对电动助力转向系统用扭矩传感器的工作原理、性能指标和系统匹配等 方面进行了分析,对后续扭矩传感器的开发具有指导意义。
EPS电动助力转向系统
电动助力转向系统(EPS)是汽车转向系统的发展方向,该系统由电机直接提供转向助力,省去了液压转向系统所必需的油泵、软管、液压油、传送带等机械部件,具有能耗小,污染少,省空间等一系列优点。
目前EPS已广泛装备于轿车上并表现出明显的优越性,系统会根据扭矩、车速、转向角度、转向速度等多种信号进行综合控制以取得更优控制性能。驾驶员在操纵方向盘进行转向时,转矩传感器检测到转向盘的转向以及转矩的大小,将电压信号输送到电子控制单元,电子控制单元根据转矩传感器检测到的转矩电压信号、转动方向和车速信号等,向电动机控制器发出指令,使电动机输出相应大小和方向的转向助力转矩,从而产生辅助动力。
该演示方案是由 ST 车规级 32-bit PowerPC 架构的微处理器 SPC560P50 以及6路MOS驱动IC L9908和车规级MOS组成。方案适合12V、24V、48V系统,同时也具备相应的诊断保护功能。

▲ 系统框图
SPC560P50拥有适合于电机开发的FlexPWM以及适配CTU的ADC模块,支持高达64MHz主频的内核更能保证应用资源的需求。
驱动IC L9908支持三路ADC采样以及6路MOS驱动的输出,拥有能读取全故障列表的SPI接口,更适合于标准的三相永磁同步电机方案的开发。
该方案的软件基于ST的SPC5Studio与MCTK(电机控制套件)开发,其中免费的IDE SPC5Studio 提供MCU的各种外设支持,成熟的MCTK平台也提供了各种用于电机控制的接口,可帮助客户减少底层开发周期,并且用于快速系统调试。
电机控制工具套件的关键特点:
- 符合AEC-Q100
- 120MHz Flex PWM模块
- 通过SPC5Studio插件配置SPC5 FOC Lib
- 实现FOC控制的嵌入式软件库(SPC5-MCTK-LIB)
- SPC560P + L9908板
- 带感应/无感应器的BLDC电机
- 演示应用项目
参考文献链接
https://mp.weixin.qq.com/s/YXQuSlE0s-nrcGlRknK43g
https://mp.weixin.qq.com/s/gr0kfRzgBXnyxLYBJ8g0Hg
https://mp.weixin.qq.com/s/YdW1Zjdfviz45DmWUh_6Ag

 浙公网安备 33010602011771号
浙公网安备 33010602011771号