自动驾驶平台,阵营, 主要传感器与场景联系
自动驾驶平台,阵营, 主要传感器与场景联系
1. 自动驾驶平台和阵营
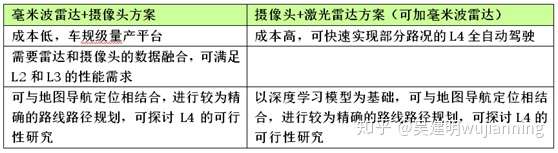
表1. 自动驾驶平台
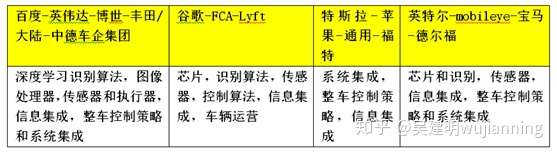
表2. 自动驾驶阵营
2. 自动驾驶常用架构

图1. 三层架构
3. 主要传感器与场景联系
超声波+侧向毫米波----泊车
长距+侧向毫米波+高精地图----高速公路
前后摄像头+前向毫米波----封闭环境
16线激光+前向毫米波----开放环境
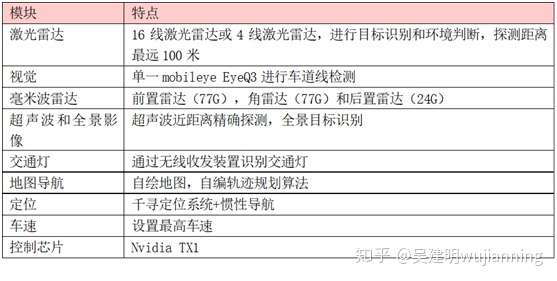
表3. 各个模块特点
人工智能芯片与自动驾驶

自动驾驶平台,阵营, 主要传感器与场景联系
1. 自动驾驶平台和阵营
表1. 自动驾驶平台
表2. 自动驾驶阵营
2. 自动驾驶常用架构
图1. 三层架构
3. 主要传感器与场景联系
超声波+侧向毫米波----泊车
长距+侧向毫米波+高精地图----高速公路
前后摄像头+前向毫米波----封闭环境
16线激光+前向毫米波----开放环境
表3. 各个模块特点

 浙公网安备 33010602011771号
浙公网安备 33010602011771号