自动驾驶系统关系与自动泊车原理
自动驾驶系统关系与自动泊车原理
1. 自动驾驶系统关系
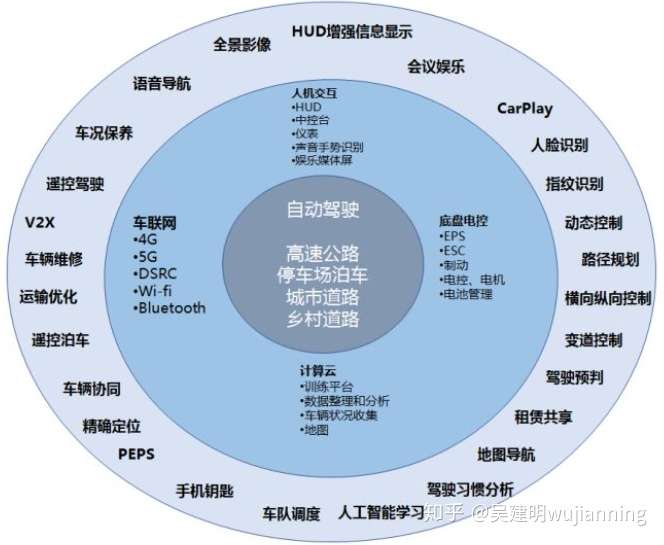
图1. 自动驾驶系统关系
2.关键算法解析——自动泊车
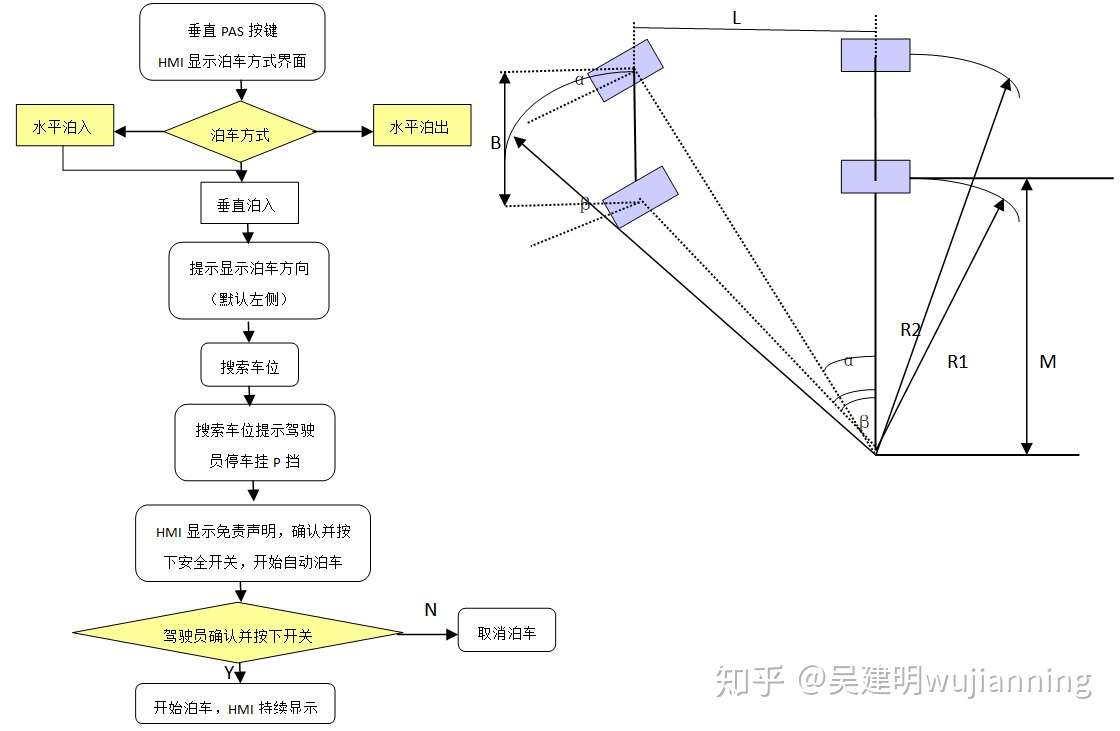
图2. 关键算法解析——自动泊车
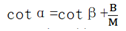
外侧转角α和内侧转角β如下关系式
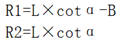
后轮内侧转弯半径R1,后轮外侧转弯半径R2,分别为
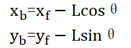
根据几何关系,后轴中心点

与前轴中心点

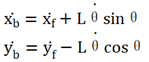
求导得到速度关系
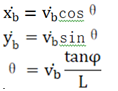
以后轴中心为基准点,车辆低速运动学模型为
人工智能芯片与自动驾驶


自动驾驶系统关系与自动泊车原理
1. 自动驾驶系统关系
图1. 自动驾驶系统关系
2.关键算法解析——自动泊车
图2. 关键算法解析——自动泊车
外侧转角α和内侧转角β如下关系式
后轮内侧转弯半径R1,后轮外侧转弯半径R2,分别为
根据几何关系,后轴中心点
与前轴中心点
求导得到速度关系
以后轴中心为基准点,车辆低速运动学模型为


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 记一次.NET内存居高不下排查解决与启示
· 探究高空视频全景AR技术的实现原理
· 理解Rust引用及其生命周期标识(上)
· 浏览器原生「磁吸」效果!Anchor Positioning 锚点定位神器解析
· 没有源码,如何修改代码逻辑?
· 全程不用写代码,我用AI程序员写了一个飞机大战
· DeepSeek 开源周回顾「GitHub 热点速览」
· 记一次.NET内存居高不下排查解决与启示
· MongoDB 8.0这个新功能碉堡了,比商业数据库还牛
· .NET10 - 预览版1新功能体验(一)