

车辆变道解决方案
车辆变道解决方案
输入输出接口
Input:
(1)图像视频分辨率(整型int)
(2)图像视频格式(RGB,YUV,MP4等)
(3)左右两边的车道线位置信息摄像头标定参数(中心位置(x,y)
和5个畸变系数(2径向,2切向,1棱向),浮点型float)
(4)摄像头初始化参数(摄像头初始位置和三个坐标方向
的旋转角度,车辆宽度高度车速等等,浮点型float)
(5)左右两边的车道线位置信息(浮点型float)
Output:
(1)目标物的位置信息 (浮点型float)
(2)目标物与车辆的距离(浮点型float)
(3)目标物的识别 (整型int)
(4)本车与目标物的速度信息(浮点型float)
31.1 功能定义
(1)计算目标物的位置信息
(2)计算目标物与车辆的距离
(3)计算目标物的识别
(4)计算本车与目标物的速度信息
(5)计算本车与目标物的TTC信息
随着越来越多的企业和机构涉及无人驾驶汽车领域,无人驾驶这项技术已经愈发成熟。不过,无人驾驶汽车造成的事故还是时有发生,究其原因无非就是技术还不够成熟。

图1. 车辆变道算法示例
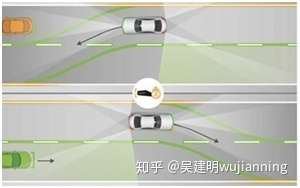
图2. 车辆变道算法分析
31.2 技术路线方案
“变道”技术就是无人驾驶的难点之一,直到今天也无法达到人类驾驶员的水平。如果要做变道技术,可能需要做如下计算:
灯光解读。散布在环境中的信号灯为汽车的机器人大脑提供了重要线索。使用深度学习的人工智能(AI)策略,汽车可以推断出,停在绿灯处不动的汽车可能是熄火了,而在红灯处不动的汽车则是在遵守交通规则。算法还可以得出结论,前方车辆上的闪烁的危险指示灯意味着它短时间内可能不会到达其它地方。
超出测位仪。停在路边的汽车和送货卡车经常在拥挤的城市交通中突然出现。对于自动驾驶汽车而言,只占据车道一部分的汽车可能会停一小段时间。如果前方汽车更靠近路边而不是车道中间,机器人汽车则会选择绕过。
了解路况。如果车辆认为静止的卡车是在送快递,那么车辆极有可能选择超过去。如有疑问,汽车会认为一辆静止的汽车只是暂时停下来,并会在后面等待。这是业内典型的保守做法。
街道共享。如果有人不小心闯入车道,自动驾驶汽车会猛踩刹车。而且,汽车在默认情况下要给骑自行车人提供了很大的泊位。车载摄像头扫描车辆周围的街景,而摄像头的旋转激光-一种称为激光雷达的工具-可测量汽车和其它物体间的距离。雷达读数可帮助计算附近其它车辆的速度。
准备好按路线出发。导航被认为是自动驾驶汽车冒险换道的最佳理由之一。技术团队要给汽车制定好程序来检查一辆汽车在行动前与其它汽车之间是否有足够的距离。本质上来看,计算机执行了被称为“两秒规则”的距离指导方针。此计算还考虑了司机的舒适度:汽车不会突然加大油门往前冲吓到司机。
前方车辆识别。一辆高大的车会阻挡人类和机器人跑车的视野,因此一辆自动驾驶的汽车如果正位于一辆半高的汽车背后,它会停下,除非人为干预。但是,如果车是停在路边或是开着闪光灯,自动驾驶司机可能会尝试通过。最后,工程师们希望车辆间能互相通信,如此一来,一辆停驶的卡车可以与附近的汽车分享其状态。
在道路上行驶的车辆主动变道的动机是
第一,提高车辆的行驶速度
第二,超越慢车或重车
第三,避让障碍物
实施变道控制功能的控制策略开发,包括可换道识别(基于角雷达,前向雷达和前向摄像头判断邻近车道是否可以换道)和换道控制(通过控制EPS,控制车辆平稳快速的换到邻近车道)。
变道辅助系统也称盲区监测,作为一项汽车智能安全技术,能够通过安装的电子 控制系统,在左右两个后视镜内或者其它地方预警后方安全范围内有无障碍物或来 车,从而消除视线盲区,提高行车安全。
目前有代表性的变道辅助系统有以下三类:
第一,奔驰新E级上的变道辅助设备。该装置是通过汽车两侧安装的传感器探知两侧后方是否有车辆,并将信息通过电脑系统控制,在左右两个后视镜内或者其它地方预警后方的来车。
第二,沃尔沃的变道辅助叫盲点信息系统。变道辅助系统采用外后视镜根部的摄像头会对距离3米宽,9.5米长的一个扇形盲区进行25帧/秒的图像监控,如果有速度大于10公 里/小时,且与车辆本身速度差在20-70公里/小时之间的移动物体(车辆或者行人)进入该盲区,系统对比每帧图像,当系统认为目标进一步接近时,A柱上的警示灯就会亮起,防止出现事故。
第三,奥迪的变道辅助叫侧向辅助系统。这套系统会在车速超过60公里/小时介入, 依靠传感器的帮助,奥迪侧向辅助系统可以探测到侧后方最远50米处的车辆,若此时变道有潜在危险,后视镜上就会亮起警示灯。
3. 关键技术参数和性能指标
(1)确定目标物的位置信息
(2)确定目标物与车辆的距离
(3)确定目标物的识别
(4)确定本车与目标物的速度信息
(5)确定本车与目标物的TTC信息


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 记一次.NET内存居高不下排查解决与启示
· 探究高空视频全景AR技术的实现原理
· 理解Rust引用及其生命周期标识(上)
· 浏览器原生「磁吸」效果!Anchor Positioning 锚点定位神器解析
· 没有源码,如何修改代码逻辑?
· 全程不用写代码,我用AI程序员写了一个飞机大战
· DeepSeek 开源周回顾「GitHub 热点速览」
· 记一次.NET内存居高不下排查解决与启示
· MongoDB 8.0这个新功能碉堡了,比商业数据库还牛
· .NET10 - 预览版1新功能体验(一)