OSD的状态转化
简介
本文基于Luminous版本,分析一下OSD各状态的含义和状态转化关系。OSD的状态类型定义在osd_state_t,共有如下几种状态:
typedef enum {
STATE_INITIALIZING = 1,
STATE_PREBOOT,
STATE_BOOTING,
STATE_ACTIVE,
STATE_STOPPING,
STATE_WAITING_FOR_HEALTHY
} osd_state_t;
对于这些状态,其意义和出现的位置见下表,后文将对每个状态进行详细分析。
| 状态 | 意义 | 位置 |
|---|---|---|
STATE_INITIALIZING |
OSD初始状态;新建OSD对象后,state的默认值。 | class OSD |
STATE_PREBOOT |
OSD准备初始化;在OSD::start_boot中发送get_version消息之前设置。 |
OSD::start_boot |
STATE_BOOTING |
OSD正在初始化,在get_version流程结束后,调用回调在OSD::_send_boot中,发送MOSDBoot消息之后设置。 |
OSD::_send_boot |
STATE_ACTIVE |
OSD变为active状态。 | OSD::_committed_osd_maps |
STATE_STOPPING |
OSD开始关闭。 | OSD::shutdown |
STATE_WAITING_FOR_HEALTHY |
OSD等待心跳健康。 | OSD::start_waiting_for_healthy |
STATE_PREBOOT
STATE_INITIALIZING作为新建OSD对象后的初试状态,STATE_PREBOOT才是真正意义上的初试状态。当执行OSD::start_boot时将OSD状态设置为STATE_PREBOOT。首先梳理一下OSD::start_boot在哪些地方调用:
OSD::initOSD::tick:tick线程对应了OSD中的SafeTimer tick_timer。OSD::ms_handle_connectOSD::_committed_osd_maps
首先分析一下OSD::start_boot的流程,然后再分析一下调用OSD::start_boot的逻辑。
OSD::start_boot
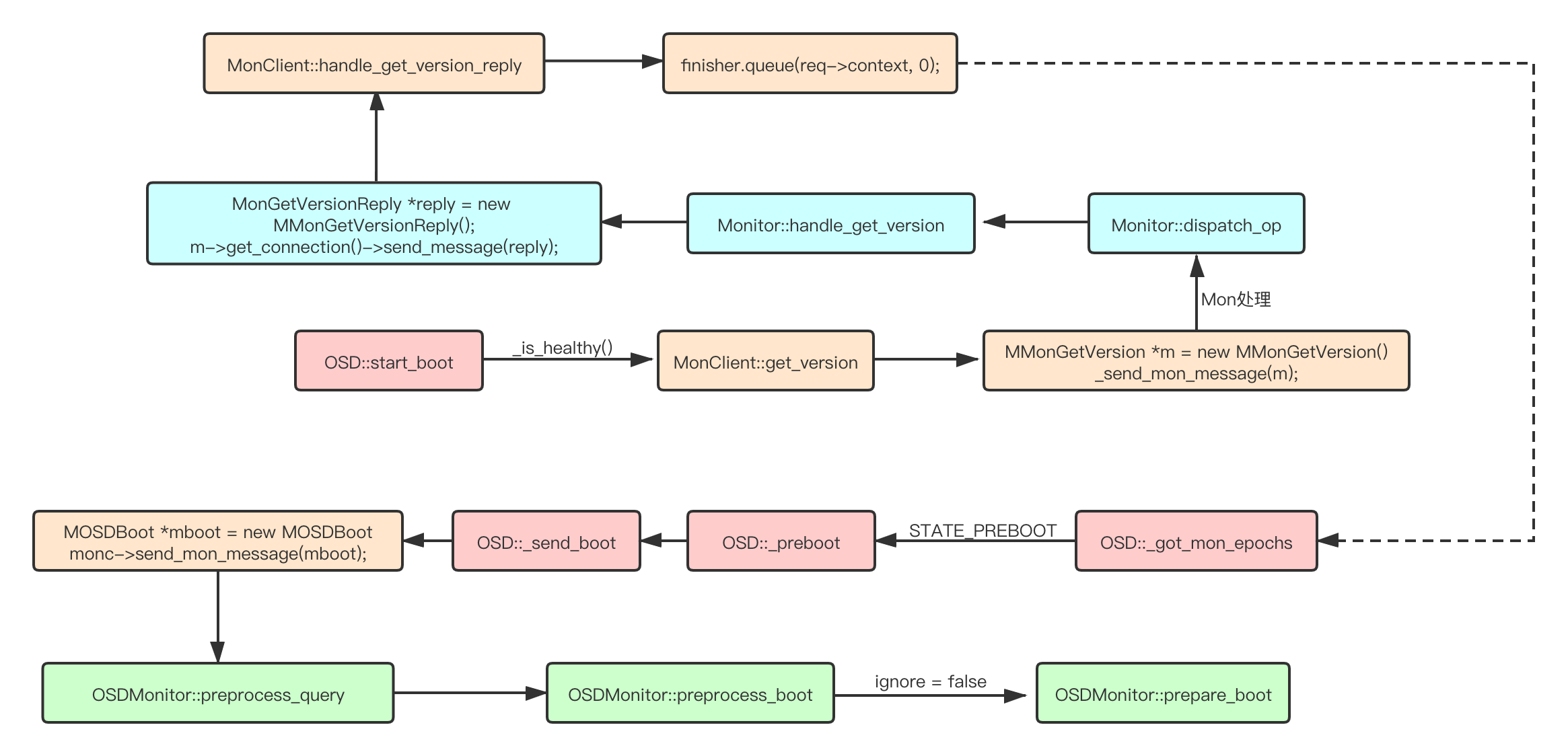
当OSD初始化时,调用OSD::start_boot进入boot流程。函数具体流程为:
- 处理如果OSD不处于健康的状态的情况,详情参考后文
STATE_WAITING_FOR_HEALTHY。 - 通过monclient向mon发送
get_version的消息,获取OSDMap的版本信息,完成后执行回调函数OSD::_got_mon_epochs。 OSD::_got_mon_epochs调用了OSD::_preboot。-
调用
OSD::heartbeat,目的是确认容量状态,不会让一个已经标记了full状态的down osd进入boot流程。关于心跳检测可以参考我另外一片blog。 -
OSDMap相关的检测:
- epoch是否为0
- OSD是否有
CEPH_OSDMAP_NOUP标记,有该标记的OSD不能进入up状态。 - 版本相关信息
- 判断full信息是否需要更新(通过实际状态和OSDMap中的记录对比),需要的话想mon发送
MOSDFull消息。 - 版本检查通过进入
OSD::_send_boot。
-
如果没有成功进入
OSD::_send_boot,调用osdmap_subscribe对OSDMap进行更新,之前只获取了版本号相关的信息。
-
Q:更新了OSDMap之后呢?
A:在OSD::tick线程中会重新调用OSD::start_boot
在OSD::init中调用
OSD::init是OSD启动流程中最主要的函数,在末尾部分会调用**OSD::start_boot**,可以参考我的另一篇blog,这里不做赘述。
在OSD::tick中调用
OSD::tick函数的具体流程为:
- 如果是
STATE_ACTIVE或者STATE_WAITING_FOR_HEALTHY,调用OSD::maybe_update_heartbeat_peers更新heartbeat peer。 - 如果是
STATE_PREBOOT或者STATE_WAITING_FOR_HEALTHY,调用**OSD::start_boot**。 - 调用
OSD::do_waiters对finished中的op进行dispatch。相关内容可以参考我的另一篇blog。
在OSD::ms_handle_connect中调用
OSD::ms_handle_connect作为一个继承Dispatcher需要复写的函数,调用时机为:
- 连接刚建立
- 连接重新连接
即别的通信组件和OSD刚建立连接或者重连的时候,这两种情况也需要调用**OSD::start_boot**,使OSD进入Boot流程。具体的逻辑为:
- 如果OSD处于
STATE_PREBOOT状态将调用**OSD::start_boot**。 - 如果OSD处于
STATE_BOOTING状态说明正在boot的过程中,此时调用OSD::_send_boot。
在OSD::_committed_osd_maps中调用
在OSD::_dispatch中收到OSDMap类型的消息时调用OSD::handle_osd_map,将OSDMap本地化事物生成后会注册两个回调:
store->queue_transaction(
service.meta_osr.get(),
std::move(t),
new C_OnMapApply(&service, pinned_maps, last),
new C_OnMapCommit(this, start, last, m), 0);
在queue_transaction完成后会调用这两个回调类中的finish函数:
- 前者调用
OSDService::clear_map_bl_cache_pins清理map_bl_inc_cache和map_bl_cache的缓存。关于这两个缓存可以查看另一篇blog关于OSDMap处理部分。 - 后者调用
OSD::_committed_osd_maps做新OSDMap相关的处理。
了解了OSD::_committed_osd_maps的调用时机,该函数主要进行了三个判断:
- OSD需不需要关闭
- OSD需不需要重启
- 是否有网络错误
这里受限于篇幅原因,只分析和OSD::start_boot相关的内容。
if (do_shutdown) {
...
}
else if (m->newest_map && m->newest_map > last) {
...
}
else if (is_preboot()) {
if (m->get_source().is_mon())
_preboot(m->oldest_map, m->newest_map);
else
start_boot();
}
else if (do_restart)
start_boot();
可以看出
- 如果OSD不需要关闭且在
STATE_PREBOOT状态。- 如果该OSDMap消息是来自mon,则进入
OSD::_preboot函数。因为已经有了来自mon的最新OSDMap,无需通过上述的get_version去获取OSDMapepoch,直接进入OSD::_preboot函数。 - 如果该OSDMap消息是来自osd,则进入
OSD::start_boot。
- 如果该OSDMap消息是来自mon,则进入
- 如果OSD需要重启,也进入
OSD::start_boot。
STATE_BOOTING
在OSD::_send_boot中设置STATE_BOOTING状态,接上文的OSD::start_boot之后。主要功能为:
- 获取各类addr,为下一步做准备。
- 向mon发送MOSDBoot消息。
STATE_STOPPING
在OSD::shutdown中设置STATE_STOPPING状态,表明OSD处于正在关闭的状态。
在OSDService中还有几个和关闭相关的状态:主要是和OSDService的关闭状态有关。
enum {
NOT_STOPPING,
PREPARING_TO_STOP,
STOPPING
};
NOT_STOPPING为默认值- 在
OSDService::prepare_to_stop向mon发送MOSDMarkMeDown类型的消息(要求ack):- 在发送之前设置为
PREPARING_TO_STOP状态。 - 发送之后且
is_stopping_condSignal后(在OSDService::got_stop_ack中收到ack回复后)设置为STOPPING状态。
- 在发送之前设置为
Q:
OSDService::prepare_to_stop何时调用?
A:在L版中是在OSD::shutdown中,主要作用是给mon发消息。
Q:在日志中怎么搜索这种情况?
A:搜索【telling mon we are shutting down】
Q:这些状态和OSD的的STATE_STOPPING有什么关系?
A:这三个状态主要用来维护OSDService发送消息的流程,和OSD状态没有太大关系。
Q:为什么关闭后要给mon发送消息?
A:需要判断能否mark down,修改OSDMap等工作。详细可以查看OSDMonitor::preprocess_mark_me_down和OSDMonitor::prepare_mark_me_down。关于Mon的消息处理和同步可以参考我另外一篇blog。
STATE_ACTIVE
STATE_ACTIVE表明OSD变为active状态。具体代码在OSD::_committed_osd_maps中:
epoch_t _bind_epoch = service.get_bind_epoch();
// OSDMap中本OSD为up
if (osdmap->is_up(whoami) &&
// OSD为新起的OSD
osdmap->get_addr(whoami) == client_messenger->get_myaddr() &&
_bind_epoch < osdmap->get_up_from(whoami)) {
if (is_booting()) {
dout(1) << "state: booting -> active" << dendl;
// 设置状态
set_state(STATE_ACTIVE);
// set incarnation so that osd_reqid_t's we generate for our
// objecter requests are unique across restarts.
service.objecter->set_client_incarnation(osdmap->get_epoch());
}
}
STATE_WAITING_FOR_HEALTHY
STATE_WAITING_FOR_HEALTHY状态的含义为等待心跳健康的阶段,在OSD::start_waiting_for_healthy中设置,关于心跳检测可以参考我的另外一篇blog。
如何定义健康?在OSD::start_boot中对是否健康进行了判断,如果在OSD boot的过程中还处于不健康的状态,不进行boot后续操作。
if (!_is_healthy()) {
// if we are not healthy, do not mark ourselves up (yet)
dout(1) << "not healthy; waiting to boot" << dendl;
if (!is_waiting_for_healthy())
start_waiting_for_healthy();
// send pings sooner rather than later
heartbeat_kick();
return;
}
可以看到判断的关键在OSD::_is_healthy 函数,在该函数中有两个判断点:
- 通过
HeartbeatMap::_check检查所有心跳线程是否超时。 - 检查所有的
Heartbeat_peers成员是否健康,如果满足一下任意一个条件则为不健康:- 没有收到心跳前peer或后peer的回复。
ping_history不为空(说明不是没有发送ping消息或者已经接受了所有回复的情况)且现在的时间now已经大于ping_history的oldest_deadline时间。
总结
OSD的状态变化和PG相比相对来说比较简单,本文着重分析了流程和主要函数,理解状态变化对理解OSD是至关重要的。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号