郑捷《机器学习算法原理与编程实践》学习笔记(第五章 梯度寻优)5.1 最优化与计算复杂度
5.1 最优化与计算复杂度
5.1.1 最优化理论
5.1.2 最优化的数学描述
最优化问题的基本数学模型如下:

在上述模型中:
- x是位于实数域(R)范围内的n维向量,x被称为决策变量或问题的解。
- s.t.为英文subject的缩写,表示受限于。
- f(x)称为目标函数或代价函数(Cost Function),如上式,我们要求f(x)的最小值(或最大值)
- h(x)为等式约束:g(x)为不等式约束
初次之外,最优化问题的无约束问题还可能被表述为如下这个方式:

其中argmax符号是指求解当函数f(x)达到最大值(或最小值)时的x取值。
根据目标函数与约束函数的不同形式,可以把最优化的问题分为不同的类型:若f(x)、h(x)、g(x)三个函数都是线性函数,就称为线性规划;若其中任一一个是非线性函数,那么就称为非线性函数;若目标函数为二次函数,约束全为线性函数,就为二次规划;若目标函数是向量函数,则成为多目标规划等。
5.1.3 凸集与分离定理
如图5.1所示。在实数域R上的向量空间中,如果集合S中的任一两点的连线上的点都在S内,则成为S为凸集。
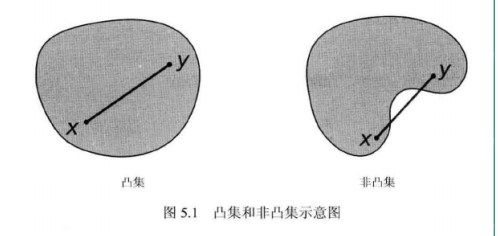
1、凸集的满足条件
设X€Rn是一个凸集,当且仅当:

其中X是一个集合(矩阵),x1,x2是集合中的两个向量,α位于[0,1]。
这个公式说明,如果一个集合X是凸集,则该集合中的任一两个点x1和x2连成一条线段,该线段的任一一点也位于集合X中。
2、超平面和支撑平面
超平面被定义为点集X:
X={x|cTx=z}
其中,x是集合X中的一组向量,c是同纬度的系数向量:cT是c的转置;z是一个标量。
支撑超平面:设凸集X上的一个超平面cTx=z,现在我们给出凸集X的边界点w,得到cTw=z为凸集X的支撑超平面。
3、凸集的分离定理
如果两个凸集之间没有交叉和重合的部分,就可以用超平面将两者隔开,这就是凸集分离定理。
设S1,S2∈Rn为两个非空集合,如果存在非零集合p∈Rn及α∈R,使得:
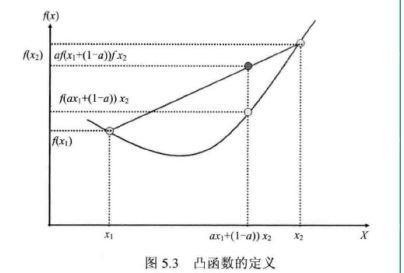
5.1.4 凸函数及其性质
凸函数:f(αx1+(1-α)x2)≤f(α)x1+f(1-α)x2
凸函数判定(略)
5.1.5 局部最优与全局最优
5.1.6 算法复杂度
时间复杂度与空间复杂度 、结果确定性与不确定性
资料来源:郑捷 《机器学习算法原理与编程实践》 仅供学习研究

 浙公网安备 33010602011771号
浙公网安备 33010602011771号