STM32F103移值FreeRtos笔记
RTOS版本:FreeRTOS_V8.2.2
一、下载FreeRTOS源文件
这个可以在百度上下载,或者在官网上面下载http://www.freertos.org/a00104.html
下图位置即可下载了
目前最新版本是8.2.2
二、下载源码下来,解压,将源码添加到工程
2.1 新建一个移植工程(拷贝原子哥的也行),在工程中新建一个文件夹FreeRTOS存放源码
2.2 打开解压到的源码“..\FreeRTOSv8.2.2”,里边有几个文件夹和文件等东西

看到上图中红色圈圈的就是源码了,整个文件夹拷贝到新建工程的“FreeRTOS”文件夹中
2.4 在源码文件夹中“..\FreeRTOSv8.2.2\FreeRTOS\Demo\CORTEX_STM32F103_Keil”这个路径下,找到文件“FreeRTOSConfig.h”,拷贝到工程文件夹“FreeRTOS”中
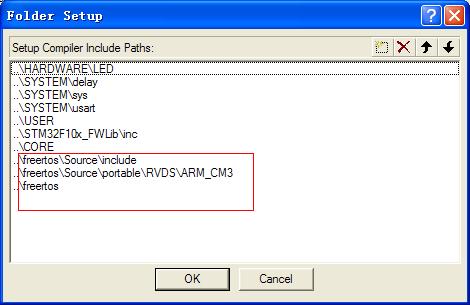
三、打开MDK软件,新建工程,添加文件
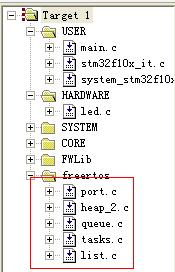
添加文件如上如所示,红色框框就是添加的FreeRTOS文件了;
“port.c”文件路径..\FreeRTOS\Source\portable\RVDS\ARM_CM3
“heap_2.c”文件路径..\FreeRTOS\Source\portable\MemMang
“list.c”、“queue.c”、“tasks.c”文件路径..\FreeRTOS\Source
五、完成以上工作之后,编写main函数了
#include "FreeRTOS.h"
#include "task.h"
#include "queue.h"
#include "misc.h"
#include "led.h"
void LED0_Task(void *pvParameters);
void LED1_Task(void *pvParameters);
int main()
{
LED_Init(); //初始化与LED连接的硬件接口
xTaskCreate(LED0_Task,(const char *)"LED0",configMINIMAL_STACK_SIZE,NULL,tskIDLE_PRIORITY+3,NULL);
xTaskCreate(LED1_Task,(const char *)"LED1",configMINIMAL_STACK_SIZE,NULL,tskIDLE_PRIORITY+4,NULL);
vTaskStartScheduler();
}
void LED0_Task(void *pvParameters)
{
while(1)
{
LED0=!LED0;
vTaskDelay(1000/portTICK_RATE_MS);
}
}
void LED1_Task(void *pvParameters)
{
while(1)
{
LED1=!LED1;
vTaskDelay(300/portTICK_RATE_MS);
}
}
只设置了两个LED,按照不同的频率闪烁
六、修改启动文件,首先见启动文件的只读属性去掉,否则修改不了(已经去掉的就略过了)
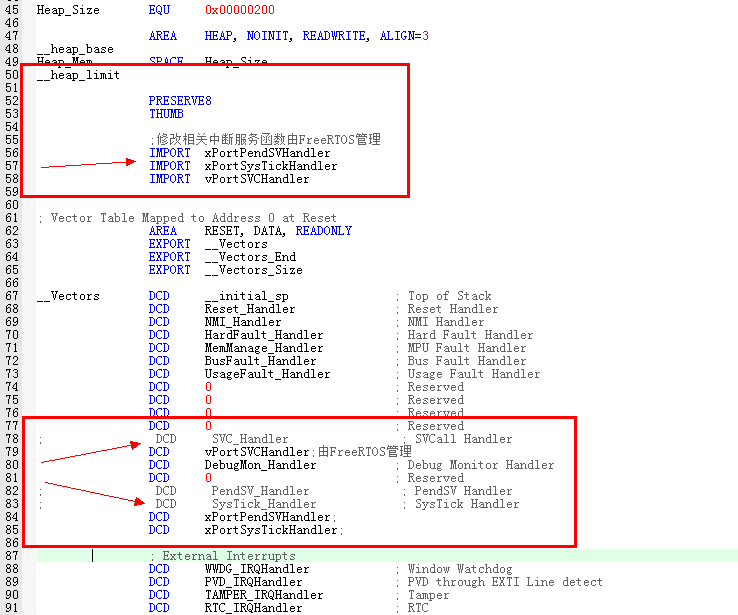
为什么这么改,我也不明白,IMPORT和EXPORT一个是调用内部引用文件,一个是调用外部引用文件,就和C语音写extern意思差不多。修改这几个地方将函数名和port.c文件中的相同就性了,好调用freertos的函数
七、搞定之后,就开始编译改错了,完成后就下载,看到两个灯按照不同的频率在闪烁,呵呵
八、上面差不多也算大功告成了,另外在中断的时候怎么办,需要保护机制。
//外部中断2服务程序
void EXTI2_IRQHandler(void)
{
taskENTER_CRITICAL();
delay_us(1000);
if(KEY2==0) //按键KEY2
{
BEEP=!BEEP;
}
EXTI_ClearITPendingBit(EXTI_Line2); //清除LINE2上的中断标志位
taskEXIT_CRITICAL();
}
测试了下,在两个灯的基础上,写了一个KEY(用中断方式)触发蜂鸣器,也是可行的。
上面理解了,基本上算入门了,下面主要还是研究UCOS-III,虽然freertos是完全免费的,UCOS需要收费,但是在国内的公司,只要不出口,还是用UCOS的多,混口饭吃还是随大流了,思维方式差不多
我总结了攻城狮在MCU时间利用率上有三个阶段
第一个阶段,只要有延时就采用delay方法,死等,不碰个头破血流不回头
第二个阶段,采用标志位,之前我一直是这样的,我要10ms检测一个东西,我会设置一个主定时,不断的查询到了没有,到了才执行,不到就执行其他事情
第三个阶段,采用操作系统,把上面查询的时间也省了,一个任务完成了,会自动进入到下一个优先级高的地方去,虽然有空闲模式,但是在任务集中的时候,效率还是很高的。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号