rtthread 添加串口 (uart3)
1.查询uart配置过程
文件路径: /drivers/board.h
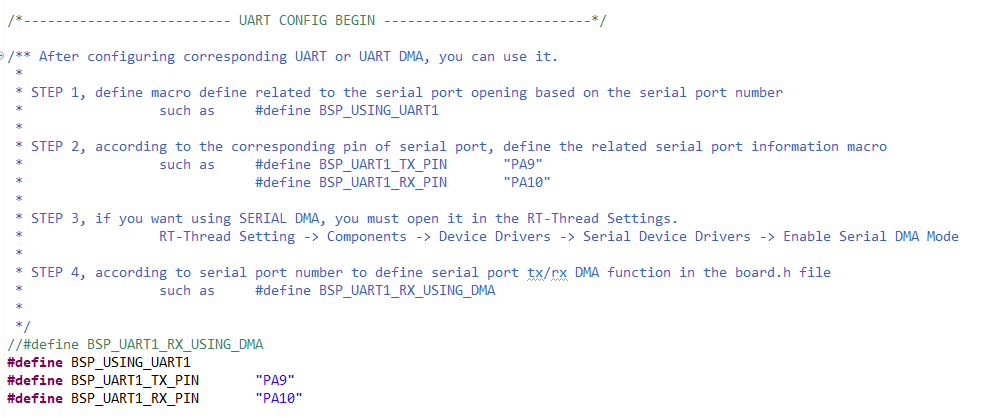
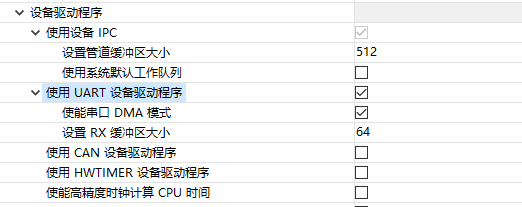
使能RTT uart驱动
2.使能usart3总线
打开 /drivers/board.h
#define BSP_UART3_RX_USING_DMA
#define BSP_USING_UART3
#define BSP_UART1_TX_PIN "PB10"
#define BSP_UART1_RX_PIN "PB11"
3.使能HAL库相应模块
打开 /drivers/ stm32f7xx_hal_conf.h
使能 #define HAL_UART_MODULE_ENABLED
4.添加硬件初始化代码
通过 stm32cubemx工具使能uart2硬件,在一下路径
\Core\Src\stm32f7xx_hal_msp.c中将HAL_UART_MspInit拷贝到 /drivers/board.c中
void HAL_UART_MspInit(UART_HandleTypeDef* uartHandle) { GPIO_InitTypeDef GPIO_InitStruct = {0}; if(uartHandle->Instance==USART3) { /* USART3 clock enable */ __HAL_RCC_USART3_CLK_ENABLE(); __HAL_RCC_GPIOB_CLK_ENABLE(); /**USART3 GPIO Configuration PB10 ------> USART3_TX PB11 ------> USART3_RX */ GPIO_InitStruct.Pin = GPIO_PIN_10; GPIO_InitStruct.Mode = GPIO_MODE_AF_PP; GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH; HAL_GPIO_Init(GPIOB, &GPIO_InitStruct); GPIO_InitStruct.Pin = GPIO_PIN_11; GPIO_InitStruct.Mode = GPIO_MODE_INPUT; GPIO_InitStruct.Pull = GPIO_NOPULL; HAL_GPIO_Init(GPIOB, &GPIO_InitStruct); } }
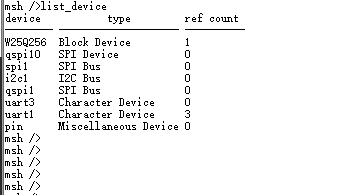
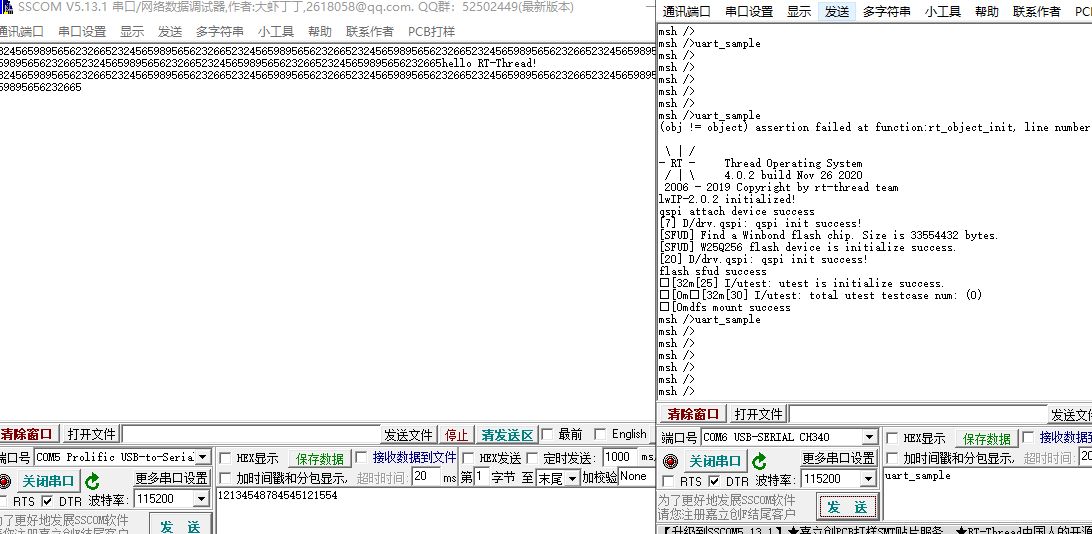
5.验证
6.测试代码
#include <rtthread.h> #define SAMPLE_UART_NAME "uart3" /* 用于接收消息的信号量 */ static struct rt_semaphore rx_sem; static rt_device_t serial; /* 接收数据回调函数 */ static rt_err_t uart_input(rt_device_t dev, rt_size_t size) { /* 串口接收到数据后产生中断,调用此回调函数,然后发送接收信号量 */ rt_sem_release(&rx_sem); return RT_EOK; } /** * 串口接受线程 * @param parameter */ static void serial_thread_entry(void *parameter) { char ch; while (1) { /* 从串口读取一个字节的数据,没有读取到则等待接收信号量 */ while (rt_device_read(serial, -1, &ch, 1) != 1) { /* 阻塞等待接收信号量,等到信号量后再次读取数据 */ rt_sem_take(&rx_sem, RT_WAITING_FOREVER); } /* 读取到的数据通过串口错位输出 */ ch = ch + 1; rt_device_write(serial, 0, &ch, 1); } } static int uart_sample(int argc, char *argv[]) { rt_err_t ret = RT_EOK; char uart_name[RT_NAME_MAX]; char str[] = "hello RT-Thread!\r\n"; if (argc == 2) { rt_strncpy(uart_name, argv[1], RT_NAME_MAX); } else { rt_strncpy(uart_name, SAMPLE_UART_NAME, RT_NAME_MAX); } /* 查找系统中的串口设备 */ serial = rt_device_find(uart_name); if (!serial) { rt_kprintf("find %s failed!\n", uart_name); return RT_ERROR; } /* 初始化信号量 */ rt_sem_init(&rx_sem, "rx_sem", 0, RT_IPC_FLAG_FIFO); /* 以中断接收及轮询发送模式打开串口设备 */ rt_device_open(serial, RT_DEVICE_FLAG_INT_RX); /* 设置接收回调函数 */ rt_device_set_rx_indicate(serial, uart_input); /* 发送字符串 */ rt_device_write(serial, 0, str, (sizeof(str) - 1)); /* 创建 serial 线程 */ rt_thread_t thread = rt_thread_create("serial", serial_thread_entry, RT_NULL, 1024, 25, 10); /* 创建成功则启动线程 */ if (thread != RT_NULL) { rt_thread_startup(thread); } else { ret = RT_ERROR; } return ret; } /* 导出到 msh 命令列表中 */ MSH_CMD_EXPORT(uart_sample, uart device sample);

 浙公网安备 33010602011771号
浙公网安备 33010602011771号